具有非线性输入的挠性充液航天器自适应模糊控制*
2010-11-07王佐伟郭建新董海鹰
王佐伟,郭建新,董海鹰
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术国家级重点实验室,北京 100190;3.兰州交通大学自动化与电气工程学院,兰州 730070)
随着空间技术的发展以及空间任务要求的提高,现代大型航天器的结构日趋复杂.这些航天器往往带有大型液体燃料贮箱、大型挠性附件(如太阳帆板和天线)以及可转动部件等.以大型地球同步轨道卫星为例,这类卫星通常带有多个液体燃料贮箱和南北两块太阳帆板,贮箱中的全部燃料占整星质量的一半以上,而太阳帆板展开后的挠性基频很低.轨道转移时,系统的动力学非常复杂[1],主要体现在以下几个方面:①液体燃料的晃动带来相应的干扰力矩;②太阳帆板的挠性振动对卫星本体姿态产生干扰;③继电器型的喷气执行机构以及具有饱和特性的敏感器带来了较强的非线性;④燃料的不断消耗导致系统动力学特性变化随时间变化;⑤在工程上液体晃动模型和挠性振动模型通过有限元和地面实验建立,存在参数和结构的不确定性;⑥3个姿态控制通道之间存在动力学耦合.因此,这类航天器在轨道转移时,是带有液体晃动和帆板挠性振动,具有不确定性、时变、非线性的高阶复杂对象,给控制系统的设计带来了较大难度.
对于挠性充液航天器的姿态控制,在工程实践中通常采用经典控制理论进行设计和分析[1-2],这种方法将对象按线性定常系统简化,对于时变特性,采用的主要做法是按特征点分别设计多组控制器.这种设计方法适用范围有限,需要结合工程经验反复校核、折衷.近年来,自适应控制、鲁棒控制等新型控制方法被陆续引入到充液航天器的姿态控制中[3-5].文献[3]研究了液体远地点发动机工作期间卫星姿态的全系数自适应控制问题,取得了比经典控制方法更为优越的结果,但所采用的动力学模型限于单个俯仰通道,忽略了通道间的非线性耦合因素.
挠性充液航天器在轨道机动时,其姿态控制系统一般采用喷气推力器作为执行机构,属于恒定推力的开关式控制.控制算法给出的信号需要通过脉冲调制环节转换为驱动推力器工作的脉冲信号.脉冲调制环节通常由伪速率调制器(PRM, pseudo rate modulator)实现[2],是一种强非线性环节.由于该环节的存在,系统的控制输入属于非线性输入.这种非线性输入的引入大大增加了控制系统分析和设计的难度[6].目前针对死区、饱和等典型非线性输入的控制问题已取得了不少成果[7-9],但尚未见到针对PRM这种复杂非线性输入环节的现代控制算法的研究工作.
基于模糊逻辑系统(FLS, fuzzy logic system)的控制器设计方法在处理非线性、模型不确知问题中效果显著[10].模糊逻辑系统对于非线性系统具有良好的逼近性能,并可有效地利用专家提供的语言模糊信息.本文针对轨道转移阶段的挠性充液航天器的姿态控制问题,提出了一种基于直接型自适应模糊逻辑系统和误差补偿的改进控制算法.在该算法中,将具有自适应学习算法的模糊逻辑系统直接充当非线性控制器,并引入基于饱和函数的稳定补偿律进一步提高控制性能.本文考察的动力学模型为完整的三通道模型,考虑了各姿态通道之间的耦合及高阶未建模因素,研究结果具有较强的实用性.
1 问题描述
1.1 挠性充液航天器动力学模型
不失一般性,假设所考察的航天器由刚性中心体、南北两块挠性太阳帆板以及两个串联型液体燃料贮箱组成.根据工程上的常规做法,按照等效原理建立液体晃动的等效摆模型.在该晃动模型中,全部液体质量分为固定质量和晃动质量两部分.将除去晃动质量后的航天器作为基本体,将本体坐标系OXYZ的原点O取为平衡状态下的基本体质心,如图1所示.下面简要介绍液体晃动等效摆模型的建立过程,详细推导可见文献[1,11].

