二自由度混合磁轴承设计与有限元分析
2010-11-20邬清海莫丽红贾红云
张 涛,邬清海,倪 伟,莫丽红,贾红云
(1.淮阴工学院,江苏淮安223000;2.东南大学,江苏南京210000)
0 引 言
磁轴承具有无磨损、无需润滑和密封、高速度、高精度、寿命长等优良品质,从根本上革新了传统的支承方式。针对主动磁轴承体积大、直流功放功率损耗高、气隙偏小及成本高等缺点,本文设计了结构新颖、紧凑,易于采用高性能数字信号处理器DSP控制的三相逆变器来驱动的新型交流二自由度永磁偏置混合磁轴承[1-3]。
本文在分析其工作原理的基础上,基于磁路分析法推导出该磁轴承的数学模型;并设计了实验样机,运用Maxwell 3D有限元分析软件对交流二自由度混合磁轴承的磁路、转子受力特性进行仿真计算,验证了二自由度混合磁轴承悬浮原理,计算了径向力与位移以及径向力与控制绕组电流之间关系,得出磁轴承的最佳工作范围。并对控制系统进行仿真实验研究。研究结果证明了实验样机设计数据准确,能够实现转子稳定悬浮。
1 交流二自由度混合磁轴承工作机理
交流磁轴承工作原理如图1所示,基于无轴承电机原理,使电机转矩绕组极对数pM=0,径向力绕组极对数pB=1,两者之间满足径向力产生条件pM=pB±1,这种结构的无轴承电机实际就变成了只产生径向力的磁轴承。根据电机理论,三相对称绕组通过三相交流电流后,可产生一个合成旋转磁动势。当转子在平衡位置受到径向扰动力,即转子偏离几何中心位置时,传感器检测出转子的偏移量x与y,经过A/D转换后,将采样信号传送给处理器,通过处理器实现数字PID和2/3坐标变换,经过算法处理后由三相逆变电路驱动磁轴承的控制电流,气隙磁场是由径向力绕组电流产生的磁场和永磁体磁场相互叠加而形成合成磁场,这个磁场对转子的磁吸力与位置偏移的方向相反,使转子回到径向平衡位置,从而实现转子悬浮。

图1 交流二自由度混合磁轴承工作原理
2 交流二自由度混合磁轴承数学模型
图2是二自由度混合磁轴承三维结构图,图3是交流二自由度磁轴承磁路示意图。图中带箭头的实线表示永磁体产生的静态偏置磁通,从永磁体的N极出发经过定子凸极、工作气隙、转子、工作气隙、另一侧的定子凸极,最后回到永磁体的S极;带箭头(控制磁通箭头方向由控制电流方向按右手定则确定)的虚线表示控制磁通,由于永磁体的相对磁导率较小,控制磁通只在两侧定子的内部以及转子和气隙中形成回路,与偏磁磁通互不干扰,不存在磁路耦合。各气隙磁通由各处永磁体产生的静态偏磁磁通和控制磁通两部分叠加合成。
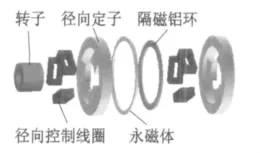
图2 二自由度混合磁轴承三维结构展开图

图3 磁路示意图
为了简化计算,对二自由度混合磁轴承磁路作如下假设[4-6]:考虑工作气隙的磁阻,忽略漏磁、铁心磁阻、转子磁阻及涡流损耗等,得到如图4所示的永磁偏磁磁路等效图。图中,Fm为永磁体对外提供的磁动势,Фm为永磁体工作磁通,μ0为真空磁导率,SA为磁极面积,GU1、GV1、GW1、GU2、GV2、GW2分别为各气隙磁导,Ni为线圈的安匝数,δ为转子在平衡位置时径向气隙长度。假设转子沿x轴和y轴正方向偏移量为x、y,则各气隙处磁导为[7-10]:

图4 永磁偏磁等效磁路

为了使转子回到平衡位置,控制电流在电磁铁中产生的合成磁通对转子的磁场吸力方向与转子的偏移方向相反。由于控制磁通不经过永磁体,与静态偏磁磁通互不影响,根据磁路基尔霍夫定律:∑F=0和∑Φ=0,求解出各气隙的合成磁通和磁感应强度为:
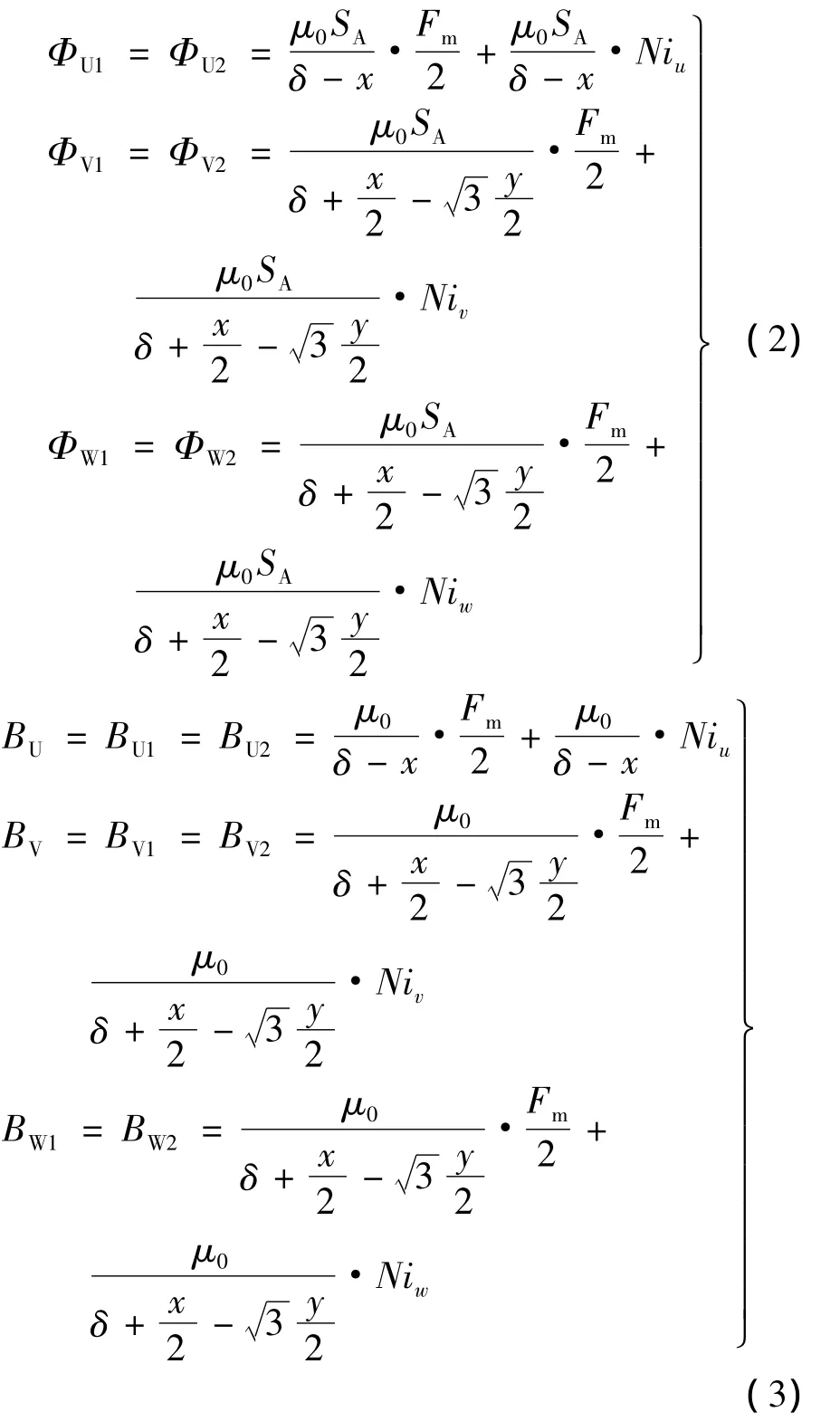
根据磁场吸力与磁通关系得到:

式中:i=u,v,w。在平衡位置附近处,由于转子偏移量远小于气隙长度,进行Taylor展开并略去二阶以上无穷小量,得:

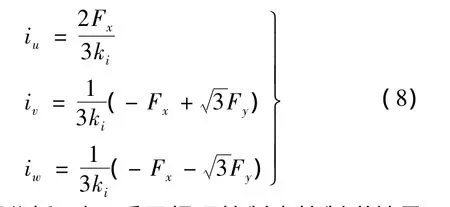
磁轴承结构和工作点确定后,Fpm和Ki均为常数;将所有的径向力Fi分解到x轴、y轴,得到径向力的数学模型:

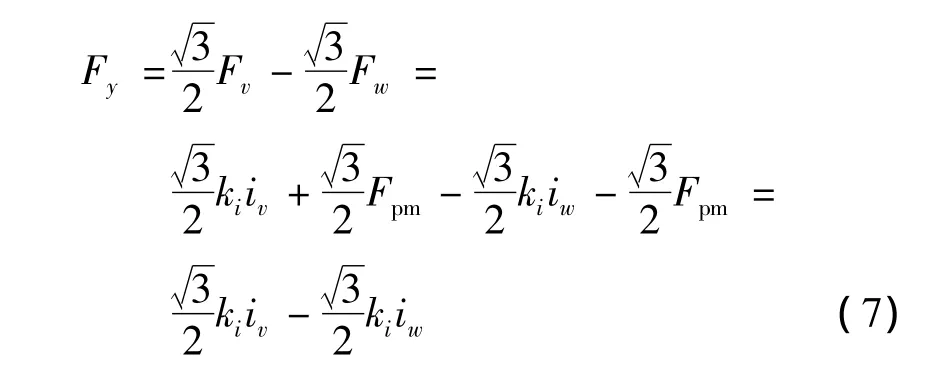
再根据交流电理论iu+iv+iw=0,得到力/电流变换公式如下:
由上面分析可知,采用闭环控制来控制磁轴承控制绕组中的电流,就能够控制径向悬浮力Fx、Fy,从而能够实现转子稳定悬浮。
3 有限元分析
3.1 几何模型的建立
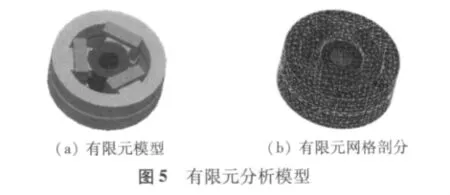
定子参数:定子轭外径88 mm,定子轭内径64 mm,定子磁极轴向长度9 mm,定子磁极宽度20 mm,定子磁极端面直径33 mm,磁极面积196 mm2,线圈匝数212匝;转子参数:转子外径32 mm,转子内径16 mm;永磁体参数:选用稀土钕铁硼作为永磁体,永磁体矫顽力900 kA/m,剩余磁感应强度为1.13 T,永磁体外径88 mm,永磁体内径78 mm,永磁体充磁方向长度3 mm,永磁体磁极截面积800 mm2;隔磁材料参数:隔磁铝环外径78 mm,隔磁铝环内径64 mm。采用有限元分析软件Maxwell,根据样机尺寸绘制几何模型,并对几何模型定义材料属性、边界条件和激励源,最后通过软件自动剖分功能建立有限元模型如图5a所示,图5b是有限元网格剖分图,然后求解。
3.2 后处理与结果分析
图6a是永磁体产生的永磁磁通在磁轴承中的分布,可看出永磁体产生的磁场在磁轴承中是对称分布的,径向各气隙处磁感应强度均相等。图6b是永磁体所产生的磁通在上侧定子中的向量分布,磁通方向是由外向内,可以判断出环形永磁体上表面是N极,下表面是S极,此时转子受到的径向合力为零。图6c是三维模型在施加控制电流条件下的静态磁感应强度分布图,转子在电磁铁线圈产生控制磁通的作用下,其中一个磁极的气隙磁感应强度是由偏磁磁通和控制磁通叠加而成。另外两个电磁铁的气隙磁感应强度是由偏磁磁通和控制磁通相抵消而成。根据图6d可以看出,其中一个磁极的磁密明显增加,同时另外两个磁极的磁密大大减弱,根据麦克斯维力产生原理可知,此时产生的径向合力指向磁通密度增加的方向。

