基于模糊 PID 双闭环矢量控制的井下电机车精准停车方法研究
2022-09-20史志远黄保胜马驰
史志远,黄保胜,马驰
1安标国家矿用产品安全标志中心有限公司 北京 100013
2中国矿业大学 江苏徐州 221008
电机车运输不仅是煤矿辅助运输系统中的重要组成部分,还是辅助开采设备正常生产、提高生产效率的重要手段[1-3]。电机车的停车精度是评价煤矿井下自动化程度的重要指标之一。当前电机车停车主要依赖司机的驾驶经验,效率低,精度差,严重影响煤矿井下自动化运输的效率,不利于实现煤矿辅助运输的自动化与智能化[4]。此外,煤矿井下工况较复杂,不同的速度、停车距离、坡度和载重都会影响电机车的实际制动力和司机的停车操作。因此,研究有效的电机车精准停车方法,提高电机车停车的精准性,对提高煤矿井下的辅助运输效率和实现自动化生产具有重要意义,也是未来智慧煤矿的发展趋势[5]。
与直流电动机、异步电动机和开关磁阻电动机相比,永磁同步电动机具有以下特点:①体积小;② 可靠性高;③功率密度大;④ 噪声小、温升低[6]。采用永磁同步电动机的电机车安全性和节能效果较好[7-8]。
下面笔者对采用永磁同步电动机驱动的煤矿井下电机车的精准停车方法进行研究,实现电机车在不同速度、停车距离、坡度和载重工况下的精准停车。
1 电机车精准停车的动力学模型建立与过程分析
电机车行驶时,主动轮的受力如图 1 所示。作用于车轮上的驱动力
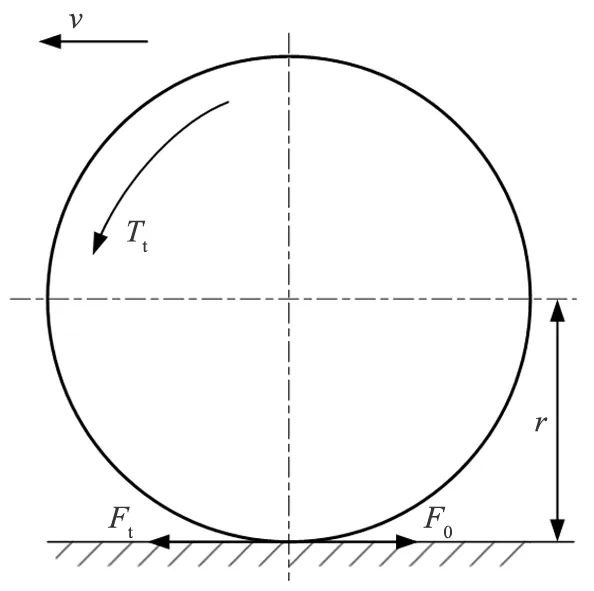
图1 电机车驱动轮受力示意Fig.1 Sketch of force on driving wheel of locomotive
电机车在行驶时,受到空气阻力、滚动阻力、坡度阻力和加速阻力作用。车轮受到的与电机车速度方向相反的阻力为滚动阻力。滚动阻力

