电动汽车EPS系统阻尼工况Bang-Bang-PID控制
2011-02-10赵景波周冰贝绍轶
赵景波, 周冰, 贝绍轶
(1.江苏技术师范学院机械与汽车工程学院,江苏常州 213001;
2.江苏技术师范学院计算机工程学院,江苏常州 213001)
0 引言
电动汽车产业是国家战略性新兴产业之一,具有低碳、清洁、低耗等环保节能的显著特性。在汽车高速直线行驶(死区范围内)时,电动助力转向(electric power steering,EPS)系统会出现以下问题[1]:由于回正力矩较大,回正力矩往往克服系统的固有惯性和摩擦,导致转向过于灵敏,在中位附近产生抖动;由于路面的偶然冲击及干扰引起侧向加速度的突变,传到方向盘上的力矩比较大,引起驾驶员长时间的疲劳冲击,造成紧张和疲劳;由于电动机惯量的存在,EPS系统的惯量比传统转向系的惯量要大,当快速旋转转向盘时,转向盘的瞬时角速度很大,电动机的输出转矩也很大,转向盘不再旋转后,由于惯性作用电动机仍将继续转动,带动转向盘易造成汽车的过多转向。
EPS系统对阻尼控制提出以下要求[2]:汽车在高速直线行驶(死区范围内)时,转向盘的抖动是上述各方面共同作用、相互叠加引起的,其最终效果是引起转向盘转矩的不断变化,一方面可以通过驾驶员的驾驶行为来克服,但会造成驾驶员的驾驶疲劳;另一方面,可以使电动机输出反向转矩,起到阻尼的效果;阻尼控制在于衰减高速直线行驶时出现的方向盘抖动现象,消除转向车轮因路面输入引起的摆振现象,提高直线行驶稳定性和转向收敛性;阻尼控制倾向于提高转向的收敛性,即当转向盘停止动作时,电动机也要求相应地停止转动,这种快速跟随转向盘停转的性能可以使汽车高速行驶时的横摆角速度迅速收敛,改善高速时的转向稳定性;阻尼控制对系统性能的要求主要是响应速度,而对控制的精度要求相对较低。
1 系统动力学分析
1.1 EPS系统动力学分析
EPS系统的动态模型如图1所示。
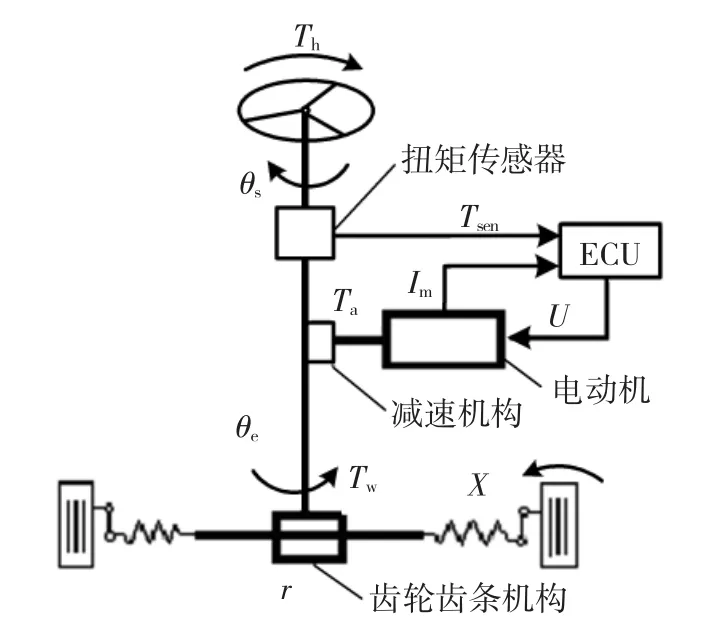
图1 EPS动态模型Fig.1 Dynamic model of EPS system