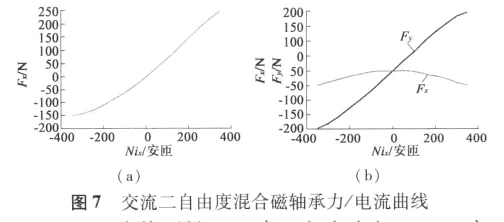
当线圈中的电流均为零,转子位移从-0.25 mm变化到0.25 mm时的转子受力情况如图7所示。图7a是转子在x轴方向的位移从-0.25 mm变化0.25 mm时,位移与转子受力的关系曲线,可以看出转子受到沿y轴方向的力Fy基本为零,转子沿x轴偏移的范围在-0.15~0.15 mm时,转子受到沿x轴方向的力Fx与位移有良好的线性关系。图7b是转子在y轴方向的位移从-0.25 mm变化0.25 mm时,位移与转子受力的关系曲线,从图上可以看出y轴方向的力Fy关于位移y有良好的对称性,但是存在沿x轴方向的力Fx,说明力与位移之间存在着一定的耦合,当位移y越大时,转子受到沿x轴方向的力Fx也随之变大,且该曲线在x轴的下方。
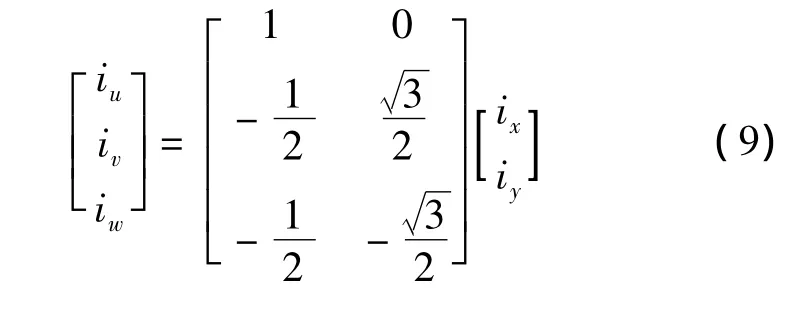
由3/2变换可得,ix、iy与三相交流电iu、iv、iw之间的关系如下:
将转子定义在平衡位置,iy为零,Nix从-350安匝变化到350安匝,其中N为实际线圈匝数。得到如图8a所示的安匝数与转子受力的关系曲线,即力/电流曲线,安匝数从-100安匝变化到100安匝时,曲线有很好的线性,在这样的范围内控制效果较好。同样,将ix定为零,Nix从-350安匝变化到350安匝,得到如图8b所示的力/电流曲线。存在力Fx,均在x轴负方向,两条曲线有良好的对称性,在-100~100安匝范围内Fx很小,随着安匝数逐渐增大,Fx增大的幅度越大。

4 控制系统仿真
根据式(7)构建出如图9所示的交流二自由度混合磁轴承控制系统框图,径向位移传感器检测出转子径向偏移位置后,将位移信号与给定参考值进行比较,其误差经PID调节后得到径向力给定信号,通过力/电流转换转换成三相控制电流给定信号,再经过三相逆变电路产生三相实际控制电流i*u,i*v和i*w,通过控制三相控制电流来改变控制磁通,调整三个互差120°电磁铁的悬浮力大小,将得到的悬浮力分解到x轴、y轴后,分别跟踪给定的位移信号,使转子回到平衡位置。由于在设计磁轴承系统的结构时,尽量考虑避免系统二自由度之间的机械、磁路及传感器之间的耦合,采用传感器差动检测转子的位置,因此不进行解耦,基本满足磁轴承控制要求。

