异步电机的参数辨识与矢量控制
2011-03-26张俊华
张俊华
(杭州电子科技大学智能控制与机器人研究所,浙江杭州310018)
0 引言
异步电机矢量控制技术由于其能够获得与直流电机相媲美的控制性能而在交流调速系统中得到了广泛的运用[1,2],而矢量控制系统的静动态性能很大程度上受到异步电机参数的影响[3],所以参数辨识或估计以获得更准确的参数对矢量控制系统来说是必不可少的[4,5]。本文利用变频器自身资源进行参数辨识不仅可以获得较为准确的参数,而且不需要额外的设备,简单易行。通过仿真估算参数并且运用到矢量控制中,表明估算方法是可行有效的。
1 参数辨识基本原理
通过变频器输入特定的激励信号,根据相应辨识参数。在矢量控制中,一般需要辨识的参数有定子电阻Rs、转子电阻Rr、定转子漏感Ls和Lr、互感Lm等,异步电机的T型等效电路是参数辨识的重要依据,T型等效电路以及逆变器的桥式电路如图1、2所示。
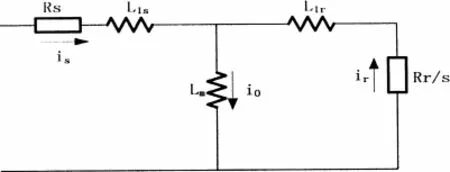
图1 异步电机T型等效电路
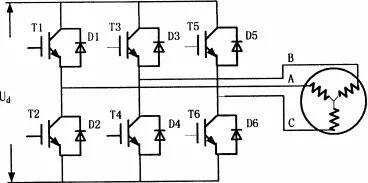
图2 逆变器桥式电路
1.1 定子电阻辨识
定子电阻可以通过直流试验来辨识,在T1桥臂施加直流方波信号,T4,T6桥臂处于一直接通状态,其他桥臂关断。等效电路如图3所示,可知:

式中,Rs为定子电阻。
1.2 漏感与转子电阻辨识
漏感与转子电阻辨识一般采用单相试验,单相电不能使电机产生电磁转矩,首先将T5与T6桥臂关断,在整个正弦周期内,让T1、T2和T3、T4互补导通,构成H桥的单向电路。由等效电路图4所示,可知:
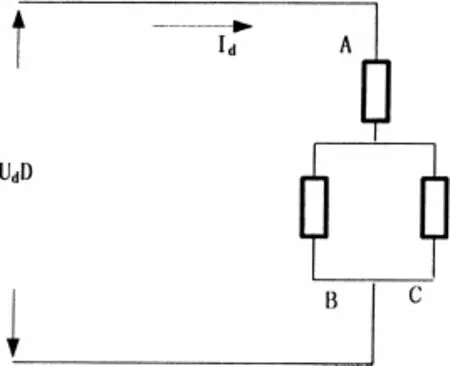
图3 直流试验等效电路
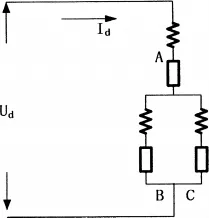
图4 单相交流试验等效电路

式中,Ze为等效阻抗,Re为等效电阻,Xe为等效电抗,L1s、L1r为定转子漏感,Rr为转子电阻,φ为功率因素角。
1.3 互感辨识
互感辨识一般是通过空载试验完成的。当电机处在空载运行时,电机转速基本上接近同步转速,转差率约为0,电机转子回路相当于开路,此时电机参数的等效估算如下:

