一类高性能集中绕组永磁同步电动机的径向不平衡力
2010-11-20徐飞鹏李铁才刘亚静
徐飞鹏,李铁才,刘亚静
(哈尔滨工业大学,黑龙江哈尔滨150001)
0 引 言
永磁同步电动机因其具有功率密度大、效率高、动态性能好的特点,在伺服电机领域得到广泛应用。这些电动机为获得高质量的正弦波反电动势和较高的绕组系数,大多数情况下都是采用分布绕组,集中绕组则比较少见。目前,集中绕组多见于小功率且对性能要求不高的场合,绕组节距通常限于120°电角度,相数也常常是采用单相或两相[1]。这样就使集中绕组电机的性能低于传统的分布绕组电机,也容易造成集中绕组电机就是性能低下的误解。
集中绕组电机由于每极每相槽数少,绕组直接缠绕在齿上,无效的端部长度可以减小到最小,有效降低了绕组用铜量,铜损也相对减少,尤其在电机长度较短的时候效果更加明显[1-3]。同时,由于定子槽数较少,定子可以采用加工好的齿拼接而成,无须整片冲压,又能大大降低铁心用量。另外,绕组线圈可以加工成形后再套在齿上,简化了生产制造过程。
过去认为集中绕组的缺点主要是绕组因数小[1],反电动势谐波分量大。但是只要经过良好设计,某些集中绕组永磁同步电动机可以将这些不利因素减轻甚至消除。
本文首先介绍了集中绕组的绕组划分方法,提出了一类特殊极槽数配合的电机,然后对这类电机的绕组系数和定位力矩进行了分析。最后用有限元方法[4-6]计算了其中两种结构的电机转子所受的径向不平衡力的大小及方向,并分析了其对电机正常运行造成的影响。
1 不对称结构集中绕组电机的特点
实现对称的三相绕组可以有不同极槽数的组合,这些组合需要满足以下条件:

式中:Q为电机的定子槽数;p为电机的极数;m为自然数。
关于集中绕组和分布绕组的定义,在《电机学》中并没有明确指出。文献[1]中说,具有集中绕组的电机每极每相槽数q≤1/2。如按照这个说法定义集中绕组,并把q≥1时定义为分布绕组,就可以方便有效地按照集中绕组的线圈“绕在一个齿上、导线不交叉”的特点对电机绕组进行归类。同时为了方便研究,借鉴文献[3],对集中绕组也引入整数槽和分数槽的概念:当q=1/2时,如2极3槽电机,称为整数槽绕组;当q<1/2时,如8极9槽电机,称为分数槽绕组。对整数槽集中绕组而言,其节距为,节距系数等于0.866。因为每对极下只有每相的一个线圈,每相绕组在磁场中跨过的电角度相同,故绕组的分布系数等于1,因此整数槽集中绕组电动机的绕组系数只有0.866。可见,采用整数槽的集中绕组电机,如结构最简单的2极3槽电机,其绕组系数较低。
不同于整数槽集中绕组,某些采用分数槽集中绕组的电机可以得到较高的绕组系数。

分布系数:

节距系数:

总的绕组系数:

可见,这种8极9槽的分数槽集中绕组的绕组系数大大高于整数槽集中绕组。
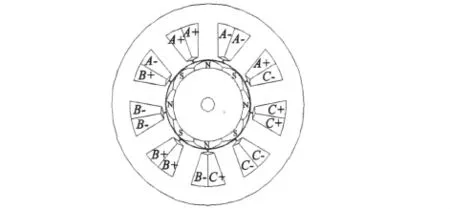
图1 8极9槽电动机结构图
观察图1,其每相绕组所在的3个齿彼此相邻,即沿着圆周按照A相、B相、C相的顺序排列,相与相之间没有交叉,每相绕组相当于独自占据120°机械角度。经过分析,并不是所有极槽数配合的集中绕组都有类似的绕组结构,其它一些具有类似结构的齿槽配合有10极9槽、14极15槽、16极15槽、20极21槽及22极21槽等。它们的共同特点是极槽数很接近,只相差1,可以用下式表示这类电机(2极3槽的整数槽集中绕组除外):

