海面声探测多目标数据预处理算法
2011-03-26郭云飞赵宏薛安克
郭云飞,赵宏,薛安克
(杭州电子科技大学信息与控制研究所,浙江杭州310018)
0 引言
现代军事预警中,声探测是利用目标发出的声源信号来进行无源定位[1,2],对雷达探测系统起辅助预警作用[3]。但在复杂环境下,声探测系统对低空目标进行探测时,干扰因素很多,这对目标数据关联会产生一定的影响。针对海面杂波的特点,文献4建立了海情仿真的工程近似方法;在算法研究上,文献5提到了用多假设的方法来解决多目标数据关联;文献6以JPDA方法为基础,研究了一种杂波环境下的多目标跟踪算法;为了降低计算复杂度,提高在杂波中算法的鲁棒性,文献7提出了一种动态联合最近邻算法。针对海面声探测系统的几种不确定因素,本文在工程上提出了易于实现的海面声探测多目标数据预处理算法,利用方位角信息的变化率、相关性,采用拟合方式及最近邻原则处理目标关联问题,验证实测数据表明,该算法可解决杂波下多目标数据关联问题。
1 系统模型
(1)运动模型
离散时间的目标状态方程为:

式中,状态向量X(k)=[xkykvxvy]T,F(k+1,k)为系统k时刻到k+1时刻的状态转移矩阵,w(k)为过程噪声。

式中,T为采样时间间隔,Q(k)是系统过程噪声w( k)的对称非负定协方差矩阵。
(2)观测模型
在声探测网中,得到的量测是方位角信息。观测方程为:

式中,βi(k)表示k时刻第i个传感器得到的量测方位角,(x( k),y( k))表示k时刻的目标坐标,(xi,yi)表示第i个传感器的坐标,测量噪声ν(k)为零均值的高斯白噪声,对应的协方差矩阵为R(k)。
2 多目标数据预处理算法
2.1 航迹初始化
开始可用最近邻原则来初始化目标航迹,把声传感器上报的方位角信息分配给相应的航迹,当有新航迹形成时,保留原有航迹。
假设在第k次扫描之前有N条航迹,声传感器在每个扫描时刻能获得3个观测值,则第k次新观测值为:

式中,βi1,βi2,βi3分别表示第i个传感器得到的3个观测方位角。
在第m( m=1,2,…,N)条航迹的关联门内,观测Z( k)和航迹m的矢量差定义为测量值与预测值之间的差,即残差(k):

统计距离是判断哪个点迹与预测位置最近邻的度量标准,其定义如下:

式中,H为状态观测矩阵,S是Zij(k)的协方差矩阵。
2.2 预处理算法实现
航迹初始化后,若在k时刻有多个观测值落在统计距离d的范围内,目标数据就有可能关联错误。预处理算法则以方位角信息变化率、相关性,及观测方位角连续的特性,根据原有航迹历史信息,用最近邻原则比较预测的下一时刻观测值,来解决多目标关联问题。在这里,采用最小二乘法对目标数据进行曲线拟合的方法来进行预测,要在某个函数类Φ={φ0(x),φ1(x),…,φn(x)}中寻求一个“最好”的函数φ(x)来拟合目标数据。
对于给定航迹历史数据,在某个函数类Φ={φ0(x),φ1(x),…,φn(x)}中寻求一个函数:

用最小二乘法解决实际问题包含两个基本环节。先根据所给数据点的变化趋势与问题的实际背景确定函数类Φ,即确定φ(x)所具有的形式。然后根据最小二乘原则,求得最小二乘解,作为曲线拟合常用的一种情况,这里讨论的是代数多项式拟合,即取:

则得到法方程组为:

由式7,便可求得最小二乘解φ*(x),即确定其系数a(k=0,1,2,…,n)。
海面声探测多目标预处理算法流程步骤:第一步读取声传感器接收到的多目标原始数
据,存入数组矩阵并设置系统参数;第二步航迹初始,用拟合的方式及最近邻原则,解决多目标数据关联问题;第三步显示经过算法处理后的目标数据。
3 仿真和实验分析
3.1 数据产生场景
本次实验是利用海面声网络探测2个近似匀速直线飞行目标,声探测网络由3个传感器构成,传感器探测距离8km,测量误差为±7°,3个传感器的位置分别为S1(20 500 415,2 759 563)、S2(20 503 862,2 757 613)、S3(20 510 784,2 759 633),对应的修正角度分别为α1=1.4°、α2=2.2°、α3=0.8°,其中夹角定义为指北起点、逆时针旋转为正方向。声传感器采样周期为1s,且在同一时刻最多接收3个声源信号。
3.2 仿真及性能分析
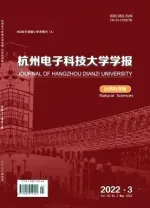
在海面背景下,传感器3探测到目标方位角,如图1所示。从图1可知,在海面电磁波等干扰下,产生强杂波、强噪声,对目标方位角信息影响比较大,如传感器3在60-100s内,目标信息波动大,不呈单调性,这就难以区分目标信息。
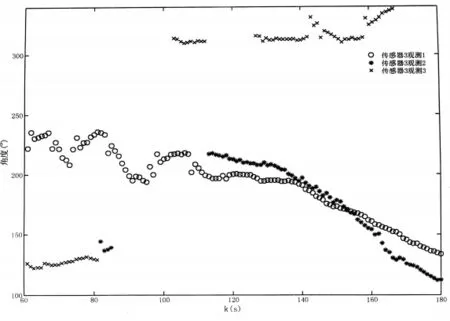
图1 目标方位角原始信息
对图1中传感器观测到的目标方位角信息,经算法处理后如图2所示,图2(a)包含显示经最近邻数据选择算法处理之后传感器识别出目标的数据,图2(b)显示经多目标数据预处理算法后传感器识别出目标的数据。
经过多目标数据预处理算法和最近邻数据选择算法处理后对比可知,两种算法都能有效地剔除海面复杂环境下的强杂波,当目标数据未出现在关联区域时,两种算法都能辨别目标,但目标数据出现在关联区域时,最近邻数据选择算法有时能关联正确,有时对目标航迹数据则关联错误,从图2(b)中的目标数据可知,多目标数据预处理算法能有效关联目标数据,效果良好。
4 结束语
考虑海面实际复杂情况,采用最近邻方法虽简单,但目标数据出现在关联区域时,就难以有效区分目标真实航迹,而基于最近邻方法的多目标数据预处理算法既能避免巨大的计算量,降低了算法的复杂度,同时也能解决目标数据关联问题,最后经实验仿真,算法效果良好,能适应工程需要。

图2 两种算法数据处理比较图
[1]Adamy D.Time of arrival emitter location[J].Journal of Electronic Defense,1995,(6):80-81.
[2]Adamy D.Radar Warning Receiver:The Digital Revolution[J].Journal of Electronic Defense,2000,(6):45-50.
[3]何友,修建娟.雷达数据处理及应用[M].北京:电子工业出版社,2006:42-89.
[4]夏祖勋.海面杂波的仿真[J].系统仿真学报,1992,4(4):52-57.
[5]韩崇昭,朱洪艳,段战胜,等.多源信息融合[M].北京:清华大学出版社,2006:290-310.
[6]李卫华,刘作良.一种杂波环境下的多目标跟踪算法[J].空军工程大学学报,2000,1(2):36-39.
[7]周武,赵春霞,张浩峰.动态联合最近邻算法[J].电子学报,2010,38(2):359-365.