式中,Ze为等效阻抗,Xe为等效电抗,Lm为互感。
2 仿真实现
电机参数的设定值为:Rs=1.898Ω,Rr=1.45Ω,L1s=L1r=0.019 6H,Lm=0.187H。首先,进行电机的直流试验,对电机施加直流PWM电压,得到的电流电压仿真波形如图5、6所示。
根据式1计算得:Rs=1.899Ω。
然后,对电机施以单相交流电进行实验,得到脉冲信号与电流波形图,如图7所示。
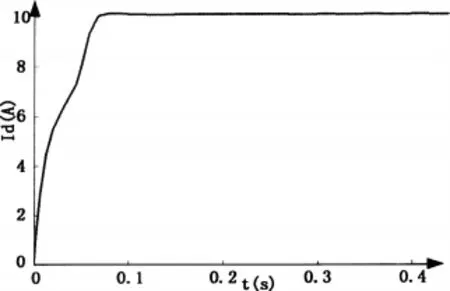
图5 电流仿真波形
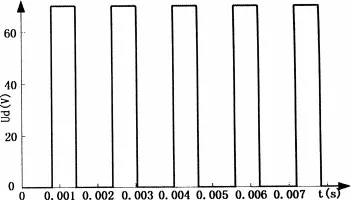
图6 电压仿真波形
根据仿真得到的电压与电流的值,经过傅里叶变换,得到电压的基波分量为Udc=184.7V,电流的基波分量为Id=7.6A,功率因素角φ=0.36,根据式3-6,得到L1s=L1r=0.019 35H,Rr=1.32Ω。
最后,进行空载试验,得到电流仿真波形如图8所示,计算电压、电流的基波分量,再根据式7-9,计算得Lm=0.193H。
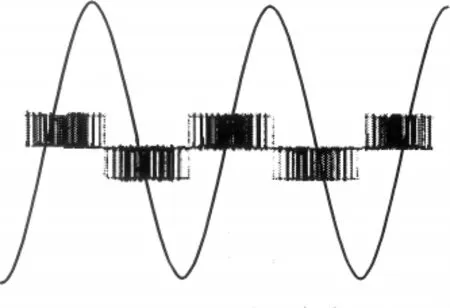
图7 脉冲信号与电流仿真波形图
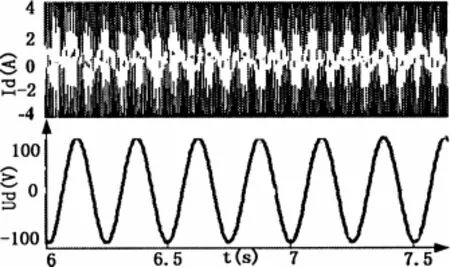
图8 电压与电流仿真波形图
3 参数的修正与检验
通过上面的仿真,易知除了转子电阻以外都获得了较为准确的估计值,而转子电阻达到了9%的误差。转子电阻是矢量控制运行中最重要的参数,它对于矢量控制的动静态性能都有很大的影响,它是矢量控制运行中需要修正的最主要参数,可以通过比较矢量控制中电压模型与电流模型的空间位置角进行实时修正转子电阻,来获得更好的控制性能。参数估计值在矢量控制系统的运行结构框图与仿真结果图如图9、10所示。
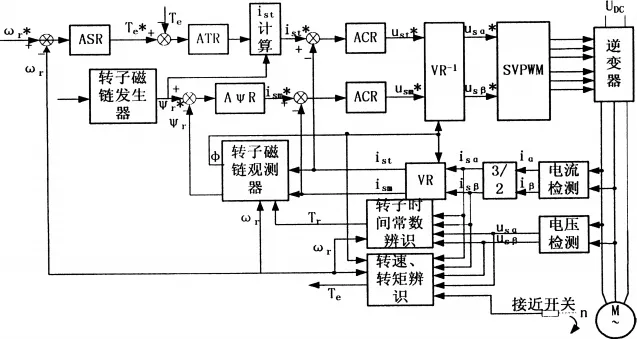
图9 带转子时间常数辨识的矢量控制结构框图
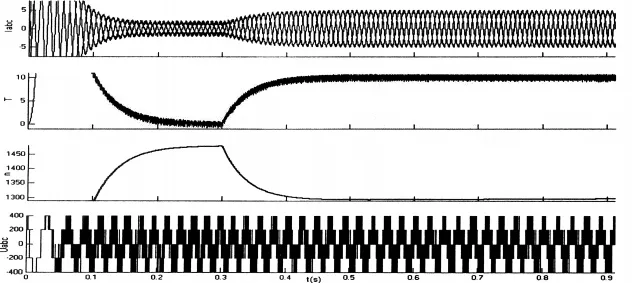
图10 矢量控制的各参数仿真波形
4 结束语
根据异步电机T型等效电路和各种试验,得到各个参数的等效计算公式,并通过matlab仿真来进行参数辨识,获得了较为准确的估计值,但是转子电阻的误差相对较大,可以通过矢量控制进行在线辨识,实时修正转子电阻,以获得更好的控制性能。
[1]马小亮.高性能变频调速机器典型控制系统[M].北京:机械工业出版社,2010:162-180.
[2]陈伯时.电力拖动自动控制系统-运动控制系统(第3版)[M].北京:机械工业出版社,2006:206-214.
[3]周箴,万淑芸,王离九.转子电阻变化对矢量控制的影响[J].电气自动化,1998,20(3):18-20.
[4]Lei Wang,Xianming Deng,Kun Hu.A Novel Parameter Identification Method for Induction Motor[C].Changsha China,2010 International Conference on Measuring Technology and Mechatronics Automation.2010:265-268.
[5]吴晓新,阮毅.异步电动机参数辨识方法的研究[J].南方纺织职业技术学院学报,2005,5(4):12-14.