对EPS部件进行简化,根据各部件之间的相互约束关系,由牛顿运动定律建立各部分的动力学模型,并联立各模型,得到整个系统的模型[3]为式中:Js为转向盘、输入轴的转动惯量;Bs为输入轴粘性阻尼系数;θs为输入轴旋转角;Ks为扭杆的刚性系数;Th为作用在转向盘上的转向转矩;xr为齿条位移;rp为小齿轮半径;Jm为电动机和离合器的转动惯量;Bm为电动机粘性阻尼系数;θm为电动机转角;Tm为电动机电磁转矩;Kmr为电动机和减速机构的输出轴刚性系数;G为蜗轮-蜗杆减速机构减速比;Mr为减速机构、小齿轮和齿条等的当量质量;Br为减速机构、小齿轮和齿条等的当量阻尼系数;Kr为小齿轮、齿条和轮胎的等效刚度系数;xr为齿条位移;Fδ为路面的随机作用力。
建立EPS系统的状态方程为


1.2 汽车三自由度转向动力学分析
图2为汽车高速转向时的俯视图和后视图[4]。

图2 汽车三自由度转向模型Fig.2 Three degrees of freedom model of car

得到系统以X为状态变量的空间状态方程为
所以得到系统的状态方程为

系统的输出方程为

其中:状态变量为X=[γ β p φ]T;控制输入量为U=δT;输出量为Y=[γ β p φ]T;A=M-1E;B=M-1n。
式中:Mt为整车质量;Ms为悬架质量;Iz、Ix为整车绕Z、X轴的惯性矩;γ为车身的横摆角速度;Ixz为惯性积;Py1、Py2为前、后车轮侧向力;a、b为重心至前、后轴距;Cφ1、Cφ2为前、后悬架侧倾角刚度;Df、Dr为前、后悬架侧倾角阻尼;Ef、Er为前、后侧倾转向系数;2k1、2k2为前、后轮有效侧偏刚性;2N1、2N2为前、后回正力矩刚性;h为侧倾力臂;V为汽车速度;β为重心处的侧偏角;p为侧倾角速度。
上述模型中的主要参数为:整车整备质量Mt=900 kg;最大总质量Ms=1 330 kg;前轮轮距 a=1 360 mm;后轮轮距b=1 355 mm;整车绕Z轴转动惯量Iz=1 591.2 kg·m2;悬架上质量绕X轴的转动惯量Ix=293 kg·m2;前轮侧偏刚性2k1=35000 N/rad;后轮侧偏刚性2k2=35 000 N/rad;侧倾力臂 h=0.5 m;电动机转矩系数CT=0.02 N·m/A;电动机的反电动势常数Kb=0.02 V·s/rad;助力机构传动比G=16.5;电动机电枢电阻R=0.1 Ω;电动机电感L=0.01 H;方向盘转动惯量Js=0.001 2 kg·m2;方向盘阻尼系数Bs=0.261 N·m·s/rad;扭杆刚性系数Ks=90 N·m/rad;小齿轮半径rp=0.007 8 m;电动机转动惯量Jm=0.000 47 kg·m2;电动机阻尼系数Bm=0.003 34 N·m·s/rad;电动机输出轴刚性系数Km=90 N·m/rad。
2 Bang-Bang-PID控制设计及仿真分析
根据图2,EPS系统电动机的运行特性为

式(6)描述了电动机电枢电压为零时的电动机转速对电动机输出转矩的影响关系,电动机的转速与电动机输出转矩具有成比例的关系;且转矩输出为负,表明此时的转矩输出为制动转矩。
当忽略电动机电枢电感及其感应电动势时,有

式(8)描述了电动机电枢端电压短路时输出转矩与电动机转速的关系,电动机的转速与电动机输出转矩具有成比例的关系;且转矩输出为负,表明此时的转矩输出为制动转矩。
通过以上分析,阻尼控制主要包括两个方面,一是阻尼目标电流的设计,二是阻尼目标电流的跟随,也就是使电动机输出合适的阻尼转矩。根据EPS系统的要求,一方面,EPS系统在阻尼控制时,要求电动机的输出转矩能够跟随车速而变化,即是快速随动系统,要求一定的实时性和控制精度,可以采用PID控制来达到目标;另一方面,在PID控制中,当阻尼目标电流和实际电流的偏差较大时,容易引起电动机的输出转矩较大,导致失去平衡,影响安全性;因此,系统应该对较大误差具有较快的抑制较大的转矩输出的能力;该问题属于典型最优控制问题中的最短时间问题。

