基于自适应控制器的无人机飞行控制系统研究*
2010-12-07张京娟
王 洋,张京娟,刘 伟,王 超
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
0 引言
小型无人机与有人驾驶飞机和大型无人机相比,具有低空低速、体积小、噪音低、经济性好的特点[1]。但自身动力、成本等因素的限制,小型无人机留空时间普遍较短,巡航速度低。故研究了一种可远距滑翔、贴近探测的小型无人机,采用可折叠式结构设计,高空投放后展开机翼无动力滑翔进入目标区,在一定程度上突破了动力及飞行距离等方面的限制。
由于采用特殊的结构设计,该无人机在重量、体积及飞行速度方面受到了极大制约,故在复杂天气的大扰动环境下,姿态、位置的稳定性就成为了首要需要解决的问题,也是能否成功完成飞行任务的关键。故在传统经典PID控制算法的基础上应用了一种带死区变增益PID自适应控制方法[2],有效的抑制了大扰动条件下对其姿态、位置的影响,并在仿真及飞行实验中得到了验证,十分有效的提高了飞行的稳定性和精度。
1 系统概述
1.1 小型无人机主要参数
该小型无人机机翼展长3m,机身长2m,起飞重量G=98N,有效载荷29.4N,发动机输出功率320W,定常飞行速度20m/s。飞机的布局形式为大展弦比机翼、V形尾翼的正常式布局。大展弦比可有效地降低飞机的诱导阻力,提高全机升阻比,采用V形尾翼,将传统的平尾和垂尾合二为一,在满足全机稳定性的前提下,减小了尾翼的浸润面积,使尾翼的摩擦阻力和干扰阻力都得到显著减小[3]。
1.2 小型无人机飞行控制系统硬件组成及工作原理
该小型无人机飞行控制系统包括GPS接收机、IMU惯性测量单元(输出3个自由度角速度和加速度)、磁罗盘、气压高度计、空速计和导航/飞控计算机等(见图1)。其中,GPS接收机输出实时GPS位置、GPS速度信息,频率为1Hz;磁罗盘用于提供导航计算开始解算时的初始航向角;气压高度计输出实时气压高度信息,为导航解算输出的高度进行阻尼;空速计用于测量机头正前方向的空速;导航/飞控计算机用于对各种传感器信息进行采集和预处理,并进一步将处理过的信息传送至导航计算机进行融合、并进行适当的滤波以及导航解算得到精确的导航信息(包括位置信息、速度信息和姿态信息),将导航信息送至飞控计算机进行飞行任务的管理和飞行控制律的设计,再把控制信号输送给执行机构最终实现对小型无人机自主飞行的控制,完成预定的飞行任务。系统工作原理框图如图2所示。
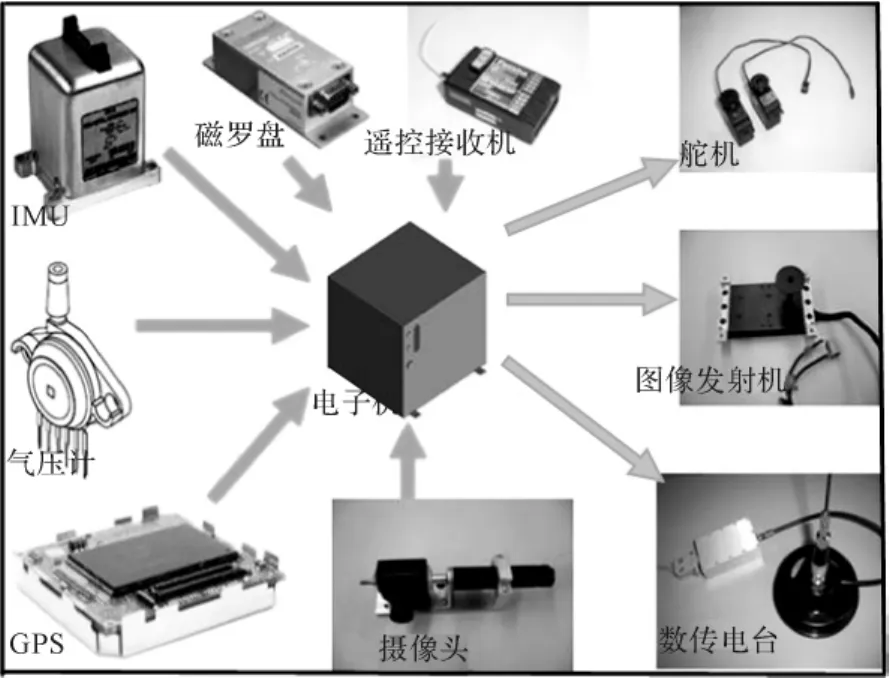
图1 系统组成示意图
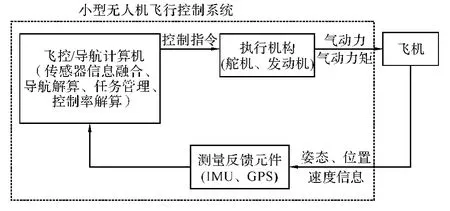
图2 飞行控制系统工作原理框图
2 小型无人机飞行控制系统设计
2.1 六自由度非线性动力学模型的建立
设计控制策略之前,首先要建立小型无人机的六自由度非线性模型。根据文献[4]所述的动力学方程组、角位置运动学方程组及线位置运动学方程组,对其位置信息、姿态信息和速度信息进行解算。该六自由度动力学模型是一组复杂的非线性方程,只能通过数值积分的方法求解。
建立动力学模型,需要对其气动力参数进行假设和估算。由于小型无人机体积和重量小,进行吹风实验难度较大。按照相关文献介绍,亚音速和低速常规布局飞机动力系数计算分为三部分,即:静导数计算、动导数计算和操纵导数计算,进行气动力导数计算的假设条件为[5]:机翼为大展弦比机翼,机身按翼身融合体拟合,飞机纵横向解耦;升力主要考虑机翼升力,不考虑马赫数影响,纵向气动力矩主要考虑机翼和尾翼贡献;飞机纵向操作面考虑升降舵引起的力和力矩的变化;推力矢量保持在飞机的纵向对称面内,假设为等功率动力装置。
2.2 自适应PID控制策略设计
自适应PID控制是在传统PID基础上,对系统的模态进行划分,对每段采用不同的控制方法。带死区变增益PID自适应控制参数运算方程为:

式中:y是控制输出量,Δe是控制偏差量,KP、KI、KD为比例系数、积分系数和微分系数。P、I、D为开关项,为0时,相应的控制项失效。

为了避免控制动作过于频繁,消除由此引起的振荡,可以人为设置一个不灵敏区B,即采用带死区的PID控制。B是一个可调参数,太小则动作过于频繁,达不到稳定控制过程的目的,过大又会产生很大的误差和滞后,故应根据实际情况来设定B值。
带死区控制是克服发动机工作时的振动而引起的抖舵现象,避免控制过于频繁而引起的振荡。变增益控制是克服在大扰动情况下造成无人机姿态、位置突变,采用分段处理能够迅速抑制大扰动的同时,又兼顾系统的控制稳定性和精度。
2.3 定高巡航迹飞行控制系统设计
定高巡航迹飞行是将预定高度、航迹点经纬度存储到控制计算机程序中或者通过地面控制站将航迹点上传,实时改变无人机的巡航路线。导航计算机根据采集的GPS、IMU和气压高度计信息进行组合导航解算,输出无人机高度、位置、姿态,并计算出高度偏差、偏离航线的侧偏距和航向偏差。通过偏差量控制计算机输出PWM产生舵偏角,形成闭环控制系统。
2.3.1 纵向控制通道设计
纵向控制通道控制俯仰角和高度保持,包含3个回路:俯仰阻尼内回路、俯仰角保持回路和高度控制回路。俯仰阻尼内回路通过IMU输出的ωy进行反馈,构成俯仰角阻尼内环,同时,根据组合导航输出的俯仰角反馈构成俯仰角控制外回路。由于小型无人机在平飞时会有一个常值迎角,故在俯仰角控制回路加入常值配平俯仰角指令,并在升降舵加入相应的配平舵面角。高度保持回路位于最外层回路,通过设定的高度值和组合导航的输出高度值形成高度偏差,从而转换成相应的俯仰角指令,该回路采用比例积分控制方式。俯仰角指令要加入指令限幅,防止出现无人机的过大机动动作。纵向通道的原理框图如图3所示。

