基于均匀圆阵的近场源三维参数估计
2011-06-04胡增辉朱炬波梁甸农
胡增辉 朱炬波 何 峰 梁甸农
(1.国防科学技术大学电子科学与工程学院,湖南 长沙 410073;2.国防科学技术大学理学院,湖南 长沙 410073;3.酒泉卫星发射中心,甘肃 酒泉 732750)
1.引 言
与均匀线阵(ULA)相比,均匀圆阵(UCA)具有许多优异的特性,如能同时估计信号的方位角和俯仰角、测向精度随方位角变化不明显等。基于均匀圆阵的波达参数估计一直是阵列信号处理领域的研究热点。
目前,基于均匀圆阵的波达参数估计算法[1-4]的研究主要集中在二维波达角估计上,即方位角和俯仰角的估计。然而,当源信号位于圆阵的Fresnel区域[5]内时,远场条件下的平面波前假设不再成立。在此情形下,除方位角和俯仰角外,源信号到圆阵的距离也需要估计。然而,到目前为止,基于均匀圆阵的近场参数估计算法非常少。LEE[6]等人利用路径跟踪技术,提出了一种近场源三维参数估计算法。该算法首先利用二维多重信号分类(MUSIC)算法,得到方位角和俯仰角的初始估计,然后利用路径跟踪技术,多次搜索得到距离、方位角和俯仰角的联合估计。然而,二维MUSIC算法需要进行二维频域搜索,计算量非常大,且其估计精度受搜索步长的影响。
高阶累积量[7-8]在空间谱估计中有着广泛的应用,它能够抑制高斯噪声。在文献[6]算法结论的基础上,提出一种基于高阶累积量矩阵联合对角化[9-10]的均匀圆阵近场源三维参数估计算法,该算法无需进行二维频域搜索。
2.理论分析
首先介绍相关信号模型及假设条件,然后构造一组高阶累积量矩阵,通过累积量矩阵联合近似对角化得到阵列流形矩阵的估计。利用阵列流形矩阵的估计及文献[6]的结论,首先得到方位角的精确估计和距离、俯仰角的粗略估计。为提高估计精度,利用最小二乘方法来获得更高精度的估计。
2.1 信号模型
考虑由N个各向同性阵元组成的均匀圆阵(如图1所示),以均匀圆阵所在的平面为x-y平面,圆阵圆心为坐标原点,圆阵半径为R.M个具有相同中心频率fc的独立近场窄带信号入射阵列,入射参数为(rk,θk,φk),k=1,…,M.为避免模糊,通常假设θk∈[0,π/2),φk∈[0,2π).
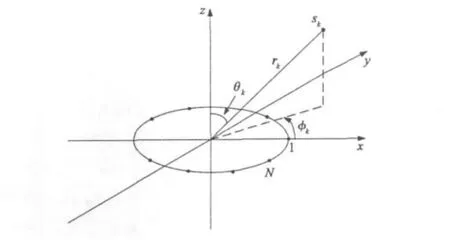
图1 均匀圆阵结构示意图
以坐标原点处的虚拟阵元为相位参考点,t时刻第i个阵元的输出为

式中:sk(t)为第k个源信号;ni(t)表示第i个阵元上的加性高斯白噪声;ai(rk,θk,φk)为第k个源信号对应的导向矢量a(rk,θk,φk)的第i个元素:

式中:ω=2π/λ,λ为信号的载波波长,上标T表示向量和矩阵的转置,Rl(rk,θk,φk)为第k个源信号到第l个阵元的距离,且有

其中ρl(θk,φk)=sinθkcos(φk-(l-1)θ0),l=1,…,N,θ0=2π/N.
对于近场源,利用 Fresnel近似,Rl(rk,θk,φk)可以近似为
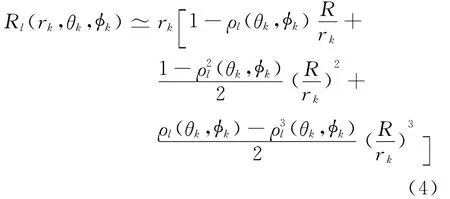
式(1)用矩阵形式表示为

