动态情况下星敏感器探测灵敏度研究
2010-11-07李晓,赵宏,卢欣
李 晓,赵 宏,卢 欣
(1.北京控制工程研究所,北京 100190;2.中国空间技术研究院,北京 100094)
星敏感器的探测灵敏度是指星敏感器能够探测到的最弱星等的能力,探测灵敏度的高低决定了视场内恒星的数量.在动态情况下,星像在像平面不断移动,与静态情况相比,星光产生的有效信号电荷分散到更多像元,从而降低了星敏感器的探测灵敏度.
本文以从噪声中检测信号的理论为基础,通过分析像元输出模型,得出单个像元被探测到的条件;进而通过研究星像提取方法和动态情况下星像能量分布特性,推出星像被提取的条件;最后以给定的星敏感器参数为例进行计算和分析.
1 动态情况下星像能量分布特征
在静态情况下,星像能量满足正态分布,点扩散函数可以用二维高斯函数来表示[1]:
(1)
式中, (xc,yc)表示星像中心的实际位置,σPSF为高斯半径,表示点扩散函数的能量集中度.
动态情况下,由于在曝光期间星像中心一直在移动,星像能量分布可以用如下函数表示:
(2)
式中,Te为曝光时间,xc(t)和yc(t)为时刻t(0≤t≤Te)的星像中心位置坐标.考虑到星体角速度一般不大于2(°)/s,曝光时间不大于0.5s,星像中心轨迹很短且近似为直线,因此近似认为xc(t)和yc(t)是线性函数.设星像中心轨迹为线段L,其参数方程为:
(3)
式中,u为星像中心移动速率,θ为轨迹与x轴夹角.设l为轨迹L的长度,l=uTe.将式(3)代入式(2),并令积分变量t=τ/u得出星像能量分布函数:
(4)
可以看出,在高斯半径一定的情况下,星像能量分布函数只与初始位置(x0,y0)、轨迹L的长度l和轨迹与x轴的夹角θ有关.
2 星像的提取方法
星像的提取通常需要经过两步:
(1)图像的半阈值化
采用全局阈值的方法对图像进行阈值分割,目的是将含有有效信号的像元检测出来,从而确定星像所处区域.阈值由实时得到的图像数据计算获得:
Gth=E+αδ
(5)
式中,E为整幅图像所有像元的灰度均值,δ为整幅图像灰度的标准差,α可根据需要设定.半阈值化函数如下:
(6)
(2)连通域分析
对半阈值化后的图像IT(x,y)进行连通域提取,并通过判断连通域中的像元数目剔除孤立噪声点,获得星像区域.一般要求连通域中的像元数目不小于4,小于4的连通域被认为是孤立噪声点予以剔除.因此星像被提取的条件是,星像区域中大于阈值的像元能形成一定面积的连通域.
3 含有效信号的像元探测
3.1 像元输出模型
星敏感器像元噪声有多种,为简化分析过程,只考虑暗电流噪声、光子散粒噪声、读出噪声、背景噪声和量化噪声,而将其它噪声一并归入读出噪声进行分析.
像元产生的电荷数可用如下的随机变量来表示[2]:
N=Ns+Ndark+B+Nron
(7)
(8)
设像元输出灰度I与像元产生的电荷数N满足如下正比关系:
(9)
m为比例系数,n为量化位数,Nsatu为饱和光电子数.量化过程中会产生服从0~1均匀分布的量化误差,其方差为1/12.所以像元输出灰度I的均值E(I)和标准差为:
(10)
设σquan为量化噪声的等效电荷数:
(11)
则像元输出灰度I的均值E(I)和标准差为:
(12)
恒星在曝光时间Te内产生的总信号电荷数μ0为:
(13)
式中,E0(λ)为零等星λ波段的辐照度,M为星等,D为镜头口径,Eph为单个光子能量,QE(λ)和τ0(λ)分别为λ波段的量子效率和光学系统透过率,Kfill为填充系数.像元产生的有效信号电荷μs可根据总信号电荷数和星像能量分布函数确定.
暗电流μdark可以按如下公式计算:
μdark=JdarkSTe/q
(14)
式中,Jdark为暗电流密度,S为像元面积,q为一个电荷所带电量;背景噪声μB相当于10等星产生的电荷数,读出噪声σron和量化噪声σquan为常数,可根据星敏感器的参数获得.
3.2 含有效信号的像元探测
图像半阈值化的目的是将含有效信号的像元提取出来.根据从噪声中检测信号的理论,从噪声中提取目标像元存在两个指标:一是将目标像元有效提取的概率称为探测率PDET;二是将非目标像元判断为目标像元的概率称为虚警率PFA.理想的探测系统应当使探测概率达到最大,虚警概率达到最小,但两者不可能同时达到最佳,能做到的只是保证虚警概率为某个许可值时,而使相应的探测概率尽可能大[4].