式中:G为电机车所受重力;f为轨道的滚动阻力系数;α为轨道倾角。
电机车行驶时,会受到空气阻力Fw的作用,如图 2 所示。空气阻力Fw的大小与电机车行驶速度的二次方成正比,
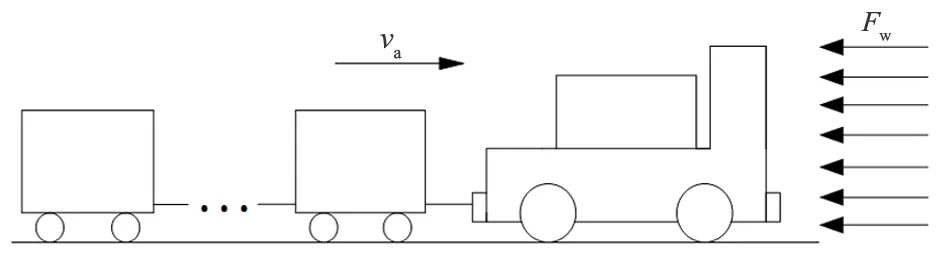
图2 电机车空气阻力示意Fig.2 Sketch of air resistance onto locomotive
式中:CD为空气阻力系数;A为正投影面积;va为行驶速度。
电机车的坡度阻力如图 3 所示。坡度阻力
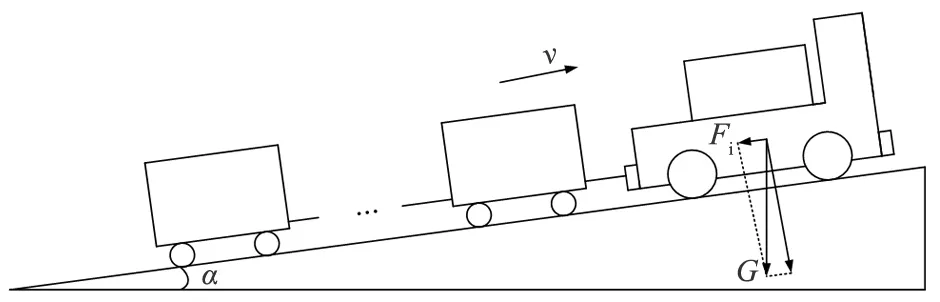
图3 电机车的坡度阻力示意Fig.3 Sketch of slope resistance onto locomotive

电机车减速行驶时,会受到加速阻力。电机车的加速阻力

式中:δ为旋转质量换算系数;m为电机车质量;a为加速度。
根据式 (1)~ (5),可得
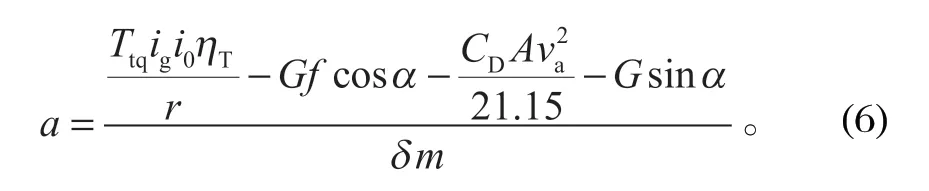
因现场工况较复杂,为了减小误差,提高电机车精准停车过程中的抗干扰能力,电机车分阶段做末速度为零的匀减速直线运动,其加速度

