汽车EPS系统助力控制策略实现研究
2011-06-02宋晓华
李 伟,宋晓华
(重庆交通大学机电与汽车工程学院,重庆 400074)
汽车转向系统经历了从传统的机械式转向系统(MS)到液压动力转向系统(HPS)的发展阶段。随着嵌入式系统技术、传感器技术和现代控制技术的发展,采用新型传感器和电子控制的电控液压动力转向系统(EHPS)、电动助力转向系统(EPS)已经成为部分车型的标准装备。随着对汽车各项性能要求的不断提高,对汽车转向系统的性能要求也越来越高,不仅要求低速和驻车时的转向轻便性,同时也要求汽车高速行驶时的操纵稳定性,然而传统方式的转向系统都不能同时满足低速行驶转向轻便性和高速行驶操纵稳定性的要求。目前在汽车电子方面的热门研究课题“电动助力转向系统”可以解决汽车转向“轻与灵”的矛盾。此系统是根据转向盘上的传感器输出的转矩信号和测量的车速信号确定助力电机的目标转矩值,并通过闭环控制策略使电机施加在转向轴上的助力转矩大小快速跟随目标转矩值,达到电机为转向器转向提供助力的目的。
1 EPS控制系统组成
EPS控制系统主要由MSC1210控制器、传感器信号采集电路及信号调理电路、电机双H桥驱动电路等组成,结构如图1所示。

图1 ECU控制系统总体框图
1.1 微控制器
微控制器采用MSC1210芯片,它拥有ADC高精度微位移传感器电路模块,能完成微弱信号8通道多路切换、信号缓冲、PGA编程放大、24位ΣΔA/D转换、数字滤波、数据处理、信号校准以及UART通信等功能。MSC1210内部集成有最大32 kB的Flash存储器。该Flash可分区使用,分别划分为程序存储区和数据存储区,支持在系统编程(ISP),可擦写/编程10万次,数据保存时间可达100年。MSC1210还提供了双数据指针(DPTR),可以加速整块数据的移动。每个指令周期只包含4个时钟周期,在访问外部数据存储器时,还可以使访问周期延展2~9个指令周期,以适应不同的外设速度。
1.2 扭矩传感器
扭矩传感器是电动助力转向系统中的一个重要部件,它将测量的驾驶员转向盘转矩和方向盘转角传给ECU,通过扭杆将转向盘和转向器连接起来,建模时将它与转向盘合为一体进行力学分析。在电动助力转向器提供转向助力的状态下,微型车转向盘转矩应在5 N·m以下才能够满足轻便性的要求,因此选定测量范围在10 N·m左右的传感器。传感器和信号调理电路在该范围内进行了多次重复标定,其输出电压-转矩如图2所示[1]。

图2 传感器主、副转矩输出电压-转矩
用最小二乘法对图2中的主转矩信号数据进行线性拟合,得到主转矩信号 VA和转矩 Td的关系

根据式(1)可得

同时计算得其非线性误差为±3.64%,主转矩信号迟滞为 ±0.48%,主转矩信号重复性为±0.52%,以上3项误差求和后作为主转矩信号的误差,由此可得其精度为4.64%。从这个指标可以得知,所选的传感器基本满足EPS系统的要求[1]。
2 EPS控制系统的控制策略
EPS控制系统的控制策略算法由电机助力大小控制策略和电机转矩大小控制策略2部分组成。电机助力大小控制是根据驾驶员对方向盘施加的转矩大小和车速测定模块测定的车速大小来确定电机助力的目标转矩;电机转矩控制是根据有相应的控制策略计算出的电机目标转矩值与电机实际输出的转矩值进行比较,将两者之间的差量作为直接控制对象进行闭环控制。
2.1 电机助力大小控制算法
电机助力大小控制算法是控制系统根据驾驶员施加在方向盘和转向系上的转矩和当时测定出的车速大小,按照预先设定的助力特性曲线确定出电机助力的目标转矩值。本系统选用的是折线型的助力特性曲线,该助力特性曲线可用式(3)表示。

Td0取值大小与驾驶员主观感受有关系,事先可以根据设计者和驾驶员对转向系统轻便性和路感的具体要求,通过试验来综合确定。参考有关资料,初步取Td0=1.0 N。当车辆动力转向时,驾驶员作用在转向系方向盘上的切向力应在20~50 N,设定驾驶员作用在转向盘上的最大切向力为28 N,根据文献[2]确定 Tdmax为5.0 N·m。
2.2 助力电机闭环控制算法
本课题采用永磁式直流电动机。如图3所示,助力电机端电压U与电感L、电枢电阻R、反电动势常数Ke、转速θm、电流大小I和时间t之间的关系为