式中:x(t)= [x1(t),…,xN(t)]T为接收信号矢量;A= [a(r1,θ1,φ1),…,a(rM,θM,φM)]为阵列流形矩阵;s(t)= [s1(t),…,sM(t)]T和n(t)= [n1(t),…,nN(t)]T分别为源信号矢量和噪声矢量。
对信号模型作如下假设:
1)源信号是相互统计独立的窄带平稳随机过程,它们的四阶累积量均不为零。
2)阵元上的加性噪声是零均值白高斯过程,噪声与信号之间是相互统计独立的。
3)N≥M,阵列流形矩阵A是列满秩的。
4)相邻阵元间距d和载波波长λ之间满足如下关系:d≤λ/2.
假设2)~4)为近场源参数估计问题的一般性假设,而假设1)则是基于高阶累积量的算法所通常需要的假设条件。另外,源信号数目M的确定属于信号检测问题,已有许多文献研究该问题,因此,假设M是已知的。
2.2 阵列流形矩阵A的估计
定义阵元接收数据的四阶累积量[9]

式中:表示标量xi的共轭;xH表示矢量x的转置共轭;E{x}表示随机变量x的期望。
由式(5)及假设H1和H2,Ci具有如下形式

式中:Γi=diag{cs1|A(i,1)|2,…,csM|A(i,M)|2},diag{z1,z2}表示以z1和z2为对角线元素的对角矩阵,csi=cum{,si}为源信号si(t)的四阶累积量;A(i,k)表示A的第i行第k列元素。
由于A是满秩的,对任意的1≤i≠k≤M,至少存在m∈ {1,...,N},使得Γm的第i个和第k个对角线元素不相同。因此,可以应用矩阵联合对角化技术到来得到A的估计。
矩阵联合对角化是指,寻找满足一定约束条件(如范数为某个常数)的非零矩阵V,使得式(8)定义的代价函数值最小。

式中off{B}表示矩阵B非对角线元素绝对值平方和。
文中利用文献[11]中的非正交联合对角化算法得到A的估计。
理想情况(无噪声,源信号之间严格统计独立)下,A的估计与A之间满足

式中:Λ为一对角线元素非零的对角矩阵,代表估计的尺度不确定性;P为一置换矩阵,代表顺序不确定性。
置换矩阵P对于结果的影响可以忽略。因为A每列可由一组不完全相同的(r,θ,φ)表示。得到后,由~A的每列可得到一组(r,θ,φ)的估计。因此,后文不考虑P的影响,即假设

2.3 方位角估计
文献[6]指出,无论距离和俯仰角取值如何,近场方位角等于距离无穷远时的方位角。因此,利用该结论及已有的远场均匀圆阵二维波达角估计算法,结合式(10)的~A,可以首先得到较为精确的方位角估计。
令Λ=diag{λ1,...,λM},记的第k列为则

定义 (N-1)×1维矢量bk(l)=(l+1)/(l),将式(11)及式(2)代入bk的定义式中可得

由文献[6]的结论,令rk→∞,由于ω|(Rl+1(rk,θk,φk)-Rl(rk,θk,φk)|≤2πd/λ≤π,因此,由式(12)可以得到

式中arg{·}表示相位算子,其取值范围为[-π,π].将式(13)用矩阵表示为

式中η= [sinθksinφk,sinθkcosφk]T
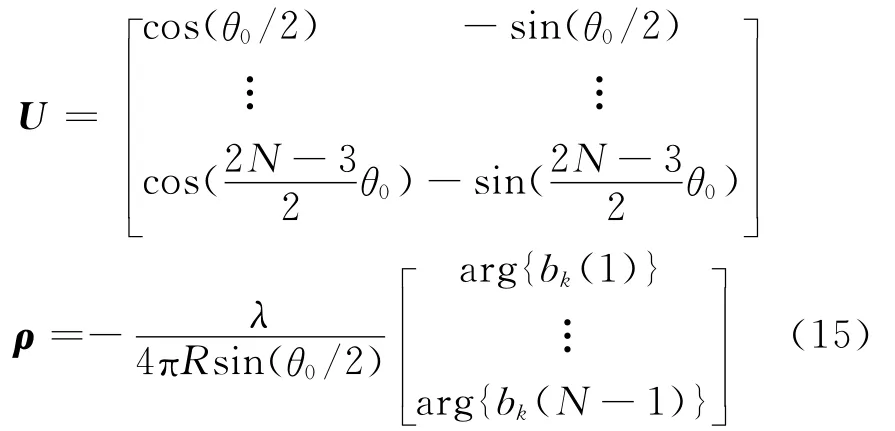
利用线性最小二乘,由式(14)可得η的估计,记为=(UHU)-1UHρ。由可得到方位角φk的估计为