电机车精准停车过程解析如图 4 所示。

图4 电机车精准停车过程解析Fig.4 Analysis on precise halting process of locomotive
t0~tn的间隔时间相同。0~t0期间,电机车的速度从零开始加速,一直加速到速度v0(v0为现场电机车开始精准停车时的行驶速度)。在t0时刻,电机车开始精准停车,此时电机车的速度为v0,离终点的距离为x0,电机车的加速度为a0。在t1时刻,电机车走过的距离为x1,电机车离终点的距离为x0-x1,速度为v1,加速度为a1。在t2时刻,电机车走过的距离为x2,离终点距离为x0-x2,速度为v2,加速度为a2。精准停车进程中,每隔一段时间,都根据当前的速度和离终点距离,调整电机车的加速度,直至速度为零,精准停车结束。
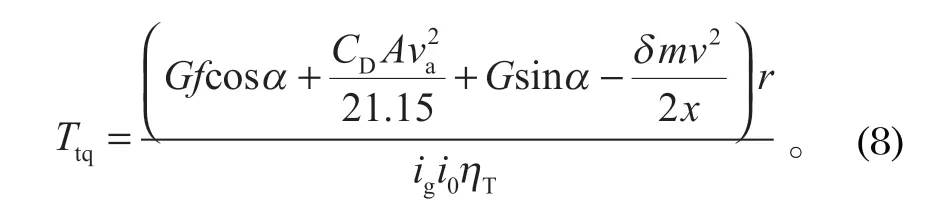
停车过程中,要控制永磁同步电动机输出对应的制动力矩,从而控制电机车按照预定的加速度行驶,需要得到不同工况下电动机输出力矩的计算公式。不同工况下电机车永磁同步电动机需要输出的制动力矩
电机车精准停车过程如图 5 所示。电机车精准停车过程中,每隔 1 s 就根据当前速度、距离等参数校正电动机输出的制动力矩,按照末速度为零重新计算需要的减速度值,以提高不同工况下电机车的停车精度。
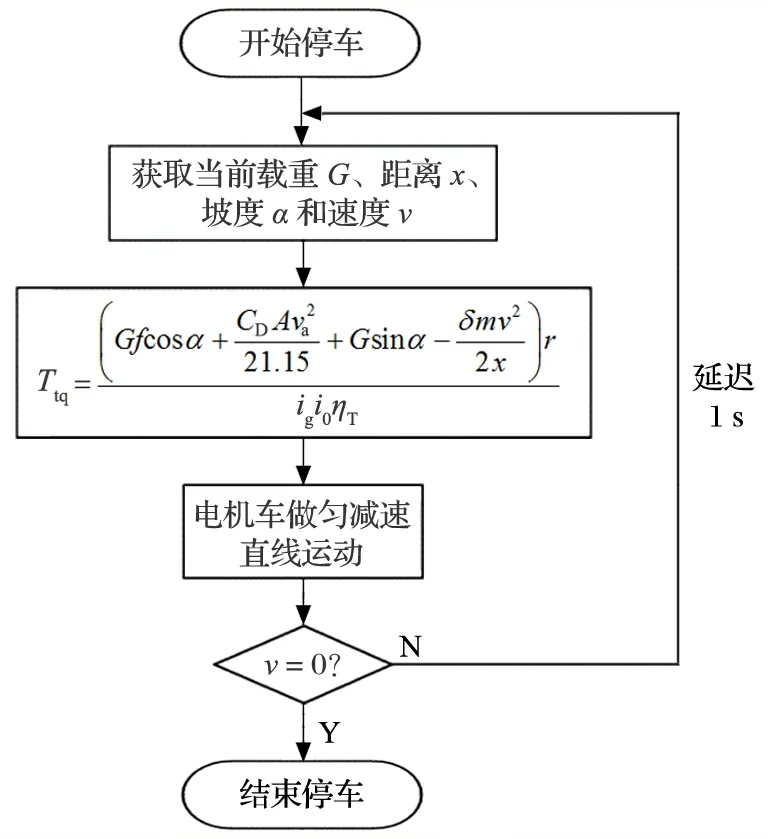
图5 电机车精准停车流程Fig.5 Process flow of precise halting of locomotive
2 永磁同步电动机控制策略研究
为了控制永磁同步电动机输出对应的制动力矩,实现精准停车,建立永磁同步电动机的双闭环模糊PID 控制系统,得到精准停车时永磁同步电动机的控制策略。
三相永磁同步电动机输出力矩