图3 纵向通道控制原理框图
控制率为:
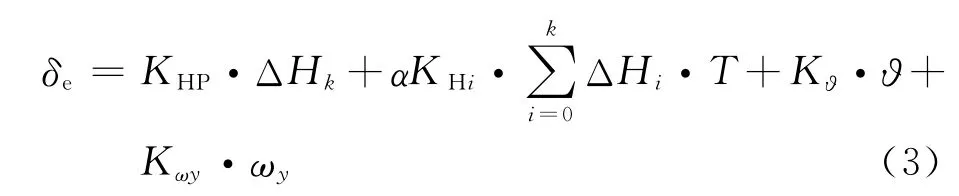
式中:δe为升降舵输出控制量,ωy为俯仰角速率;ϑ为俯仰角;ΔH=Hc-H,Hc为高度指令;T为采样周期;α为积分项的开关系数:

2.3.2 横侧向控制通道设计
横侧向控制通道主要包括横滚控制、航向保持和侧偏距修正3条回路。该小型无人机为大展翼,转弯过程采用副翼转弯方式,方向舵起辅助协调作用。横滚控制以横滚角速度、横滚角反馈构成横滚阻尼及角度控制内回路。横滚回路使横滚角发生变化从而利用升力的侧向分量进行转弯,是飞机航向变化的执行回路。外回路由航向控制和侧偏距控制回路组成,偏离航线的侧偏距和目标航向角(见图4)均由导航计算得出,经相应控制环节后叠加给出无人机的航向指令,控制无人机回到设定航线。控制中航向角指令和横滚角指令应加限幅。横侧向控制原理图如图5所示。
如图4所示,Pi-1为前一航迹点,Pi为下一航迹点,Pm为无人机当前位置,ρ为目标航迹角,δic为航线航迹角。