2.4 距离和俯仰角估计
由2.3节的讨论知,利用的每列可以得到一个方位角的估计。本节,利用以及方位角的估计,对距离和俯仰角进行估计。
对的第k列,由式(12)和(13)有

将式(4)代入式(17)可得

式中:pl+1=pl+1(θk,φk);pl=pl(θk,φk).
令αk(l)=cos(φk-(l-1)θ0)-cos(φk-lθ0),γk=arg{bk(l)}/(ωR),yk=sinθk,zk=R/rk,βk(l)=cos(φk-(l-1)θ0)+cos(φk-lθ0),式(18)可以简化为

式(19)用矩阵表示为

式中:
由式(20)和0≤θk<π/2,以及源信号位于圆阵的Fresnel区域内的约束条件,利用线性最小二乘方法可以求得(rk,θk)的估计值,记为)。估计过程中,将由式(16)得到的代替φk.
综上所述,由的每一列,可得到某个源对应的波达参数(rk,θk,φk)的估计().
由式(11)~(22)可得到波达参数的粗略估计。然而,通常情况下,距离和俯仰角的估计精度可能不是很高,原因可能是多方面的
1)Fresnel近似误差可能非常小,但传播到每个参数上的误差可能非常大;
2)矩阵A的估计存在一定的误差;
3)即使方位角φ的估计精度很高,由式(20)估计(r,θ)时,φ的微小误差也可能被放大。
对A的估计的第l列,利用(rl,θl,φl)的初始估计(),(rl,θl,φl)可由如下的约束最小值问题重新估计,即

