一种新型拖曳式诱饵技术研究*
2010-12-07郭颖睿任宏滨
郭颖睿,任宏滨,李 静
(空军工程大学导弹学院,陕西三原 713800)
0 引言
在美国对南斯拉夫的作战中,由于美国空军轰炸机使用了拖曳式有源诱饵,导致南联盟发射的10枚实际上已经跟踪到目标的地空导弹,最终却无法击中目标[1]。但是随着雷达抗干扰技术的发展,特别是雷达导引头抗角度欺骗能力的提升,使得诱饵发出的干扰信号已很难对雷达导引头形成有效干扰,因此对于拖曳式有源诱饵复合干扰技术的研究就显得尤为重要。
1 角度欺骗干扰
1.1 单脉冲测角[2]
主动雷达导引头多为脉冲多普勒雷达导引头,主要完成对目标的测角、测速和测距。角度信息是产生控制指令的主要制导信息,如果能够实现对导引头角跟踪系统有效干扰,那么将大大提高目标的生存概率。脉冲多普勒雷达导引头往往采用单脉冲测角体制。幅度和差单脉冲测角系统由4个天线向空间辐射4个具有对称分布的偏轴子波束;然后和差器对4个偏轴子波束接收的信号进行和差处理,获得和信号和差信号,其中差信号主要用于测角;和差信号经各自信道放大并归一化处理后,由相位检波器输出误差电压,以完成对目标角度的测量。
1.2 机载拖曳式诱饵
拖曳式诱饵在空中与目标信号一起形成双点源干扰,以达到对雷达导引头角度欺骗的目的。对于机载双点源干扰往往需要目标与干扰平台同处于雷达主波束内已形成对导引头角跟踪系统的欺骗。雷达导引头、目标和诱饵的空间几何关系如图1所示。

图1 雷达导引头、目标和诱饵的空间几何关系
目标T与诱饵S之间的距离为L,导引头天线等信号线方向与目标、诱饵之间的夹角分别为θ1、θ2,d为天线瞄准轴偏离等信号线的距离;R为雷达导引头距测量点的距离,Δθ(Δθ=θ1-θ2)为目标与诱饵对雷达导引头的张角。
当天线主波束内存在目标与诱饵两个信号时,可以得到跟踪天线指向角(天线瞄准轴相对于两干扰源中心线的偏离角)θ为:

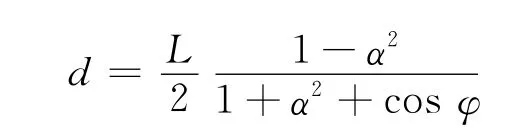
式中:φ为接收到的目标信号与诱饵信号之间的相位差;α为幅度比;通常取θ的实部为跟踪天线指向角。由于Δθ很小,又有L=ΔθR,sinθ=θ,偏移距离d为:

由上式得到偏离距离与相位差及幅度比的关系如图2所示。
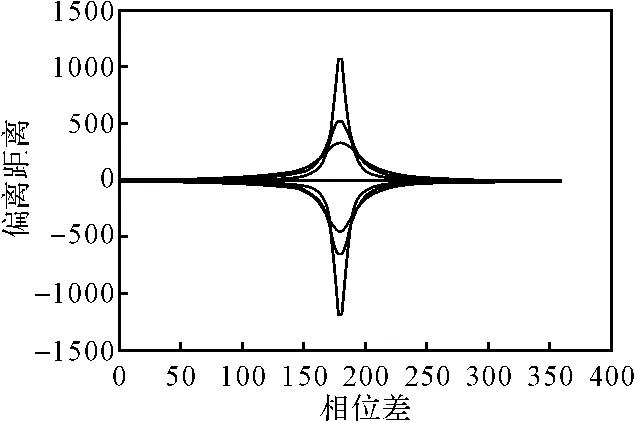
图2 偏离距离与相位差关系图
从图2可以看出当诱饵发出的干扰信号与目标回波信号相位差为180°时,干扰效果最好;当幅度比α<1时,天线瞄准轴偏向目标方向,当幅度比α>1时,天线瞄准轴偏向诱饵方向。
通过以上分析,对于相干两点源干扰而言,对干扰效果产生直接影响的是幅度比与相位差。由于幅度比的选择有限,因此通过相位差的调制可以增加双点源干扰的效果。
2 复合欺骗干扰
拖曳式诱饵能够与载机一起形成两点源干扰,对雷达导引头形成较好的角度欺骗;另外由于拖曳式诱饵其飞行速度与目标相同,使得雷达导引头无法在速度上对其进行分离。因此在使用拖曳式诱饵形成角度欺骗干扰的同时,结合速度欺骗干扰将可能会达到较好的干扰效果。
雷达导引头是靠接收目标多普勒频率进行速度跟踪,在双点源干扰中,雷达导引头接收到的信号是目标与干扰源的合成信号,要对雷达导引头的速度跟踪系统产生欺骗式干扰,就需对雷达导引头接收到的信号进行频率调制处理。对导引头速度跟踪系统进行欺骗干扰主要的手段是速度波门拖引技术,设计诱饵转发信号使其多普勒频率受速度门拖引,以达到相干相位差的变化,进而使天线瞄准轴不断变化,实现角度跟踪干扰。
2.1 速度波门拖引原理[2]
由于在脉冲多普勒雷达导引头速度跟踪环路中,速度门内强信号将压制弱信号;另外,速度跟踪环路具有跟踪频率斜升的能力,因此可以通过拖引速度波门破坏正常的速度跟踪。速度波门拖引干扰通常分为3个阶段:停拖期、拖引期和间断期。在拖引期通过改变干扰信号的多普勒频率,使干扰信号的多普勒频率与回波的多普勒频率逐渐分离。由于干扰信号大于目标回波,将使雷达导引头的速度跟踪环路跟踪在干扰的多普勒频率上,造成速度信息的错误实现干扰信号的多普勒频率与目标回波多普勒频率的分离。
2.2 速度拖引对角跟踪系统的影响
在载机与诱饵形成的双点源干扰中,对诱饵转发的回波信号频率按速度拖引信号多普勒频率进行调制。