图1 液体晃动模型示意图
先以一个贮箱为例进行等效摆建模.贮箱中的液体由若干等效单摆组成.记第k个单摆的质量为mk,摆长为lk,摆角为γk1、γk2,悬挂点相对O点的位置矢量为hk,与坐标轴重合的单位矢量分别为X、Y、Z.摆质量的平衡位置矢量为Lk=hk-lkZ.当摆运动时,摆质量的位置矢量为Lk+lkγk,其中γk=γk1X+γk2Y.
第k个摆对航天器本体的作用力(忽略高阶小量)以及对O点的力矩[1]分别为
(1)
mkLk×aR+gZ×mklkγk
(2)

从工程实用的角度建立完整的动力学模型.液体晃动模型取一阶振型,第i个挠性附件的模态向量qi取前5阶振型.将矢量和并矢张量在坐标系OXYZ下以向量或矩阵形式表示.
完整的动力学方程[1]如下:
(3a)
(3b)
(3c)
(3d)
式中:j=1,2表示第j个贮箱中的一阶等效摆;i=1,2表示第i个挠性附件;mb和Ib分别表示基本体的质量和惯量;ζi为第i个挠性附件的结构阻尼矩阵;Λi和ΛSi分别为第i个挠性附件的模态角频率矩阵及角频率平方矩阵;BTi和BRi分别为第i个挠性附件的平动及转动耦合系数矩阵;dj和λj分别是第j个贮箱中一阶晃动振型的阻尼比和角频率;P12为投影算子,作用是在3维向量中取1、2分量;(·)×表示叉乘矩阵.
1.2 控制系统方程及控制目标

(4)
式中:H(·)为时变非线性函数向量,由于其表达式复杂而繁琐,此处从略;Is为整星转动惯量阵;Tc为控制力矩向量.
如前所述,在挠性充液航天器的轨道机动中,其姿态控制系统中包含了强非线性环节PRM.因此,式(4)的方程需要进一步变换为如下形式:
(5)
式中,N(·)表示包括PRM和推力器组合逻辑在内的非线性环节,Uprm为控制律给出的控制输入量.
(6)
式中,C1、C2为方向余弦阵,ω0为轨道角速度.
将式(6)代入式(5)并记X=Φ,可获得如下状态方程:
(7)

根据航天器姿态运动的特点,在小角度的控制要求下,滚动、俯仰、偏航3个通道通常可以分别测量和控制,C1近似为单位矩阵,Is近似为常值对角阵,子系统的耦合影响可以作为干扰处理,则式(7)所示的多输入/多输出(MIMO)系统可以看作由3个解耦子系统组成,每个子系统为二阶非线性系统,表达式如下:
(8)

(9)

就实际的控制系统而言,还有许多具体因素需要考虑.在本文的研究中,姿态敏感器主要是太阳敏感器和速率陀螺,分别用于姿态角和角速度的测量.在分析和仿真中,敏感器的动态特性和测量噪声也是不可忽视的.
1.3 PRM数学模型
PRM是一种强非线性环节(见图2),其输出为单位化的脉冲序列.其脉冲平均值[1,12]可表示为
(10)
式中,h1和h2分别为施密特触发器的开阈值和关阈值,Km>0和Tm>0分别为滤波反馈环节的增益系数和时间常数.
可见,PRM的平均输出值与输入值成正比.在计算机上离散实现时,可进一步将PRM表示为
(11)
式中,Cp(·)是无法用具体解析式描述的非线性函数,其值使得n(uk)为1或-1或0.虽然Cp(·)很难用具体解析式表达,然而利用控制器中包含的模糊逻辑系统却可以对其动态逼近,这正是本文的核心思想之一.
在控制律的设计中应对控制量u限幅,即|u|≤umax,因此Cp是有界的(记其界为Cpm),即满足|Cp|≤Cpm.
2 控制器设计
图2为以挠性充液航天器为对象的单轴控制系统原理框图.图中,虚线框所示部分为伪速率调制器PRM,控制律给出的控制量u经过该环节后被调制成不同脉宽和频率的脉冲序列信号n(u),并驱动相应的推力器给出最终的控制力矩Tc;参数自适应律根据误差反馈对控制律中的模糊逻辑系统的参数进行自动调整.
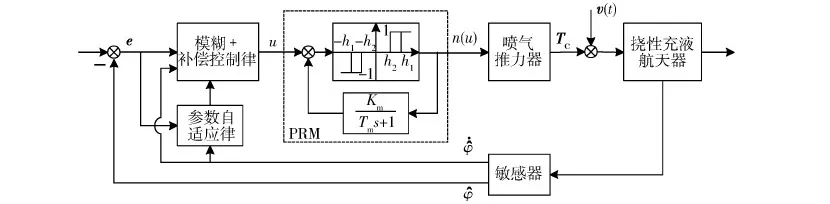
图2 控制系统原理框图
控制律表达式如下:
u=u0+us
(12a)
u0=θTξ(e)
(12b)
us=assat(eTRh)
(12c)
式中:u0项为基本控制律,由模糊逻辑系统FLS实现;us项为稳定和补偿控制律,主要作用是保证大误差情况下的稳定性并对调节误差作进一步补偿.饱和函数sat (·)定义如下:
sat (x)