式中f(rl,θl,φl)称为残差函数,其定义为

其中bl定义见式(12),d定义为

式(23)为典型的约束非线性最小二乘问题,可应 用 经 典 的 Gauss-Newton 或 Levenberg-Marquardt等算法[12]进行求解,由式(11)~(22)估计得到的()作为迭代初值。由于迭代初值与真值误差(尤其是方位角)不是非常大,通常迭代几步即可得到收敛值。
3.实验结果分析
本节通过仿真实验验证所提算法的有效性,并将文中算法与文献[6]中算法进行比较,文献[6]中算法简记为MUSIC-PF.
实验结果为500次Monte-Carlo实验的平均数据,分别采用均方根误差(RMSE)和归一化均方根误差(NRMSE)作为角度(方位角和俯仰角)和距离的估计精度衡量指标。
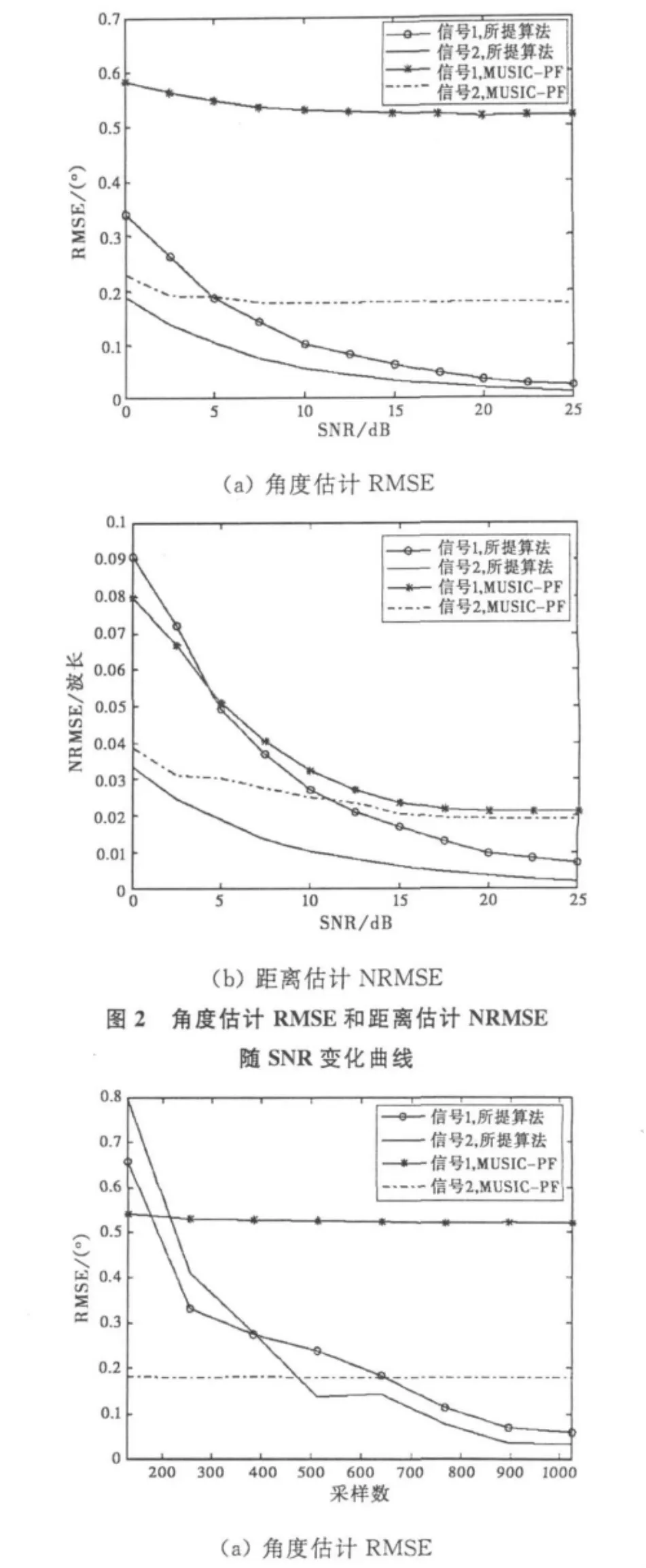
仿真1 研究信噪比(SNR)对波达参数估计精度的影响。源信号选为si(t)=exp(j(0.2πt+φi)),其中φi为[0,2π]内的均匀分布,φi间相互独立。均匀圆阵由13个阵元组成,圆阵半径R=λ,相邻阵元间距约为0.48λ.两个源信号的波达参数分别为(2.5R,30°,45°)和 (3R,50°,70°),采样数为 1024。SNR从5dB变化到25dB时,角度估计RMSE和距离估计NRMSE随SNR的变化曲线如图2所示。MUSIC-PF算法中,二维MUSIC算法搜索步长为0.05°.
由图2可以看到,无论是角度估计还是距离估计,本文算法性能都要优于MUSIC-PF算法。原因主要有两个:一是MUSIC-PF算法方位角估计误差相对较大,进而影响距离和俯仰角估计精度;二是本文算法为高阶累积量算法,它能抑制高斯白噪声。
仿真2 考虑采样数对参数估计精度的影响。仿真条件同仿真1,SNR=15dB,采样数从128变化到1024。图3为本文算法和MUSIC-PF算法参数估计性能随采样数的变化曲线。由图3可以看到,MUSIC-PF算法对采样数不是很敏感。当采样数较少时,本文算法性能比 MUSIC-PF算法差,而当采样数较多时,情况则正好相反。主要原因在于MUSIC-PF算法利用的是二阶统计量,它对采样数不是非常敏感。而本文采用的四阶累积量虽然能抑制高斯白噪声,但是它对采样数比较敏感。
4.结 论
基于均匀圆阵,提出了一种基于高阶累积量的近场源距离-方位角-俯仰角估计算法。首先利用阵元接收数据构造一组高阶累积量矩阵,通过矩阵联合对角化技术得到阵列流形矩阵的估计。再利用近场和远场情形方位角相同的结论,得到方位角的估计。最后利用估计得到的阵列流形矩阵及方位角,得到距离和俯仰角的估计。为提高估计精度,利用非线性最小二乘重新估计波达参数。与文献[6]中算法相比,本文算法无需进行二维频域搜索,且在采样数比较多时参数估计精度更高。本文算法的高估计性能代价是计算量比较大,主要是由于高阶累积量计算及矩阵联合对角化。
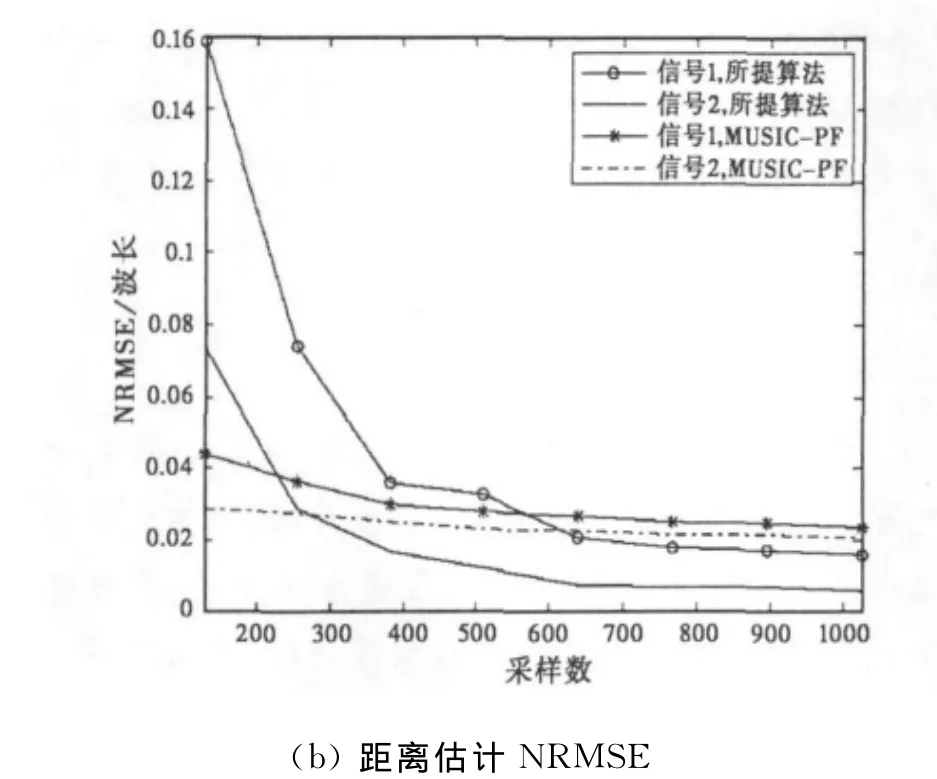
图3 角度估计RMSE和距离估计NRMSE随采样数变化曲线
[1]MATHEWS C P,ZOLTOWSKI M D.Eigenstructure techniques for 2-D angle estimation with uniform circular arrays [J].IEEE Transactions on Signal Processing,1994,42(9):2395-2407.
[2]陶建武,石要武,常文秀.一般阵列误差情况下信号二维方向角估计 [J].电波科学学报,2006,21(4):606-611.
TAO Jianwu,SHI Yaowu,CHANG Wenxiu.Estimation of 2Dangle for signals with general array error[J].Chinese Journal of Radio Science,2006,21(4):606-611.
