基于液压驱动控制夹具的模型设计
2011-06-23张国勇魏圣坤
张国勇 ,沈 印,魏圣坤 ,付 波
(1.四川化工职业技术学院,四川泸州646000;2.泸州职业技术学院,四川泸州646000)
产品的设计与零件的制造,往往需要靠一些加工设备来获得所需的尺寸精度,相应在加工的时候要运用到夹具。研究夹具的重点,是在静态变形和部分自由度的限制。但很少有人注意夹具的动态性能。然而,系统的动态性能,往往很大程度上影响加工精度。虽然有大量的研究对此安装了固定装置,但是效果并不是很好。可以利用反馈控制,来补偿由加工装置引起的变形,并对切削力进行分析。
许多研究,特别是对加工和颤振的的研究,传统的控制器可以用来提供支持和约束,否则只能是用非常庞大的固定装置。如果可能的话,可以建立弹簧阻尼元件,用来描述定位器与定位器(接触)刚度模型,这种方法已被广泛应用于制造业和研究平台。在目前,提出了一种液压驱动控制夹具系统,即用液压执行器来控制位移的夹紧力来进行夹紧。
1 控制方法
控制模型技术已经成熟,为了克服有限元分析模型控制的复杂性,根据克雷格-班普顿信息模式方法,认识到一个系统的动力学特征频率,系由最低的模式为主,关键在于有限元软件ABAQUS的使用,目的是建立一个夹具系统的反馈装置,以使夹具系统比传统设计更安全更合理。
所以,作为刚体的一部分的液压传动器模型,部分将利用有限元建模软件。该系统将描述部分有限元模型,并将建立一个液压执行器和伺服阀的模型(如图1所示)。
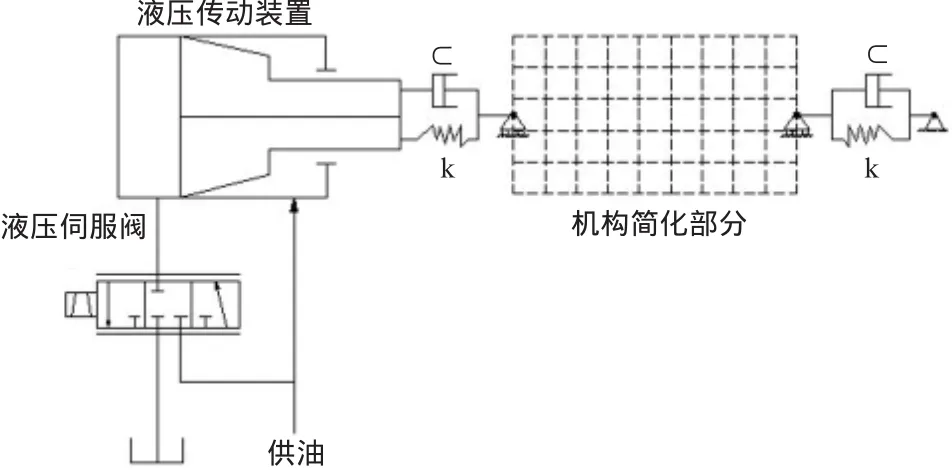
图1 液压执行器和伺服阀的模型
2 建模
为减少使用模型的机构数量,先建立一个简单的模型,对控制驱动部分夹具系统进行有限元分析,其次由执行机构进行模拟,最后,提出了有限元建模,从而使夹具系统的运行状态得到确定。
2.1 夹具模型
当前任务的目的,是模拟一个活动的夹具模型。夹具是假设由一个驱动器、弹簧、阻尼器、一些连接元素、执行器和支撑面所构成。在当前可以被认为是一个在制造行业广泛应用液压制动器。液压执行器的模型由此得以建立起来,此外,模型还描述了液压伺服阀的动态行为。
如图1所示,由活动夹具组成的液压执行器,一个液压伺服阀和机构简化部分是连接到支撑面,由执行机构弹簧和阻尼元素过渡连接。图1显示了这些连接的节点部分的夹紧和定位,在加工节点可以作水平的移动和垂直方向的自由移动,由于其只需要在水平方向的力,而摩擦是在当前被忽视,因此它只是假设的条件。因此,节点连接到夹具部分,是受在垂直方向的限制,只能自由地在水平方向移动,这就是边界条件。
2.2 方法
(1)采用一般的方法,以方便得到夹具系统的控制部分简化模型,是基于系统中的夹具和零件的设计。在设计中,制造工程师确定制造(加工)哪些业务需要,并在他们之中进行零件的图纸和工装夹具,通常的三维计算机辅助设计(CAD)软件,会根据零件安排的夹具图,可以导出到有限元软件平台。