图3 阻尼系数μ随车速uvehicle的变化规律Fig.3 Relation between μ and uvehicle

式中:ed=Id,m,t- Id,m为阻尼目标电流和实际电流的偏差,Id,m,t为目标阻尼转矩 Td,m,t对应的电枢电流;ed,max为阻尼目标电流和实际电流的偏差的最大值;Kd,PWM,m为对应 ed的 PWM 占空比;Kd,PWM,max为 ed,max对应的PWM占空比,即对应最大的电动机输出阻尼转矩。
分别在有控制和无控制情况下,将车速保持在80 km/h直线行驶状态,驾驶员把持住转向盘不动,在齿条处加入来自路面的幅值为100 N的周期性干扰阻力,分别在无控制和Bang-Bang-PID控制情况下进行仿真,结果如图5所示,阻尼控制效果比较如表1所示。
由于Bang-Bang控制具有响应速度快、过渡时间短等优点,设计Bang-Bang-PID控制算法,当偏差大于临界值时采用Bang-Bang控制,而当偏差小于临界值时采用PID控制,使之既利用Bang-Bang控制响应快速的优点,又利用PID控制精度高的优点[6-7]。
汽车EPS系统在阻尼控制结构如图4所示,其工作原理为:根据当前误差|ed|的大小,判断系统误差所在的运行状态,实时调整控制器结构;设置|ed|>ed,max时采用 Bang-Bang 控制,设置 |ed|≤ed,max时采用PID控制。Bang-Bang控制的实质是当系统误差|ed|> ed,max时,使误差减少为 ed,max所用时间最短的最优控制问题,其控制规则为
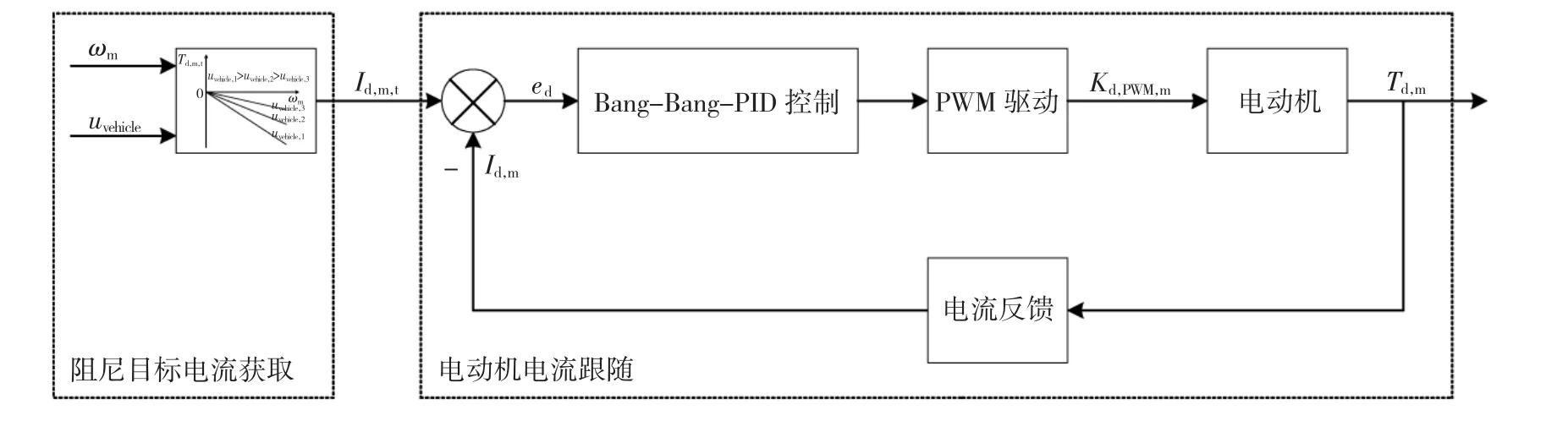
图4 EPS系统阻尼控制的Bang-Bang-PID控制算法Fig.4 Bang-Bang-PID control algorithm of damping control
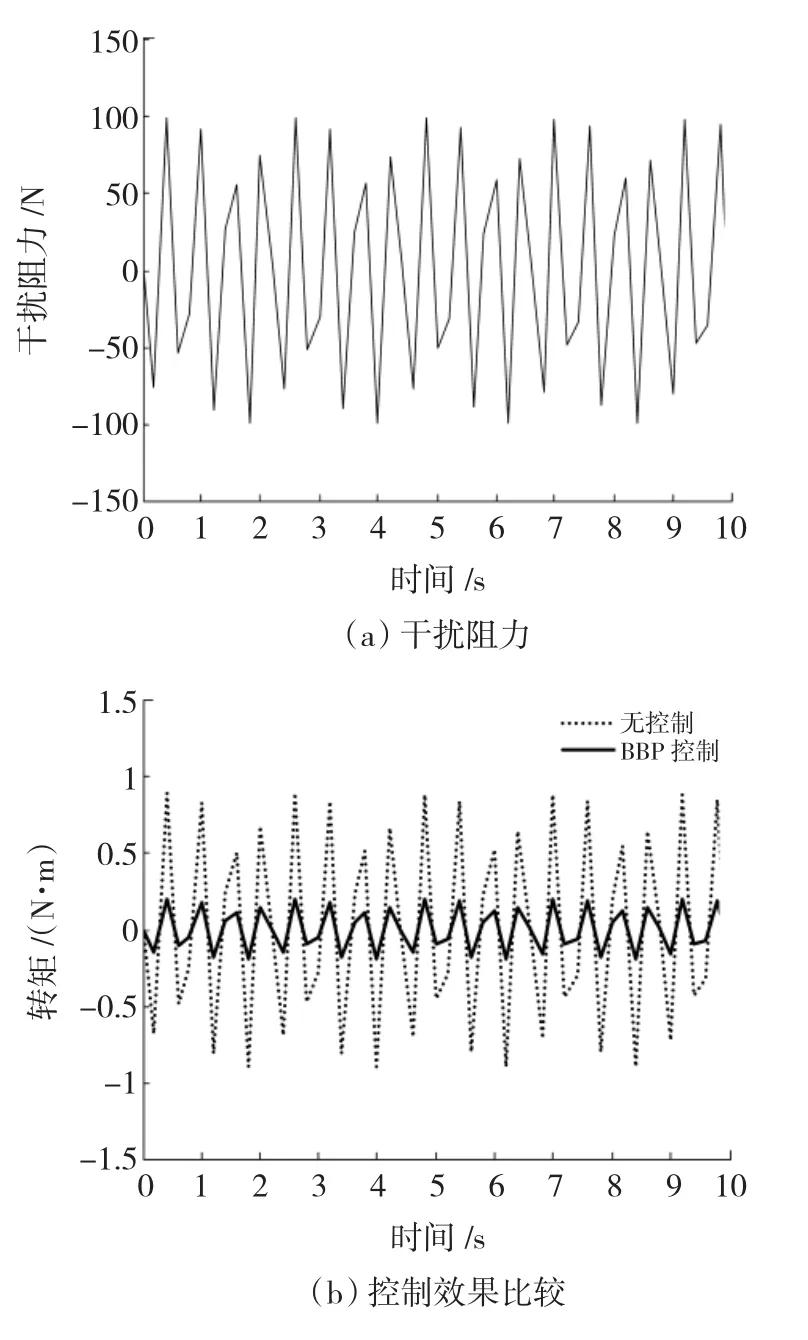
图5 阻尼控制比较Fig.5 Comparison under damping control