图3 诱饵干扰信号形成电路
与普通拖曳式诱饵信号形成电路相比,在新的诱饵干扰信号形成电路中增加了频移调制电路和相位调制电路,这两个电路主要有两个作用:一是对诱饵转发的目标回波信号频率进行调制,形成速度拖引;二是对诱饵转发的目标回波信号初始相位进行调制。在频率调制和相位调制的作用下,诱饵信号与目标信号的相位差也受拖引速率调制,从而实现对角度跟踪系统的干扰。
速度拖引干扰要在间断期与目标回波信号进行竞争以捕获雷达导引头的跟踪波束,目标信号与干扰信号的合成信号进入跟踪波束,在停拖期由于干扰信号与目标回波信号具有相同的多普勒频率,在此期间干扰信号与目标回波信号不易分离,这就意味着在停拖期内目标与诱饵形成的双点源干扰信号能够对雷达导引头角跟踪系统进行欺骗。则可得到偏离距离d为:
式中φ为接收到的两个相干干扰源的干扰信号之间的相位差:

式中fds为拖引速率,可见相位差随跟踪时间的变化而变化。
下面对相位差φ进行分析。当φ服从(0,2π)均匀分布时,偏离距离d>100的概率为0.0938;由于在相位差为π时,偏移距离最大,当φ服从正态分布(π,π/6)时,偏移距离与幅度比的关系如图4所示,偏离距离d>100的概率为0.8594。
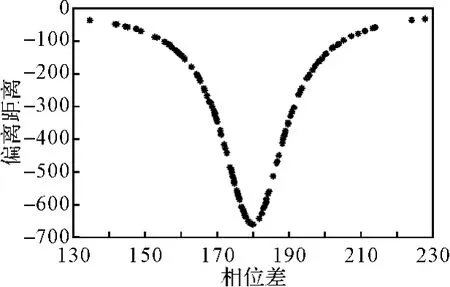
图4 φ服从正态分布偏离距离与相位差关系图
通过计算可知当φ=π/2时,相位差φ变化比较剧烈,在这里取φ的取值服从正态分布(π/2,π/12),使得干扰信号处于停拖期时就对雷达导引头形成双点源干扰,对雷达导引头角跟踪系统进行欺骗。拖引期相位差φ为:

其分布情况如图5所示;在拖引期偏离距离的变化情况如图6所示。

图5 相位差与拖引时间关系图
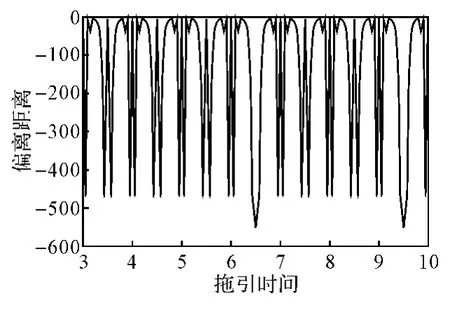
图6 偏离距离与拖引时间关系图
从图中可以看出偏离距离随拖引时间(拖引频率)的变化而变化。在拖引期,雷达导引头跟踪点的位置做周期性变化,导引头的跟踪方向每隔一个周期将会做一次剧烈变化,这种跟踪方向的剧烈摆动,将会使雷达导引头丢失跟踪点而失控,因而无法有效的测定和跟踪目标,并且雷达导引头的跟踪点始终处于偏离目标 诱饵连线中点且偏离诱饵的位置,将必然导致导弹脱靶量的增加,这就提高了目标生存的可能性。
在间断期,由于干扰信号突然消失,对于角跟踪系统而言,只有目标回波信号进入,此时天线指向角将发生较大摆动指向目标,跟踪摆动距离为:

通过计算得到干扰信号突然消失时偏离距离dd=504m,由于导引头跟踪角度的突然变化,偏离距离很大,导弹将会因为跟踪角度的突然变化而失去控制。
3 结束语
随着雷达导引头抗干扰技术的发展,探索新的干扰方式迫在眉睫,使得雷达导引头的电子对抗形势日益严峻。文中介绍了拖曳式诱饵对雷达导引头测角影响的原理以及速度拖引原理。在此基础上提出了一种新的干扰模式,即速度拖引诱饵干扰。大大提高了普通拖曳式诱饵对角度跟踪系统的干扰效果,而且能够实现对雷达导引头的速度拖引,大大提高了目标的生存概率。
[1]陶茀毓.拖曳式干扰与防空导弹的制导体制[J].地面防空武器,2003(1):29-32.
[2]林象平.雷达对抗原理[M].西安:西北电讯工程学院出版社,1985.
[3]徐松涛,杨绍全.被动单脉冲导引头对两干扰源的跟踪特性研究[J].西安电子科技大学学报(自然科学版),2001,28(5):681-684.
[4]李相平,赵腊,胡磊.相干两点源对反舰导弹导引头的干扰研究[J].制导与引信,2008,29(3):48-52.
[5]白渭雄,焦光龙,付红卫.拖曳式诱饵对抗技术研究[J].系统工程与电子技术,2009,31(3):579-582.
[6]吕彤光,姜文利,李盾,等.两点源诱偏被动雷达导引头性能分析[J].系统工程与电子技术,2002,24(4):47-50.
[7]张娟,张林让,张娇云.拖曳式诱饵对多普勒雷达导引头的干扰仿真[J].系统仿真学报,2007,19(1):114-117.