这类电机都具有绕组系数较高的优点,这得益于它们的节距非常接近一个极距。经过计算,它们的绕组系数都在0.95左右,如表1所示。这表明这类电机的绕组利用率很高,并不比传统的分布绕组电机差,而且还具备端部最短等优点。
除了绕组系数高,这类电机还有一个共同优点,即定位力矩较小。这首先可以从理论上得以验证,在文献[7]中以解析的方法推导得出齿槽力矩的表达式:

式中:D为气隙直径;L为电枢长度;n=kS,k=1,2,…;S为极数和槽数的最小公倍数;σ为斜槽角度;Λn为转子旋转时从磁钢出发的磁路的第n次磁导谐波成分;fn为空载气隙磁密的第n次谐波;ξ为转子转过的角度。
由式(7)可知,定位力矩的幅值和n成反比,n越高,定位力矩的幅值就越低;而n可以用槽数S和极数p的最小公倍数来表示。对这类极槽数只相差1的电机来说,定位力矩的次数就是极槽数的乘积。表1同时列出了这些电机的定位力矩次数。从表1中可见,极槽数乘积最小的8极9槽电机脉动次数也将达到72次,根据理论推导,定位力矩会被抑制在很小的范围内。相比之下,2极3槽的整数槽集中绕组每转过一圈定位力矩的脉动数只有6。在下一节,还将用有限元计算的方法对此推断进行验证。

表1 不对称结构电机的绕组系数和一个机械周期中的定位力矩次数
从上述分析可知,这类极槽数只相差1的电机不但具有集中绕组电机的一般优点,而且具有高绕组系数和低定位力矩的独特优点。因此,采用这种极槽数配合的永磁同步电动机适合作为高性能的伺服电机。其中因8极9槽和10极9槽结构的极槽数较少,更具实际应用价值。
但是这类电机有一个共同的问题,就是绕组分布的不对称会造成转子径向受力的不平衡,在下一节将研究这种不平衡力。
2 二维有限元分析
对电机中的电磁场进行二维有限元分析,每个节点的磁场大小可以用下式表示:

式中:A为磁矢位;J0为电流密度,只有轴向分量;Mx、My为每个节点的x方向、y方向剩余磁化强度。
3 不对称结构集中绕组电动机中的径向不平衡力的计算和分析
根据作用力与反作用力原理,转子的受力情况可以通过分析绕组受力得到。对于绕组在空间的分布沿气隙圆周几何对称的电机,如整数槽的集中绕组和分布绕组电机,每个绕组线圈的正端和负端所受的径向电磁力大小相等,方向沿气隙切向方向相同,合成为力矩。但每极每相下绕组的线圈两两形成力偶,合力为零,因此理想情况下电机运行时转子径向合力为0。
但是对于类似8极9槽电机的不对称结构,每相绕组的线圈彼此相邻,不再沿气隙圆周几何对称,因此转子会受到径向不平衡力。下面以两个此类电机为例,用有限元方法计算电机通电时转子受力情况。
首先建立2个此类电机的模型,8极9槽结构如图1所示,10极9槽结构如图2所示。x轴方向和y轴方向如图2中所示。两个电机模型的主要参数为:转子外径15.7 mm,电机长度100 mm,磁钢材料都采用N35SH钕铁硼,定转子铁心材料都采用35DW310,绕组匝数都是237匝。其中8极9槽电动机的气隙长度0.3 mm,槽口长度0.28 mm;10极9槽电动机的气隙长度0.2 mm,槽口长度0.83 mm。
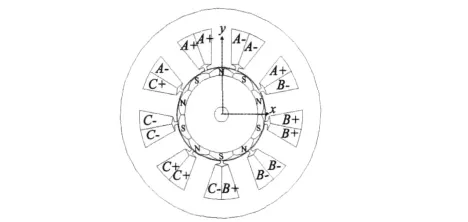
图2 10极9槽电机结构
首先计算得到2个模型转过1/4个电周期时的定位力矩波形,如图3所示。由图可见,两个定位力矩曲线各出现了4.5次脉动,脉动幅值也很小,这符合上一节的理论分析。由于定位力矩很小,计算通电运行过程中转子所受径向合力的时候,可以认为和定位力矩无关,完全是绕组电流和磁场相互作用产生的电磁力。