(15)
(16)

(17)
(18)
式中积分上限L为:
(19)
当给定虚警概率PFA和探测概率PDET指标时,通过查正态分布表,可以获得PFA对应的TNR值和PDET要求的最高积分上限Lm.定义像元的信噪差比SNDR为:
SNDR=-L
(20)
则像元满足探测概率的条件为:
SNDR≥-Lm
(21)
根据TNR的定义,理论阈值Gth=TNR·σn+In,由于实际图像处理过程中无法获得σn的精确值,可以用实时图像的样本均值和标准差作为其真值的估计,即E≈In,δ≈σn.故式(5)中系数α等于阈值噪声比TNR.
4 动态情况下星敏感器探测灵敏度
4.1 星像被提取的条件
由星像的提取方法可知,星像能够被提取的条件是:灰度大于域值的像元能形成一定面积的连通域.为便于分析,将星像轨迹区域的像元进行分类,如图1所示.图中斜线为星像中心轨迹L,根据L的走向确定星像区域像元的分类方式,若L的行跨度比列跨度大,则选择按行分类方式,反之选择按列分类方式.当选择按行(列)分类方式时,在每一行(列)像元当中,含有有效信号电荷最多的像元定义为p像元,含有有效信号电荷仅少于p像元的定义为w-1像元,依次类推定义w-2像元、w-3像元……w-n像元.
在同一星像轨迹中,不同的w-1像元所含有的有效信号电荷不尽相同,将其中含有有效信号最少的像元定义为w-1m像元.若w-1m像元满足探测条件SNDR≥-Lm,所有w-1像元和p像元显然满足探测条件,经过图像半域值化,p像元和w-1像元可以形成一定面积的连通域,星像就能够被提取.因此星像能够被提取的条件为:w-1m像元满足探测条件SNDR≥-Lm.
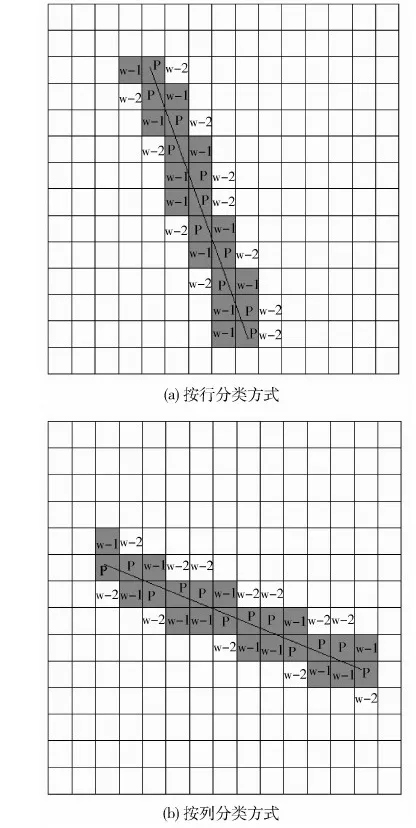
图1 像元分类示意图
4.2 星敏感器的探测灵敏度计算
星敏感器的探测灵敏度是指星敏感器能够探测到的最弱的星的能力.星等越大,产生的有效信号电荷μ0越小,相应的w-1m像元越不易被探测,星像越不易被提取.
设η为w-1m像元生成的信号电荷μsw-1m占总信号电荷μ0的比例:
∬Asw-1mg(x,y)dxdy
(22)
式中,Asw-1m为w-1m像元所在区域;g(x,y)为信号电荷分布函数,只与星像中心轨迹L的长度l,与x轴夹角θ,初始位置(x0,y0)有关.对于确定的星像中心轨迹,η可以通过数值计算得出,而与总信号电荷μ0无关.
当给定虚警率和探测率指标时,TNR和Lm可获得.由式SNDR≥-Lm可确定μsw-1m的最小值,再根据式(22)可以确定总信号电荷μ0的最小值,最后根据式(14)可确定星等的极限值,即星敏感器的探测灵敏度.
实际情况中,η随l、θ、(x0,y0)的变化而变化,是不定值.因此,为保证求出的极限星等在任何情况下都可以被探测到,η应取最小值进行计算.在l确定的情况下,当θ=0且星像中心轨迹L位于p像元中心线时,调整y0的位置,可使η取得最小值ηmin.因此当给定角速度的模ω,求对应的探测灵敏度时,应令角速度的方向平行于y轴或x轴,求得η的最小值ηmin.
当σPSF=1像元时,通过数值计算可得出不同的l对应的ηmin,如表1所示.