结合式 (8) 与 (9),可得

式(10) 可以转化为
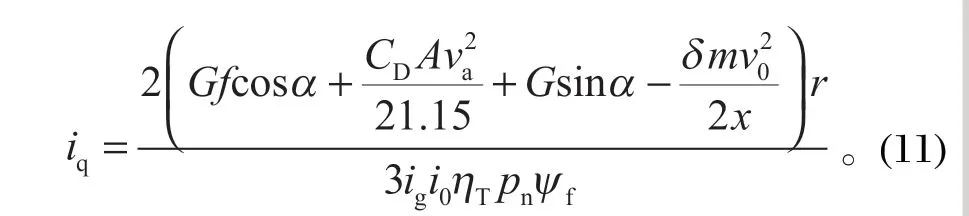
由式 (11) 可知,可以通过控制电动机的 q 轴电流iq来控制永磁同步电动机输出的制动力矩,结合精准停车方法,实现煤矿井下电机车在不同初始速度、停车距离、坡度和载重下的精准停车。
采用转矩环和电流环的双闭环矢量控制系统 (见图 6) 控制永磁同步电动机,以提高控制的精确性,减小停车误差。该系统根据当前速度、距离、坡度和载重等,计算出永磁同步电动机应产生的给定转矩Te*,然后对比Te* 和实际转矩Te,经PID 调节器处理后控制 q 轴电流iq,同时控制电动机的 d 轴电流id=0,d 轴和 q 轴的电流经过变换,通过 SVPWM 控制逆变器输出 3 路 PWM 信号,生成正弦波,最后合成矢量,驱动永磁同步电动机,实现精准停车。
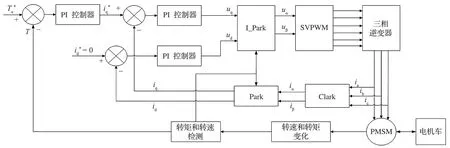
图6 永磁同步电动机双闭环矢量控制系统Fig.6 Double closed-loop vector control system for PMSM
3 电机车精准停车系统建模与仿真分析
基于动力学分析和永磁同步电动机双闭环矢量控制原理分析,用Simulink 建立电机车精准停车的仿真系统,包括电动机控制仿真模型、电机车动力学仿真模型和驾驶员仿真模型等。
3.1 永磁同步电动机模糊 PID 双闭环矢量控制系统建模
根据永磁同步电动机矢量控制理论和模糊 PID 控制理论,搭建了永磁同步电动机的模糊 PID 双闭环矢量控制系统仿真模型,如图 7 所示。
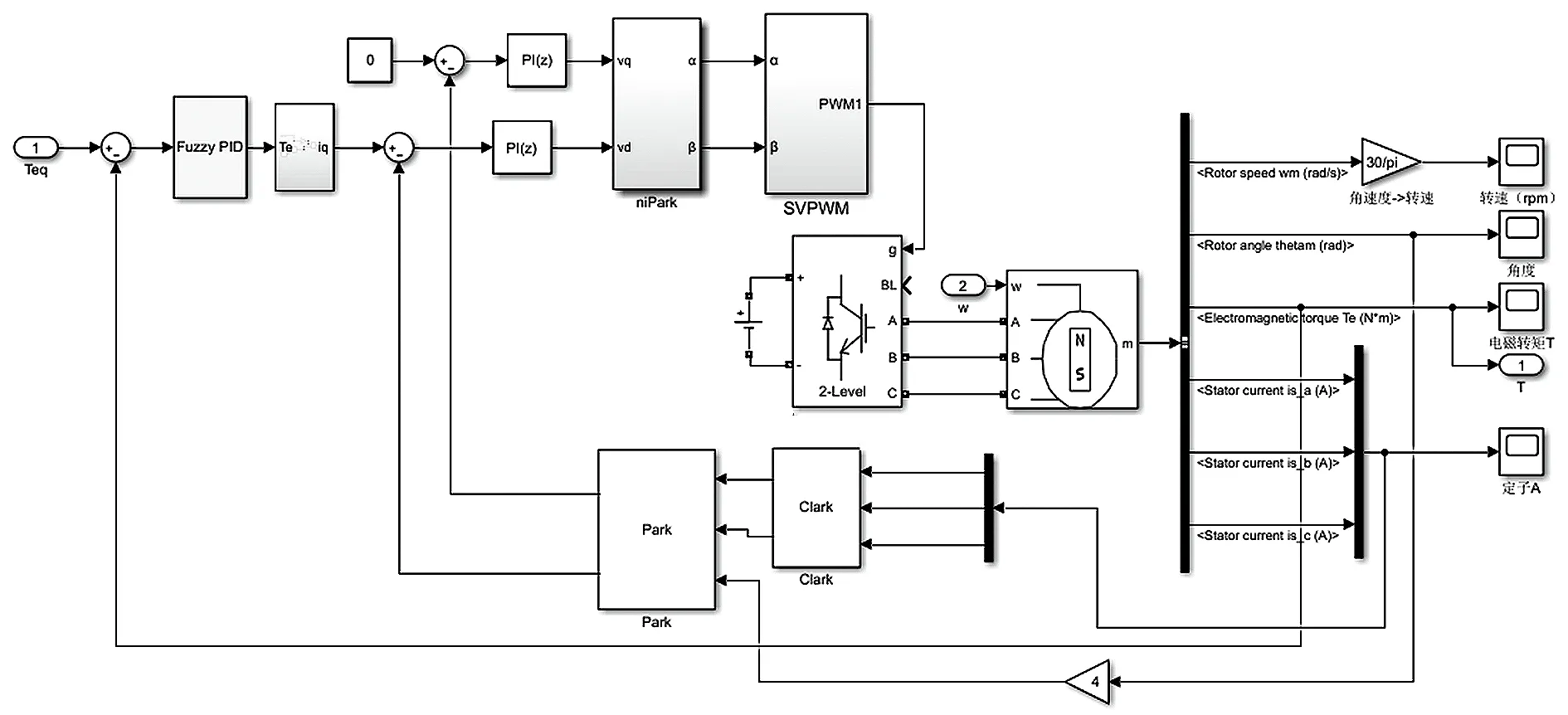
图7 永磁同步电动机模糊 PID 双闭环矢量控制系统仿真模型Fig.7 Simulation model of fuzzy PID double closed-loop vector control system for PMSM
3.2 仿真结果分析
仿真电机车加速到正常行驶速度,然后控制电机车减速,评估电机车减速时行驶的距离与实际给定距离的差值,以验证精准停车方法。
现场永磁同步电动机参数如下:电阻为 0.2 Ω,d-q 轴电感为 8.5 mH,磁链为 0.175 Wb,极对数为 4对。仿真时间为 35 s。初始时刻,永磁同步电动机产生驱动力矩,于t0时刻将电机车加速至速度v0;t0时刻之后,电动机根据当前速度和离终点距离,产生制动力矩对电机车进行制动,仿真系统记录仿真过程中永磁同步电动机的转矩、定子电流,电机车的加速度、速度以及路程等参数。
仿真工况如下:电机车停车前速度为 1.7 m/s,停车距离为 23 m,坡度为 1°,载重为 12 000 kg。
在第 0~ 5 s 期间,驾驶员控制永磁同步电动机输出驱动力矩,驱动电机车加速,在第 5 s 时加速到 1.7 m/s;第 5~ 35 s 期间,电机车进入精准停车状态,系统根据当前速度和离终点距离,控制电动机输出相应的制动力矩,使电机车进入分阶段的匀减速直线运动状态。每隔 1 s,系统根据当前速度和离终点距离,对永磁同步电动机输出的制动力矩进行校正,减小停车误差。永磁同步电动机的定子电流及电磁转矩的变化曲线分别如图 8、9 所示。第 0~ 5 s 期间,定子产生旋转磁场,控制电动机产生驱动力,驱动电机车加速,此时电动机输出驱动力矩;第 5 s 后,电机车达到设定速度v0,三相定子电流发生变化,电动机的电磁转矩转换为制动力矩,电机车进入精准停车状态。从图 8、9 可以看出第 5 s 前后电动机的定子电流和输出转矩的突变。