表1 阻尼控制效果比较Table 1 Effect comparison under damping control
结果表明,在无控制时,转向盘上的把持力矩幅值约为0.95 N·m,驾驶员对转向盘的抖动感觉明显,在Bang-Bang-PID控制时,转向盘上的把持力矩幅值约为0.25 N·m,驾驶员对转向盘的抖动感觉不明显,保证了系统具有更短的收敛速度和更强的抗干扰能力,提高了汽车的行驶稳定性。
3 实车试验设计及分析
以某微型轿车为试验对象,设计了汽车EPS系统实车试验平台,该平台主要由控制器系统、实车系统、传感器系统和数据采集与分析系统等组成[8]。
在80 km/h直线行驶状态下进行阻尼控制试验。试验方法如下:将车速保持在80 km/h直线行驶状态,驾驶员把持住转向盘不动,在无控制和Bang-Bang-PID控制情况下分别进行阻尼控制试验,测量数据为转向盘的转矩信号,该信号反映了转向盘的抖动情况,如图6和表2所示。
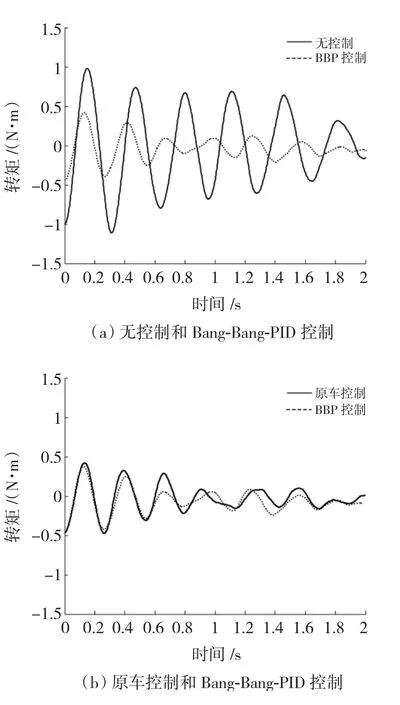
图6 阻尼控制试验对比Fig.6 Comparison under damping control test