在某些情况下,一个中间交换文件格式需要使用绘图数据到有限元软件。如果是几何级数部分简化的几何形状,有一个类似机械的结构,这时就被称为参数化模型。
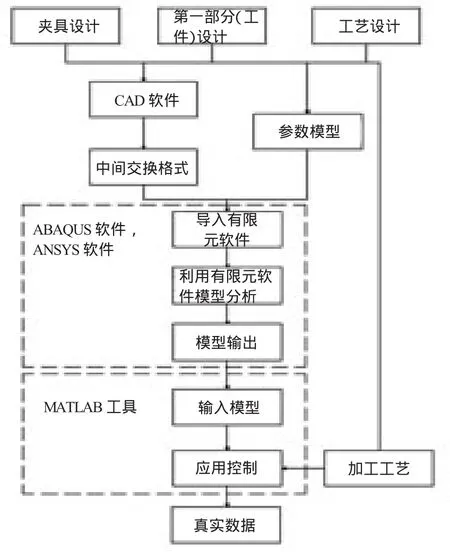
图2 部分夹具控制系统的简化模型
(2)MATLAB和MATLAB工具箱,用来装载并创建一个矩阵动力学模型。应用执行器和一个合适的控制器进行建模和耦合到系统,该模型可以应用于实时控制,采用适当的电脑执行夹具系统。
2.3 有限元程序
(1)有限元程序或组件的子结构模态综合技术,已被用来模拟复杂的结构,如20世纪60年代以来的飞机,计算复杂的机械结构时,可以作为一个整体来计算。其结构是会经过分成几部分组成的模型。
图3显示了一个结构典型的例子——悬臂梁。在图3(a)可以看出,梁分成3个部分。如图3(b)所示,其中典型的组件之一是内部坐标,可以使用模型降阶方法。B为边界的坐标,都需要建立模型。他们都是由外部坐标E,其中应用和外部的冗余坐标R组件到另一个组件。在当前的文件中,为了减少针对控制模型的组件,在当前的文件不需要同时耦合几个组件。
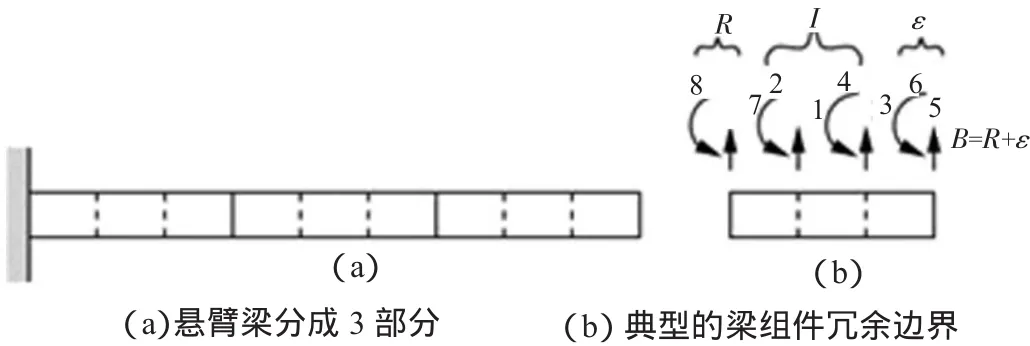
图3 悬臂梁示意图
(2)固定接口模式。使用克雷格-班普顿还原法,它是内部“信息”坐标静态和动态信息坐标的合成,被誉为固定接口模式。固定接口模式,通过给被发现的外部零件零位飘逸边界坐标,然后找到自由振动模态。
2.4 控制策略
位置反馈的使用:第一是执行器的位移(ADFB);第二是部分的位移(PDFB);第三,是力的反馈(FFB的)。
目前的研究不涉及反馈或并联补偿,当前文件的目的,是调查和比较了几种经典形式串联补偿控制策略。对于这两种形式的位置反馈和力反馈看来,一个积分和微分(PID)控制器创建一个不稳定平面,这减少了控制策略,在PID控制的情况下,转移函数的控制器的定义如下
引导和滞后滤波器的传递函数为
这些设置的确定,有利于控制器的最大响应,并从最低补偿角频率开始响应。这样当
补偿器是一种调节机制,当
可以用来获取相位中一些超前的数据。
3 结束语
研究的主要发现是,位置反馈可以用来最大限度地减少不必要的工件位移,从而节约了工时,提高了工作效率,应当指出,位置反馈控制系统在比例控制中的应用,可以成功地用于稳定部分夹具系统。
[1]王孙安.工业系统的驱动、测量、建模与控制下册[M].北京:机械工业出版社,2008.
[2]廉师友.人工智能技术导论[M].西安:西安电子科技大学出版社,2002.
[3]程树康.新型电驱动控制系统及其相关技术[M].北京:机械工业出版社,2005.