图8 永磁同步电动机定子电流变化曲线Fig.8 Variaton curve of rotor current of PMSM

图9 永磁同步电动机电磁转矩变化曲线Fig.9 Variation curve of electromagnetic torque of PMSM
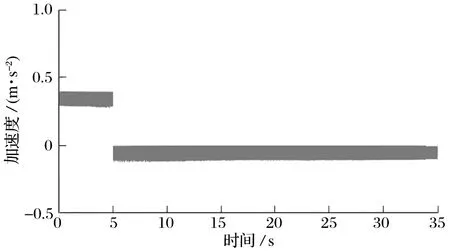
图10 电机车加速度变化曲线Fig.10 Variation curve of acceleration of locomotive
精准停车过程中电机车的加速度变化曲线如图10 所示。第 0~ 5 s 期间,电机车启动,电动机输出驱动力矩,此时加速度为正,电机车处于加速状态;第 5 s 时,电机车达到指定速度;第 5 s 后,随着永磁同步电动机输出转矩的变化,电机车的加速度变为负值,电机车处于分阶段的匀减速直线运动状态,直至速度为零。
电机车速度变化曲线如图 11 所示。仿真开始时,电机车的速度开始增加,直至速度达到 1.7 m/s,然后对电机车进行精准停车的仿真;第 5 s 后,速度逐渐下降,直至速度为零时,精准停车结束。

图11 电机车速度变化曲线Fig.11 Variation curve of speed of locomotive
对电机车的速度进行积分,得到电机车的位移变化曲线,如图 12 所示。第 0~ 5 s 期间,电机车处于加速状态,速度逐渐增加,此时电机车的位移曲线是一个斜率逐渐增大的抛物线,电机车从启动开始走过的距离为 3.97 m;第 5 s 后,电机车速度逐渐减小,曲线的斜率逐渐变小,直至速度为零,曲线停止变化,电机车停止运行,此时电机车走过的距离为26.92 m。第 5~ 35 s 期间为电机车精准停车的时间,电机车行驶的距离为 22.95 m,定位误差仅为 0.05 m。

图12 电机车位移变化曲线Fig.12 Variation curve of displacement of locomotive
4 结语
为了实现煤矿井下电机车的精准停车,构建了PID 模糊双闭环矢量控制系统,基于电机车当前速度、距离、坡度及载重等参数输出制动力矩,以实现精准停车。仿真结果表明本文所提出停车方法能够满足电机车的精准停车要求。