[3]熊维族.一种盲的多个分布源到达方向估计算法[J].电波科学学报,2008,23(5):942-945.
XIONG Weizu.A blind DOA estimation algorithm for multiple spread sources[J].Chinese Journal of Radio Science,2008,23(5):942-945.
[4]YE Z,XIANG L,XU X.DOA estimation with circular array via spatial averaging algorithm [J].IEEE Antennas Wireless Propagation Letters,2007,6(1):74-76.
[5]HOOLE P R P.Smart Antennas and Signal Processing for Communications,Biomedical and Radar Systems[M].Southampton:WIT Press,2001.
[6]LEE J H,PARK D H,PARK G T,et al.Algebraic path-following algorithm for localizing 3-D near-field sources in uniform circular array [J].Electronics Letters,2003,39(17):1283-1285.
[7]MENDEL J M.Tutorial on high order statistics(spectra)in signal processing and system theory:theoretical results and some applications[C]∥ Proc.of IEEE,1991,79(3):278-305.
[8]DOGAN M C,MENDEL J M.Application of cumulants to array processing part II:non-Gaussian noise suppression[J].IEEE Transactions on Signal Processing,1995,43(7):1663-1676.
[9]周 祎,冯大政,刘建强.基于联合对角化的近场源参数估计 [J].电子与信息学报,2006,28(10):1766-1769.
ZHOU Yi,FENG Dazhen,LIU Jianqiang.Parameter estimation of near field sources using joint diagonalization[J].Journal of Electronics and Information Technology,2006,28(10):1766-1769.
[10]夏铁骑,万 群,游志军,等.冲击噪声环境中的联合对角化波达方向矩阵法 [J].电波科学学报,2008,23(3):460-465.
XIA Tieqi,WAN Qun,YOU Zhijun,et al.Joint diagonalization DOA matrix method in impulsive noise environments[J].Chinese Journal of Radio Science,2008,23(3):460-465.
[11]LI X L,ZHANG X D.Nonorthogonal joint diagonalization free of degenerate solution[J].IEEE Transactions on Signal Processing,2007,55(5):1803-1814.
[12]NOCEDAL J,WRIGHT S J.Numerical Optimization[M].New York:Springer-Verlag Press,1999:250-275.