图3 电机等效电路
由于电流稳定时,电感作用很小,此方程可改变为

电动机产生的电磁转矩与电枢电流I和气隙磁通φ有如下规律:

式中:Ka为电动机的转矩系数(N·m·A-1);Tm为电机输出转矩;Kf为励磁系数;if为励磁电流;Ka为电枢系数;I为电枢绕组电流。Kf·if·Ka用Ka来代替,称Ka为电磁转矩系数,这样直流电机输出转矩
对电动机机械部分进行受力分析,可以得到

式中:Im为电动机和离合器的转动惯量(kg/m2);Bm为电动机黏性阻尼系数(N·m·rad/s);θm为电动机的转角(rad);Tm为电动机电磁转矩(N·m);Ta为电动机输出转矩(N·m)。
在实际的控制系统中,电动机助力转矩Ta可以表示为

式中Km为电动机和减速机构的输出轴刚性系数(N·m/rad)。
本课题采用了PD算法的电流控制方法控制电机转矩大小,将按照电机助力特性曲线确定的电机目标转矩直接转换成电机目标电流,再与电流传感器测得的电机实际电流相比较,求其差值作为控制量,通过PD控制算法对其进行比例和微分修正,通过反馈环节构成闭环控制,再通过控制算法获得控制驱动电路的脉宽调制信号。与常规的PID控制算法相比,积分部分对电机电流控制影响很小,可忽略。
2.3 控制算法流程
电动助力转向控制系统控制算法的主程序主要具有状态参数初始化,系统外部信号(转向盘转矩信号、车速信号和电机电流信号)采集,根据程序预设方案计算电机目标电流,与反馈电机电流值比较确定控制量大小,通过PD算法得到控制电机的PWM斩波信号等功能。
本文电动助力转向系统在软件实现方面的思想是使用多任务分时调用控制策略,利用计数器定时,设置单个任务执行时间,定时时间到后,程序自动进入中断服务子程序,根据PID变量的值,可进入不同的子程序执行,每中断一次可执行一次其中一个子程序,这样就实现了多任务的分时调用,并且可实时地更新全局变量值,不需要子程序与主程序之间的变量互传。控制系统主程序流程框图如图4所示。
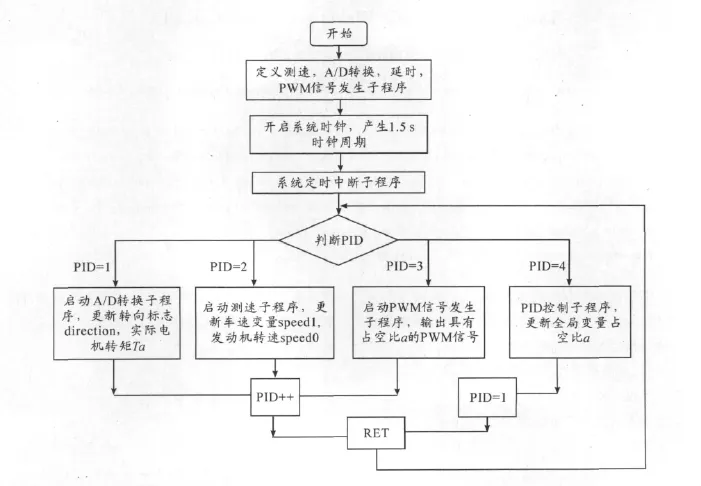
图4 主程序流程框图
3 结束语
本文提出了一种电动助力转向控制系统利用定时器的定时功能实现多任务分时调用的控制方法,定时器每中断一次就执行一次相应的子程序,使不同任务循环定时执行。该方案易于实现,并且保证了转向控制系统具有很好的实时性和转向跟踪性。
[1]周波.汽车电动助力转向系统霍尔转角传感器[J].重庆理工大学学报:自然科学版,2010(2):21-23.
[2]钱学武,马明星,徐国民,等.电动助力转向系统建模及仿真[J].重庆理工大学学报:自然科学版,2010(2):14-17.
[3]季学武,刘学,孙凌玉.电动助力转向系统电感式转矩传感器的研究[J].传感器世界,2007(2):11-13.
[4]左波.电动助力转向系统助力特性研究[D].武汉:武汉理工大学,2009.
[5]黄李琴.汽车电动助力转向控制系统的初步研究[J].汽车技术,2003(6):3 -6.
[6]陶永华.新型PID控制及应用[M].北京:机械工业出版社,2001.
[7]高明,朱懿韬,许南绍.基于转向盘转动速度变转矩控制的电动助力转向系统[J].重庆工学院学报:自然科学版,2009(2):7-12.
[8]史剑宗,王小青,许南绍.电动助力转向系统控制策略[J].重庆工学院学报:自然科学版,2009(1):15-18.