图9 交流二自由度混合磁轴承控制框图
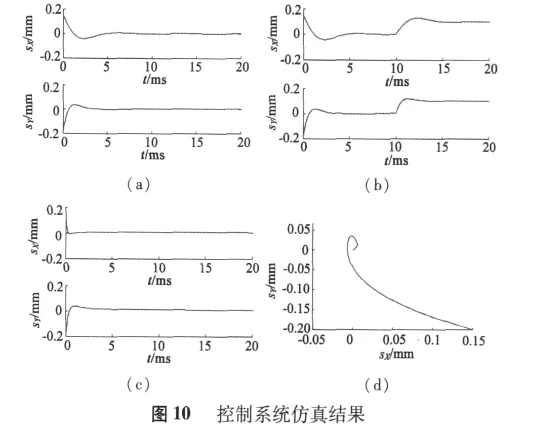
根据图9采用Matlab/Simulink构建出仿真系统。对磁轴承的起浮特性、抗干扰特性等进行仿真研究。辅助轴承径向气隙0.25 mm,假设转子起浮时在x轴方向位移初始值为0.15 mm,y轴方向为-0.20 mm,图10a是磁轴承空载起浮曲线,起动0.003 5 s后转子回到平衡位置,在0.005 s时刻加入阶跃信号,响应曲线如图10b所示,转子迅速跟踪输入信号,0.008 s左右趋于稳定。图10c是系统在负载Fx=Fy=70 N条件下起浮曲线,当转子回到平衡位置附近后,转子在施加力的相反方向有一个微小的位移偏移,存在微小的静差。图10d是转子起浮轨迹图,Fx=Fy=70 N条件下起浮,起始点在x轴和y轴方向的偏移量分别为0.15 mm和-0.20 mm,运动轨迹是以内螺旋形逼近平衡位置的曲线。
5 结 语
本文在介绍磁轴承悬浮机理的基础上,采用有限元分析软件对设计的实验样机进行三维建模与仿真,验证了磁轴承的悬浮机理,计算了径向力与位移以及径向力与绕组安匝数之间的关系,并采用Matlab/Simulink进行了控制系统仿真研究,研究结果表明:设计的实验样机能够实现悬浮,同时当转子偏移范围在-0.15 mm~0.15 mm,控制线圈的安匝数Nix、Niy范围在-100安匝~100安匝时,磁轴承的耦合相对比较小,易于控制。
[1] 刘淑琴,江大川.电磁径向轴承结构参数设计研究[J].机械设计与研究,1998,33(1):41-43.
[2] 龙志强,王水泉.径向磁轴承电磁参数的计算[J].磁性材料及器件,2000,31(5):15-17.
[3] Kenneth A,Gary L.Novel integrated radial and axial magnetic bearing[C]//In:Proc.7th Int.Symp.Magnetic bearings.Zurich,Switzerland,2000:467-472.
[4] Holger S,Frank W,Torsten R,et al.Integrated radial and axial low cost compact A.M.B[C]//Proc.7th Int.Symp.Magnetic bearings.Zurich,Switzerland,2000:449-454.
[5] Chang H,Chung S C.Integrated design of radial active magnetic bearing systems using genetic algorithms[J].Mechatronics,South Korea,2002,12:19~36
[6] Betschon F.Design principles of integrate magnetic bearings[D].Switzerland:ETH Zurich,2000.
[7] 朱熀秋,袁寿其,李彬,等.永磁偏置径向-轴向磁悬浮轴承工作原理和参数设计[J].中国电机工程学报,2002,22(9):54-58.
[8] 曾励.永磁电磁轴承的研究[R].南京:南京航空航天大学,1999.
[9] 朱熀秋.数控磁轴承的研究与实现[D].南京:南京航空航天大学,2000.
[10]R.Schöb.Beiträge zur lagerlosen Asynchronmachine[D].ETH Zürich,Switzerland,1993.
[11]Schweitzer G,Traxler A,Bleuder H.Active magnetic bearings--basis,properties,and applications of active magnetic bearing[M].Zurich:vdf Hochschulverlag AG an der ETH Zurich,1994.