表2 阻尼控制效果比较Table 2 Effect comparison under damping control test
结果表明,在阻尼控制试验中,在无控制时,转向盘上的把持力矩幅值约为0.91 N·m,驾驶员对转向盘的抖动感觉较明显,汽车转向盘转矩抖动只能够在自身惯性及摩擦的共同作用下自动地趋近于0,在经过2 s之后,约为0.2 N·m左右;在原车控制时,转向盘上的把持力矩幅值约为0.46 N·m,在经过0.7 s之后,开始进入0.2 N·m左右,此后,由于摩擦以及能量的转化,转向盘转矩抖动逐渐趋近于0。在Bang-Bang-PID控制时,转向盘上的把持力矩幅值约为0.39 N·m,汽车转向盘转矩抖动在电动机反向阻尼控制力、自身惯性及摩擦的共同作用下主动地趋近于0,在经过0.5 s之后,开始进入0.2 N·m左右,并逐渐趋近于0。与无控制相比,原车控制的最大把持力矩降低49.45%,Bang-Bang-PID控制的最大把持力矩降低57.14%;与原车控制相比,Bang-Bang-PID控制的最大把持力矩降低7.69%。
4 结论
1)EPS系统的阻尼控制对提高汽车高速行驶时横摆角速度的收敛河改善转向稳定性具有重要的作用,阻尼工况的控制对EPS系统控制策略的开发、功能的增强和优化以及转向操纵安全的提高都具有重要的工程应用意义。
2)EPS系统阻尼工况的Bang-Bang-PID控制可有效降低转向盘的把持力矩,减轻驾驶员对转向盘的抖动感觉,使系统具有更短的收敛速度和更强的抗干扰能力,提高汽车的行驶稳定性。
[1]ZHAO Jingbo,BEI Shaoyi,ZHANG Lanchun.On reverse control strategy and anti-wind disturbance analysis of automotive EPS system[J].Applied Mechanics and Materials,2011,39:529-534.
[2]赵景波.汽车EPS混杂控制系统理论、设计及实现研究[D].镇江:江苏大学汽车与交通工程学院,2009:105-107.
[3]TAKATSUKA Y,OHMAE K,YAMAGUCHI N,et al.Electric power steering control system:United States,6902028[P].2005-06-07.
[4]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991:295-305.
[5]冯引安.汽车电动助力转向系统建模及控制算法研究[D].重庆:重庆大学自动化学院,2007:33-35.
[6]李兵强,林辉.新型面装式永磁同步电机高性能控制技术[J].电机与控制学报,2010,14(2):1-6.
LI Bingqiang,LIN Hui.A novel high performance control method for surface-mounted permanent magnet synchronous motor[J].E-lectric Machines and Control,2010,14(2):1 -6.
[7]李义强,周惠兴,王先逵,等.直线电机伺服定位系统时间最优鲁棒控制[J].电机与控制学报,2011,15(3):13 -18.
LI Yiqiang,ZHOU Huixing,WANG Xiankui,et al.Robust time- optimal control of a linear motor positioning system[J].Electric Machines and Control,2011,15(3):13 -18.
[8] 《汽车工程手册》编辑委员会.汽车工程手册:试验篇[M].北京:人民交通出版社,2001:252-277.
(编辑:张诗阁)