图3 两种电机在1/4个电周期时的定位力矩波形
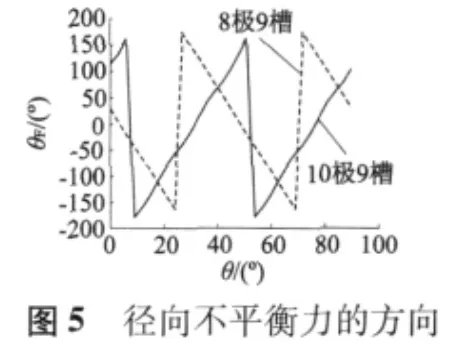
分别给2个模型的3相绕组通以正弦波电流,电流幅值2 A,并且使每相电流的相位和反电动势相位相同以获得最大转矩。计算一个电周期内电机转子此时所受的径向合力的x轴分量、y轴分量及合力幅值,计算结果如图4所示。图5是径向不平衡力的方向。

从图4可以看出,这两种电机径向合力的x轴分量和y轴分量均按正弦规律变化,而且互相正交。而合力的幅值比较平稳,分别有100 N和70 N左右。
由图5可见,在转子沿逆时针正转1个电周期后,径向不平衡力的方向沿圆周转过两圈,这说明径向合力方向的变化率是电周期的2倍,因此径向不平衡力旋转的速度是机械转速的p倍。众所周知,电机运行时机械转速应该避开转子的临界转速,而这种几倍于机械转速的周期性径向力也会引起转子共振,应该尽量避开。
这种不平衡力必定会造成轴承的负担。相比转子径向合力为零的电机,轴承的磨损会明显增大,因此会影响轴承寿命。如果轴承选择不好,会产生严重的噪声,进而带来发热等问题。对这种不对称结构的电机,建议轴承间隙选择尽量小,并尽量选择高质量轴承。同时,如果可以接受极槽数的增加,也可以将上述极槽数相差1的电机极槽数翻番,这样就可以实现几何对称的结构,避免径向不平衡力的产生,如16极18槽。
此外在有些场合,这种不对称结构不能采用,如依靠磁轴承来实现转子悬浮的储能飞轮。
4 结 语
集中绕组永磁同步电动机具有安装简单、端部小的特点。极槽数只相差1的分数槽集中绕组电机还具有较高的绕组系数以及较低的定位力矩,这类电机可以和分布绕组永磁同步电动机一样作为高性能的伺服电机使用。
但是这类电机绕组分布的不对称性,导致运行过程中转子受到明显的径向不平衡力,这种不平衡力幅值较稳定,而且方向不断变化。它的存在会加重轴承的负担,影响轴承的寿命,还可能引起噪声等问题,在使用中必须给予关注。
[1] Cros J,Viarouge P.Synthesis of high performance PM motors with concentrated windings[J].IEEE Transactions on Energy Conversion,2002,17(2):248-253.
[2] 黄平林,胡虏生,余莉,等.集中绕组永磁无刷直流电机电枢反应及绕组电感的计算[J].中国电机工程学报,2005,12(6):127-132.
[3] 吴敬爱,朱东起,姜新建.集中绕组永磁无刷电机的转矩研究[J].电工电能新技术,2003,22(3):59-63.
[4] EL-Refaie A M,Jahns T M,McCleer P J,et al.Experimental verification of optimal flux weakening in surface PM Machines using concentrated windings[J].IEEE Transactions on Industry Applications,2006,42(2):443-453.
[5] Jang S M,Lee S H,Cho H K,et al.Analysis of unbalanced force for high-speed slotless permanent magnet machine with Halbach array[J].IEEE Transactions on Magnetics,2003,39(5):3265-3267.
[6] Jang G H,Yoon J W,Park N Y,et al.Torque and unbalanced magnetic force in a rotational unsymmetric brushless DC motors[J].IEEE Transactions on Magnetics,1996,32(5):5157-5159.
[7] Achermann B.New technique for reducing cogging torque in a class of brushless DC motors[C]//IEE Proceedings.1992,139(4):315-320.
