一种混响背景下的水中目标探测方法*
2010-12-07王海燕张颖峰
吴 玮,王海燕,程 刚,周 倩,张颖峰
(西北工业大学,西安 710072)
0 引言
对于水下弹箭的探测制导,由于海洋工作环境非常复杂,混响作为主动工作方式下特有的背景干扰,一直是水声信号处理的难题,它大大限制了水下近程目标探测系统的作用距离和参数估计性能。因此,如何利用背景干扰的特点,寻找简单有效的目标探测方法一直以来都是研究的热点[1-2]。目前,国内外研究多关注于混响的抑制方法,如特征滤波、白化滤波、奇异值分解等[3],这些算法大多运算复杂或对先验信息要求苛刻,实时处理性不高,难以很好地应用于工程实践。
对于这一问题,文中针对小型近程目标探测系统要求结构简单、实时性好、易于工程实现的特点,结合回波识别与方位估计技术,设计了一种混响背景下水中目标探测制导方法。此方法可使水中目标探测装置准确的探测到目标并估计出目标方位信息,在探测制导过程中,由得到的目标方位信息调整航行姿态,从而更精确有效的打击水中目标。
1 水中目标探测系统分析
1.1 系统原理概述
水中目标探测系统在没有发射探测信号前首先采集海洋背景作为其检测门限,系统的接收装置经接收换能器接收到干扰和目标回波信号,并进行滤波和A/D采样将其转换为数字信号。因发射后立即接收将会受到很强的干扰影响,所以系统延迟一定时间再进行回波信号的接收。对于接收到的回波信号,根据其信混比采用恒虚警浮动门限法进行判决。当判决有回波信号时,选择适当的方法进行参数估计。其原理框图如图1所示。

图1 水中目标探测系统原理框图
1.2 系统背景干扰分析及参数估算
水中目标干扰背景主要包括海洋噪声、混响色噪声以及探测装置的本机噪声等。由于文中所研究的目标探测系统采用主动探测方法。主动探测的背景干扰包括了海洋噪声和混响色噪声。一般来讲,这两种干扰总是同时存在。所以,在系统设计时首先要分析干扰背景并进行参数估算,这样才能更有效的利用先验信息进行探测。下面结合具体的探测系统进行系统参数估算,并给出回声级、混响掩蔽级和噪声掩蔽级变化曲线。
由主动声纳方程可知,信号回声级为:

体积混响等效平面波混响级为:

海底混响等效平面波混响级为:

式中:SL为辐射声源级;TS为目标强度,TL为传播损失;c为声速,τ为脉冲宽度,ψ为等效合成束宽,Sv为体积散射强度,Sb为体积散射强度,r为传播距离。
图2为深海平均自然噪声谱可知在不同海况下的噪声谱级。
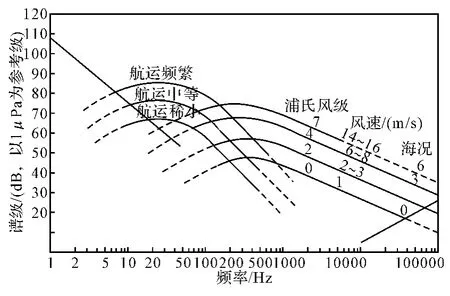
图2 深海平均自然噪声谱
若系统辐射声源级SL=185dB,当6级海况时NL=55dB。目标反射强度TS=15dB,体积散射强度Sv=-85dB,海底散射强度Sb=-23dB,体积混响等效合成束宽ψ=7.51rad,海底混响等效合成束宽φ=1.93rad,脉冲宽度τ=10ms,由上述相关参数可计算出回声级、混响级、噪声级与传播距离的关系如图3所示。
从图3可以看出,对于近程主动声纳探测制导系统,主要背景干扰为与发射信号同频同带的强混响色噪声。
1.3 混响背景模型的建立
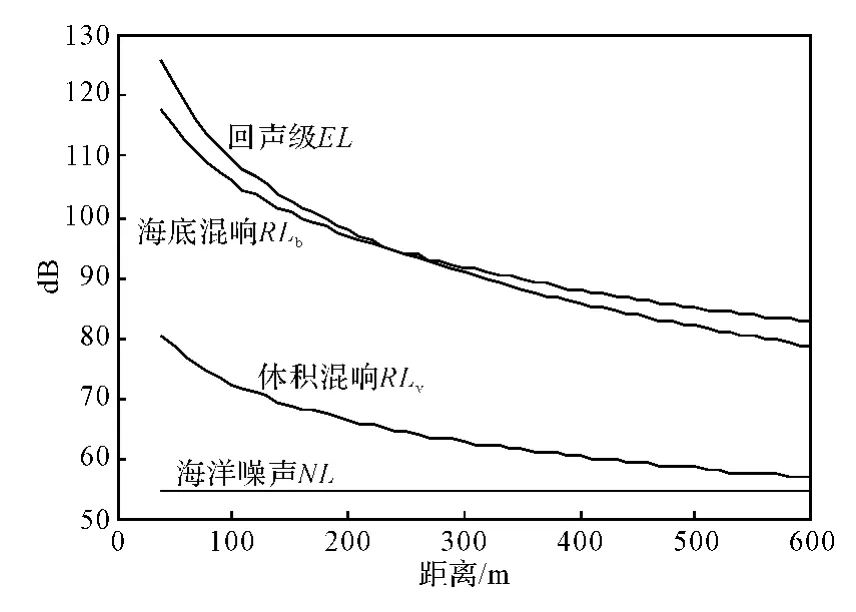
图3 回声级、混响级及噪声级与距离的关系
为了准确检测信号,首先要对混响背景进行建模。混响是存在于海洋中大量不均匀性物质对声波散射所形成的,作为大量这种散射波叠加总和的混响是一个非平稳随机过程。
在文献[1]关于混响成因的讨论中已经指出,混响的瞬时值服从高斯分布、包络服从瑞利分布。由此,可以用高斯白噪声通过窄带滤波器再乘以相应的混响包络曲线产生窄带噪声来建立混响模型[4]。
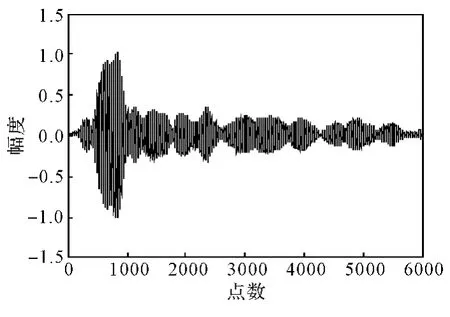
图4 混响仿真信号
图4所示为仿真的混响信号。由图4可看出混响会随时间衰减,所以在文中研究的小型探测制导系统中,由于受到硬件条件以及实时处理的限制,采用延迟一定时间再进行回波信号接收这种简单的抗混响方法,可对混响进行初步抑制,且易于硬件实现。
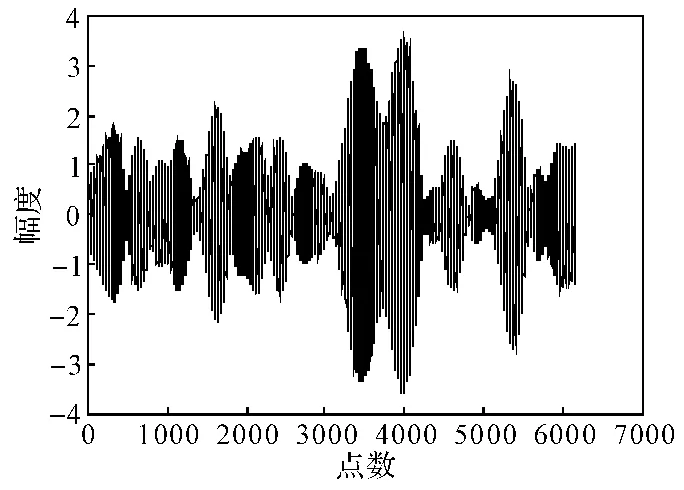
图5 混响背景下目标回波仿真信号
图5所示为当发射信号频率为10kHz、脉宽为10ms的CW脉冲时,背景干扰利用前述方法所建立的混响背景模型,经仿真得到的混响背景下的目标回波信号。
2 目标探测与回波识别
由于复杂的混响抑制方法不能很好地应用于结构简单且实时性处理要求高的探测制导系统,所以在对混响初步抑制的基础上,主要利用回波识别和方位估计相结合的目标探测方法来排除这些干扰对目标探测性能的影响,准确探测并打击目标。
由前述分析可知,海洋混响是瞬时值服从高斯分布,包络服从瑞利分布的非平稳随机过程。振幅分布的概率密度函数为:


式中,VT为检测门限。可见,虚警概率将随背景干扰的功率而变化。如果保持一定的虚警概率PF,检测门限VT可表示为[4]:

由于检测门限VT随背景干扰功率σ2E而变化,所以可以根据背景干扰电平的变化自动调整检测门限VT,使其始终保持在最佳检测门限电平上,从而实现恒虚警检测。
在文中所设计的探测方法中,采用了一种浮动门限自适应修正方法。当开始对信号进行检测时,取一段加了噪声干扰的信号并计算其均值,将其与浮动门限进行比较,根据浮动门限电平进行判决检测。如果没有超过门限,则认为信号不存在,并继续对浮动门限进行修正,使其保持为恒虚警检测的最佳门限。其流程如图6所示。
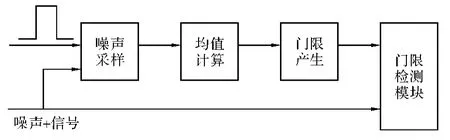
图6 单门限恒虚警检测仿真流程图
理论推导的浮动门限自适应修正方法为:

式中:P为调整门限浮动大小的参数,¯C是每次所截取数据的均值。浮动门限变化如图7所示。由图7可见,所研究的浮动门限自适应修正方法能使检测门限很好的跟随目标回波信号的变化趋势。
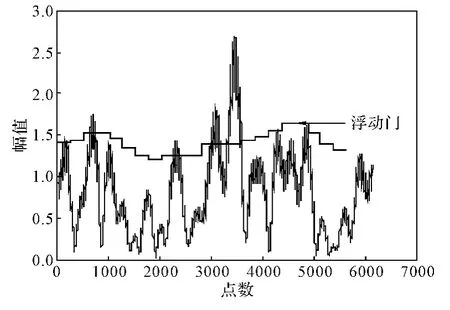
图7 浮动门限示意图
3 制导方位估计
在确认检测到回波信号后,可根据得到的信息进一步进行方位估计,确定水下目标的具体方位角、俯仰角,然后对系统进行制导。方位估计方法很多,主要有4种估计方法:互谱估计法、基于自适应的时延估计法、基于最大似然的时延估计法、基于相关分析的时延估计法等[5]。文中结合所研究的探测系统,对工程易于实现且常用的自适应时延估计法作以分析和研究。
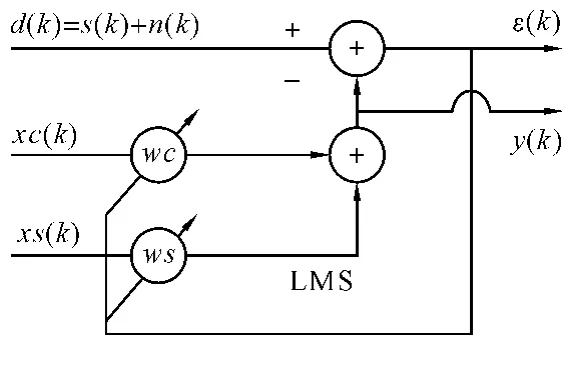
图8 自适应Notch滤波器
图8为自适应Notch滤波器原理图。滤波器输入为时间序列d(k)=s(k)+n(k),k= 0,1,2,…,L-1为时间序号。其中s(k)=Acos(w0k+φ)为单频信号,A为信号幅度;φ为初相位,两者均为常量。n(k)为宽带噪声,xc(k)和xs(k)为两路正交参考输入,wc(k)和ws(k)为权值输出,ε(k)为残差输出,y(k)为信号输出。
自适应采用LMS算法,由文献[4]可知,当自适应过程收敛时:

得到相位值:

因为从输入到权值输出对应的系统是非线性的,并且目标的定向需要的是相位差信息,所以构造了滤波器的另一路输出信号,即由两个自适应Notch滤波器联合估计,构成自适应Notch滤波器相位差时延估计器,当其达到稳态时:
4 仿真分析及试验结果
4.1 目标探测方法运算量分析
由式(6)、式(7)可知,在回波识别时,对实时采集到的一段长度为N的数据需做N+2次加减、4次乘除。由式(8)~式(10)可知,在方位估计时,自适应法一次迭代所需的运算量为10次加减、17次乘除。而经典的互谱法则需做两次FFT,对于N点的FFT共需做4Nlog2N+3次乘法,6Nlog2N次加法。用文中所述方法处理一段长度为N的数据,最少仅需21次乘除,N+12次加减。图9、图10比较了文中所提检测方法与经典互谱法所需的运算量。从图可见,随着N的增大,文中所述方法运算量明显小于经典互谱法。由此可见,对于小型探测系统来说,相比于涉及到复杂计算的系统,文中设计的方法运算量很小,对实时采集的数据,在短时间内即能完成目标回波检测与方位估计运算,达到实时处理的目的。
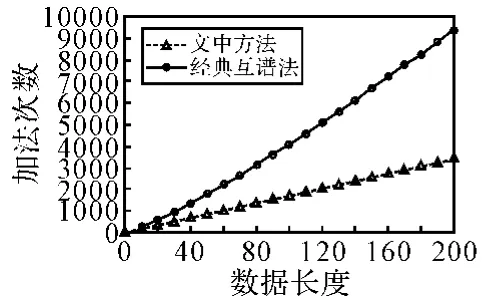
图9 两种方法加法次数的比较
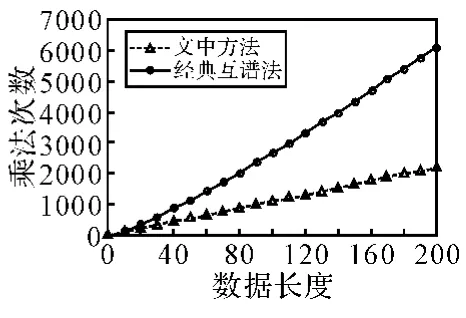
图10 两种方法乘法次数的比较
4.2 回波探测识别仿真检测结果
利用已建立混响模型,在不同信混比下经大量仿真,检测结果如表1所示。

表1 不同信混比下的检测概率和虚警概率
4.3 制导方位估计仿真结果
不同信混比下,制导方位估计的正确检测百分比结果如表2所示。
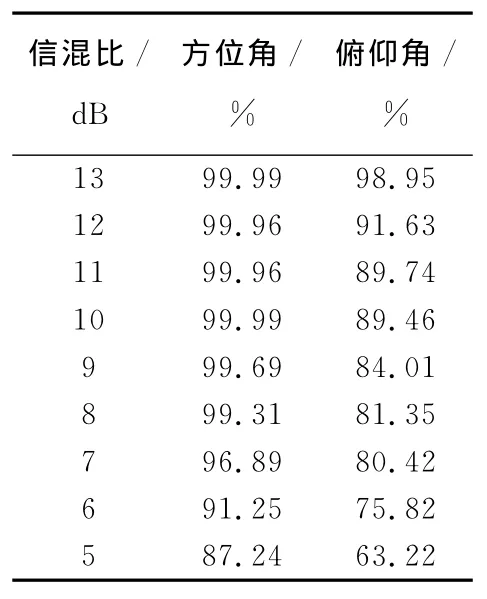
表2 不同信混比下估计误差小于6°的正确检测百分比结果
4.4 湖试试验结果
近期已对所研究的水中目标探测系统进行了湖试,结果表明系统达到了设计要求,对水下目标检测概率达96.83%,方位估计误差小于6°时正确检测百分比大于95%,能很好的检测到水下目标。
5 结论
文中对水中目标探测方法进行了详细的技术分析,针对探测系统背景干扰为强混响的特点,设计了有效的目标回波识别及制导方位估计方法。仿真分析和试验结果表明,文中所研究的方法切实可行,运算量小易于硬件实时处理与实现。且能简单有效的探测到水中目标并准确的估计其方位。可为探测制导装置提供准确目标信息打击目标。
[1]Robert J Urick.Principles of underwater sound[M].MC.Craw-Hill.Inc,1983.
[2]G Ginolhac,G Jourdain.Detection in presence of reverberation[C]//Oceans’00,Providence,RI,2000.
[3]许江湖,张明敏.主动声纳的混响抑制方法[C]//中国造船工程学会电子技术学术年会文集,2006:476-478.
[4]王新晓,张群飞,黄建国.海洋混响仿真技术[J].声学与电子工程,2002(3):27-30.
[4]郭爱芳,侯民胜,郭廷铠.噪声恒虚警处理电路的计算机仿真[J].电子工程师,2007,33(7):4-6.
[5]邱天爽,魏东兴,唐洪,等.通信中的自适应信号处理[M].北京:电子工业出版社,2005.
[6]刘朝晖,付战平,王明洲.基于方位走向法和互谱法的水中目标识别[J].兵工学报,2006,27(5):932-935.