横侧向通道的控制率[6-7]设计如下:
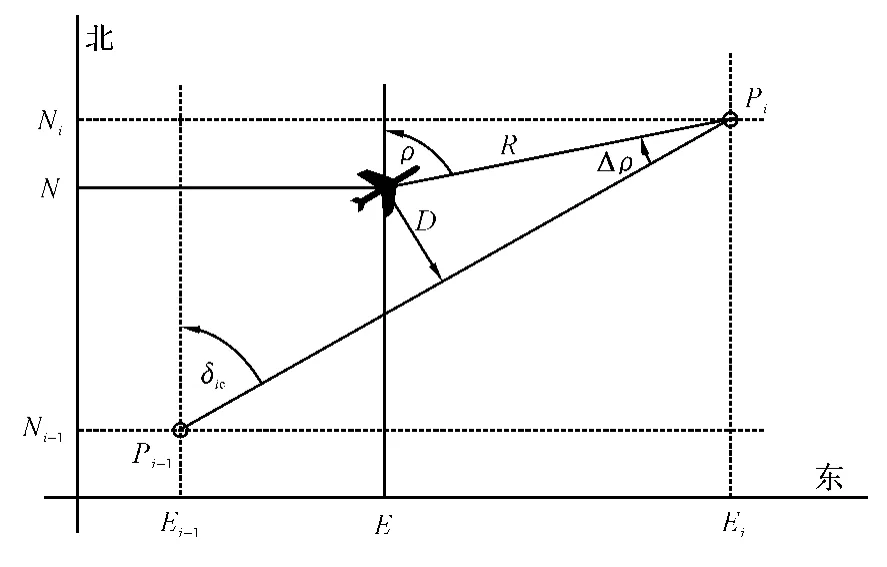
图4 侧偏距及航线航迹角示意图
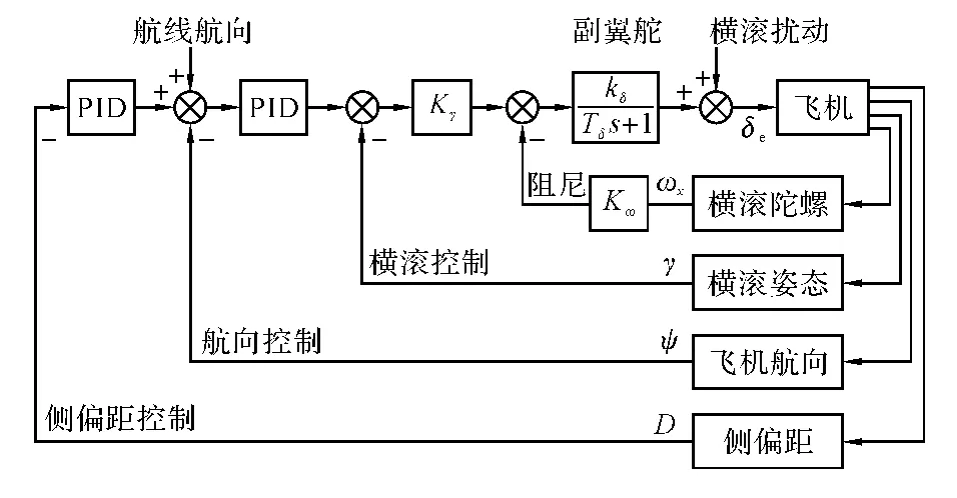
图5 横侧向通道控制原理框图
当侧偏距D>50m时:

当侧偏距D≤50m时:

式中:δa、δr分别为副翼、方向舵输出控制量;ωx、ωz分别为横滚角速度、航向角速度;Δψ=ψc-ψ,ψc为期望的飞行航向,也就是上述的目标航迹角ρ;γ为横滚角;β为积分项的开关系数;KD1、KD2分别为分段处理时的侧偏距比例系数。
通过上述的公式可知,采用了带死区变增益PID控制方式,当侧偏距小于一定范围时,应对比例系数大小进行调整,防止飞行过程中在航线附近发生振荡,当侧偏距大于一定范围时,由侧偏距和目标航迹角转化的航向指令应限制在±90°,防止出现过大超调,尽量满足压线飞行。同时,当待飞距离R<50m时,目标航迹点切换到下一航迹点。
油门通道控制如下:

式中:δp为油门输出控制量,Δv=vc-v,vc为期望的空速值。
2.3.3 舵偏角控制量转换关系
该小型无人机采用了V形尾翼布局,通过左、右V尾的独立控制可以实现常规布局中的方向舵和升降舵的效果。假设左、右V尾舵偏角为δVl、δVr,对应常规布局飞机的升降舵和方向舵偏角为:

反之,可以根据升降舵和方向舵的舵偏角推算出左、右V尾的舵偏角控制量。
3 飞行仿真验证及飞行实验
3.1 飞行仿真验证
根据六自由度非线性模型和控制律算法,对定高巡航迹点飞行进行了仿真验证。仿真中模拟加入了各种传感器噪声,IMU输出的角速率噪声模型为一阶马尔科夫过程,根据IMU的指标,设定相关时间为5s,均方差为30°/h。组合导航的姿态角误差模型为均方差1°/h的白噪声序列,位置误差为均方差10m的白噪声序列。仿真时应考虑大扰动的情况,对于亚音速飞机,10m/s的环境风速对飞机的影响很小,但对于巡航速度20m/s的小型无人机,5m/s的风速已经是一个很大的干扰,故在仿真中加入了5m/s的侧向突风。
设定飞行高度为200m,初始位置为原点(0,0),设定航路为四航点,分别为(300,500)、(300,1500)、(1300,1500)、(1300,500),空速保持在20m/s。
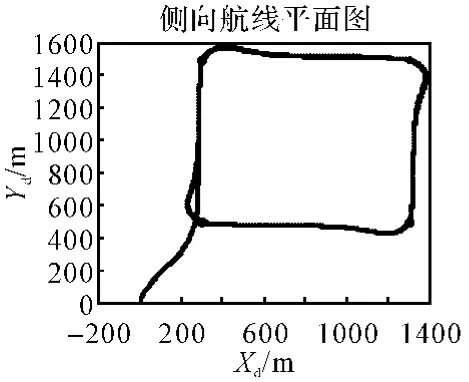
图6 平面位置轨迹图
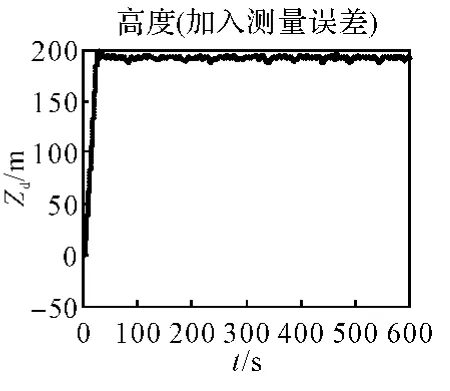
图7 高度轨迹图
图6~图7可知,飞行轨迹较好的满足压航线飞行的要求,在航迹点切换过程中,过渡平稳,并且在加入了5m/s突风的情况下,位置保持良好,能够迅速修正由于大扰动引起的偏差。高度基本保持在200m,由于加入了噪声,高度误差在10m以内,满足飞行要求。
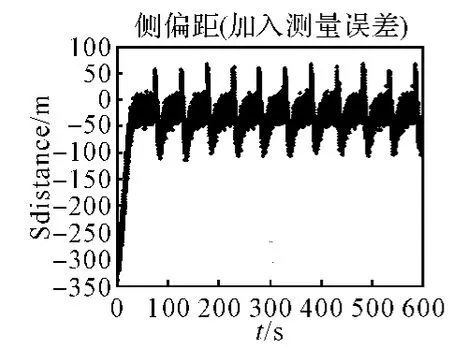
图8 侧偏距输出图
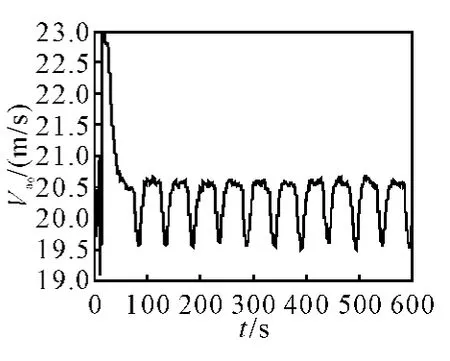
图9 空速保持图
图8的侧偏距输出表明,侧偏距大部分时间能够保持在50m的范围内,即使侧偏距出现稍大偏差,也能够通过变增益控制迅速对其进行修正,达到了很好的效果。空速通道由于采用了PI控制,空速保持在20m/s,保证了爬坡过程中的推力要求。
3.2 飞行实验结果
通过对系统的仿真验证及地面的反复调试,完成了小型无人机的外场实验。实验过程主要分两步进行:1)首先接通控制系统的纵向通道,对俯仰角和高度回路控制进行验证和调试,调整控制参数;2)接通横侧向通道,对侧偏距修正和航向角控制进行验证和调试,调制控制参数,以达到相对最佳的控制效果。
四航迹点间隔400m,飞机速度为30m/s,最大横滚角限定为±30°。航迹点的切换选择过线切换方式,沿飞行方向在距目标航迹点100m处设定一条垂直于航线的切换线,飞过该垂线目标航迹点会切换为下一个预定航迹点。实验当天通过手持风速计测量有约7m/s北风,故对航线切换距离门限适当放宽。
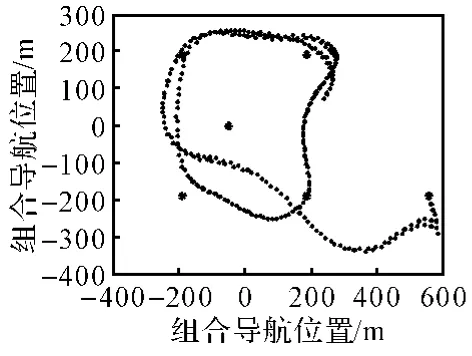
图10 试飞平面位置轨迹图