ATR+RA=-Q
(13)
式中,
显然,如果主动力学f(x)已知,则存在如下理想控制律使得:
将式(12a)代入式(9)并整理可得
(14)

下面基于稳定性要求,考查自适应模糊逻辑系统θTξ(e)的设计.
定义FLS中参数向量θ的最优估计值为
θ*
则FLS的最小广义逼近误差为

根据上述θ*和w*的定义并结合式(11)所示的表达式,可将式(14)重新写成如下形式:

(15)

根据调节误差的定义不难由式(15)得到如下调节误差方程:
(16)
式中,ε
根据式(16)及稳定性要求设计如下形式的参数调节律:
(17)
其中,Mθ为给定的阈值,r2为矩阵R的第2列,P(·)为投影算子[10],表达式如下:
3 稳定性分析
闭环系统的稳定性归结为如下定理.
定理1.对于式(9)所示的非线性系统,如果f(x)和d(x,t)有界,FLS的参数初值满足限定范围,采用式(12)所示的控制律以及式(17)所示的参数调节律,则有:
a)FLS参数和系统状态有界,即‖θ‖≤Mθ,‖x‖≤Mx;
证明.FLS参数的有界性由投影算法加以保证,其证明过程可参见文献[10],不再赘述.下面证明其余结论.选取如下Lyapunov候选函数:
(18)
对式(18)进行时间求导并将式(16)代入得
(19)
将式(17)及us的表达式代入式(19)得
式中:若式(17)的第1式成立,有L1=0;若式(17)的第2式成立,有L1=1.
根据参数调节律的特点和投影算法的性质[10],可知上式中最后一项非正,因此有
根据ε的定义及其组成部分的物理意义,|ε|max是存在的.根据饱和函数的定义,则
1)当|eTr2b|<δs时,有
2)当|eTr2b|≥δs时,同理有
只要适当选择参数使之满足as>Km|ε|max,则有