图11 试飞高度轨迹图
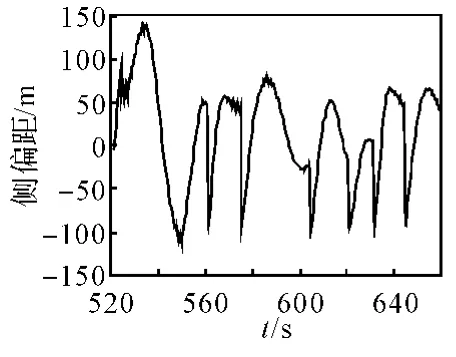
图12 试飞侧偏距输出图

图13 试飞空速保持图
通过试飞的实验数据可知,在7m/s的常值风情况下,飞行控制系统较好的完成了巡航迹飞行的任务。高度保持在200m,误差在10m以内,与仿真结果一致。同时,考察压航线指标的侧偏距数据,大部分时间在50m以内,由于侧风等大扰动,可能会出现瞬时偏差较大,但能够迅速的进行修正。空速保持得也较好,保证了飞行的安全可靠性。
4 结论
文中研究的小型无人机体积小质量轻,低空低速时易受风的扰动影响而使姿态和航向发生变化,所以实现大扰动条件下的高精度飞行,是文中研究的重点。?对于那些对象特性或扰动特性变化范围很大,同时又要求经常保持高性能指标的一类系统,采取自适应控制是合适的。故在常规的反馈控制系统基础上,应用了一种带死区变增益PID自适应控制策略。通过仿真验证及飞行实验结果表明,此控制方法非常切合该小型无人机的自身性能和飞行任务需求,在系统的稳定性和精度要求方面达到了良好的效果。
[1]李志宇,徐烨烽,杨国梁.跟踪地面目标小型无人机飞行控制仿真研究[J].科学技术与工程,2008,8(5):1374-1378
[2]陶冶,房建成,盛蔚.一种微小型无人机带死区变增益PID自适应控制器的设计与实现[J].自动化学报,2008,34(6):716-721
[3]马东立,马铁林,刘薇薇.某无人机气动估算与风洞试验[J].北京航空航天大学学报,2006,32(12):1399-1417
[4]张明廉.飞行控制系统[M].北京:航空工业出版社,1994:41-44
[5]金岳,王维军,方振平.小型无人机纵向动态特性试验验证[J].飞行力学,2006,24(4):9-13.
[6]陈欣,杨一栋,张民.一种无人机姿态智能PID控制研究[J].南京航空航天大学学报,2003,35(6):611-615.
[7]Oblmeyer E J,Pepitone T R.Guidance,navigation and control without gyros:agun-launched munitions concept[C]//Proceedings of AIAA Guidance,Navigation,and Control Conference and Exhibit.Monterey,California,USA:AIAA,2002:1-14.