4 数学仿真
以一类带有两个串联燃料贮箱、两翼挠性太阳帆板、一个挠性伞状天线的静止轨道卫星为假想对象,利用数学仿真验证本文提出的控制方法.
在数学仿真中,干星的惯量质量及帆板挠性模态频率等参数设置如下:
md=2180 kg,
Λ1=Λ2=diag{0.18,0.40,1.10,1.25,3.35} Hz,
Λ3= diag{1.10,1.80,2.50,2.61,2.68} Hz.
本文主要考查液体发动机远地点变轨时的姿态控制性能.在变轨过程中,考虑如下几种干扰力矩:①远地点发动机点火产生的干扰力矩,三轴分别为[4.87, 4.87, 0.1] N·m;②太阳光压力矩,缓慢变化,最大值约1×10-4N·m;③其他干扰力矩,假设为零均值、均方差2×10-4N·m的白噪声.
其他仿真条件如下.角速度由速率陀螺测量,测量误差:残余常值漂移0.15(°)/h、噪声均方差0.15(°)/h.滚动和俯仰姿态角由太阳敏感器测量,测量误差:均值0.02 °、均方差0.03 °.偏航姿态角由积分陀螺测量,测量误差:均值0.02 °、均方差0.01 °.采样周期0.064 s.初始条件为:姿态角速度分别为[5×10-3,-5×10-3,-8×10-3] (°)/s,姿态角分别为[0.2, 0.2, 0.3] °;贮箱充液比80%,晃动位移0.005 m.假设远地点发动机点火10 min.
模糊系统的隶属度函数取为高斯型,每个变量的模糊规则数目为5条.在初始规则的设置中,利用了从已知动力学和控制特性中直观得到的语言模糊信息.系统主要参数如下:
采用常规控制算法(由PID和系列滤波器组合而成)的仿真结果如图3~5所示,600 s内三轴姿态控制累积喷气时间为175.0 s、140.3 s、6.3 s.采用本文算法的仿真结果如图6~8所示,三轴姿态控制累积喷气时间为178.1 s、139.1 s、6.3 s.
可见,与常规控制算法相比,在喷气消耗量大体相当的情况下,本文提出的控制算法在超调量、过渡过程时间、稳态精度等方面具有更好的控制效果.其主要原因在于:与常规控制算法相比,模糊逻辑系统对复杂非线性对象具有更好的逼近和适应能力,而本文给出的稳定补偿律进一步提高了对控制误差的反馈抑制能力.
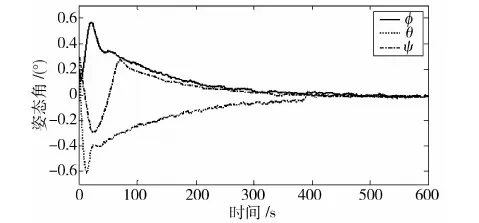
图3 星体姿态角(常规算法)
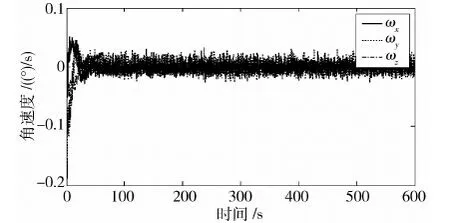
图4 星体姿态角速度(常规算法)
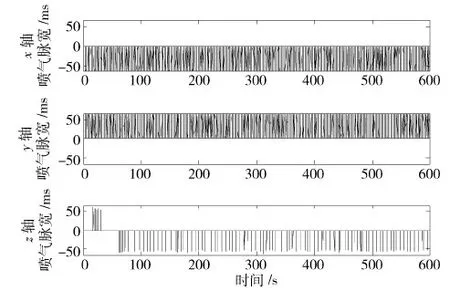
图5 喷气脉冲(常规算法)
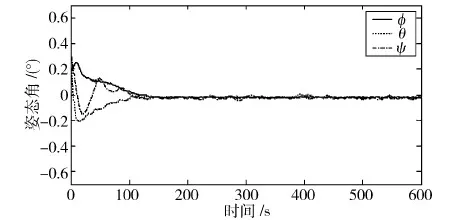
图6 星体姿态角(本文算法)

图7 星体姿态角速度(本文算法)
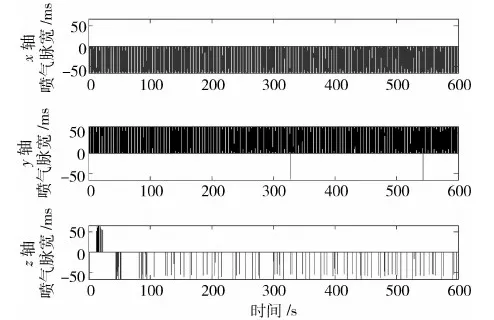
图8 喷气脉冲(本文算法)
5 结 论
大型挠性充液航天器的动力学比较复杂,控制难度较大.本文针对这类复杂航天器变轨过程中的姿态控制问题,研究了一种基于直接型自适应模糊逻辑系统和误差补偿的稳定控制算法,分析了闭环系统的稳定性.仿真结果表明,本文提出的控制算法效果良好,计算量不大,具有一定的应用价值.