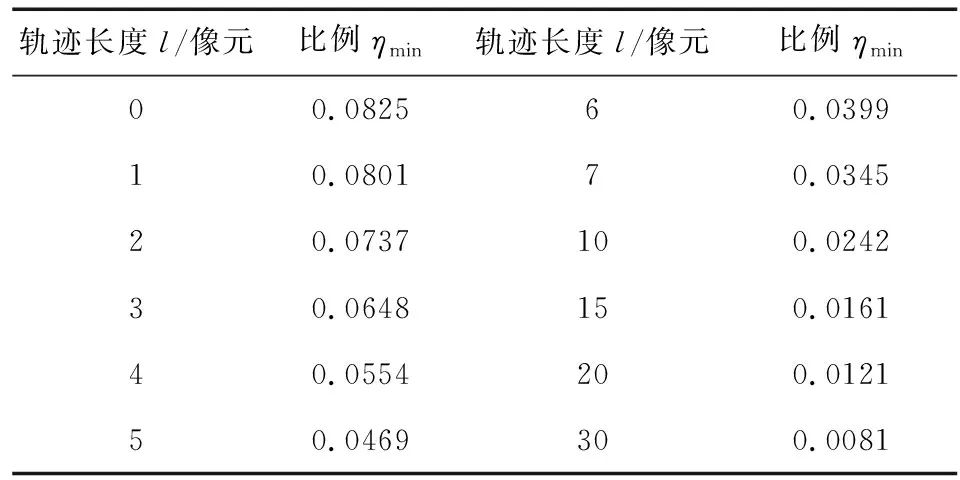
表1 σPSF=1时w-1m像元有效信号占总信号的最小比例ηmin
可以看出,当长度l>5时,ηmin与轨迹长度的乘积近似为定值0.242,因此ηmin近似计算为:
(23)
对于不同的高斯半径,都可以采用数值计算的方法近似得出ηmin与轨迹长度l的关系.轨迹长度l可由式(24)来估算:
l=fωTe
(24)
式中f为焦距,其单位是像元.
4.3 给定星敏感器的探测灵敏度计算实例
表2给定了星敏感器的典型参数,以此为例计算动态情况下星敏感器的探测能力.
图3给出在虚警率PFA=0.01、探测率PDET=0.99,即TNR=2.33、Lm=-2.33时,给定星敏感器在不同的曝光时间下的探测灵敏度.
可以看出,探测灵敏度随角速度增大而减小.同时可以看出,在角速度较小时,曝光时间越长,探测灵敏度越高;而当角速度较大时,增加曝光时间并不能提高星敏感器的探测灵敏度,因为像元接收的信号电荷并没有随着曝光时间的增加而增加,相反暗电流噪声和背景噪声会随曝光时间增加而增加,从而使探测灵敏度略有降低.
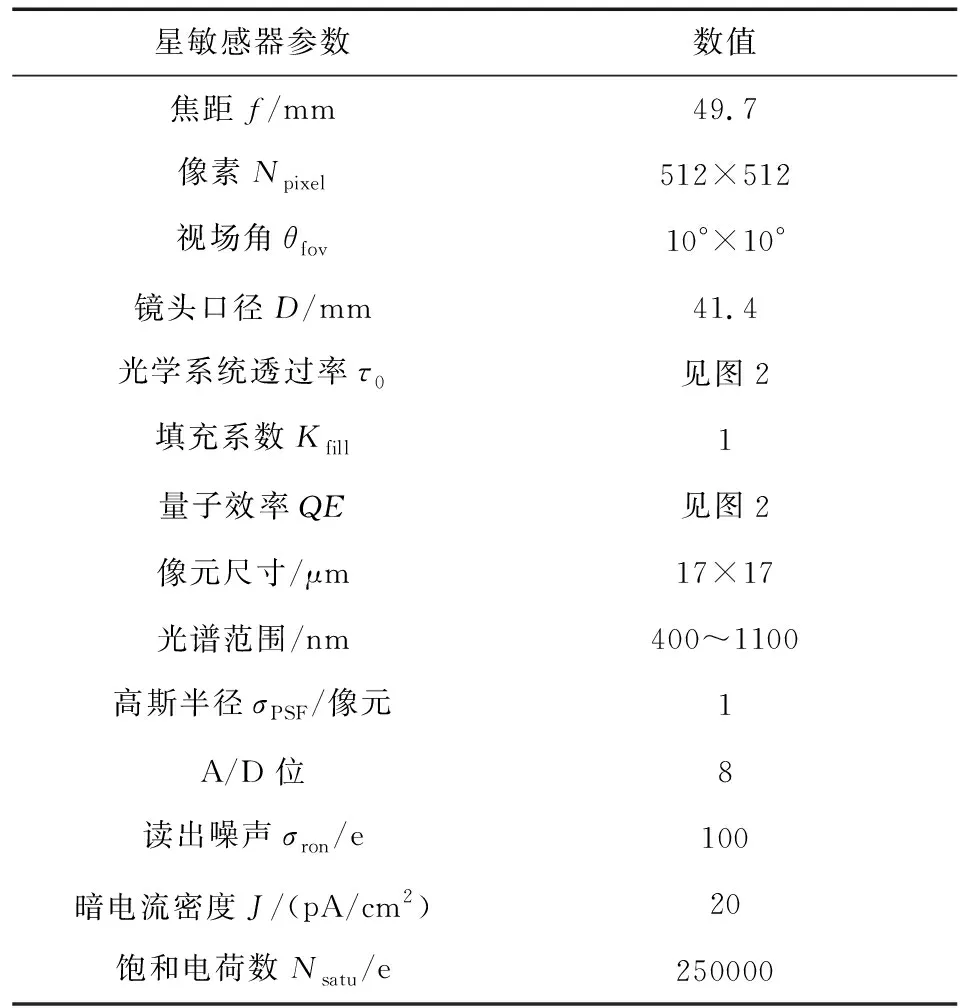
表2 给定星敏感器的参数
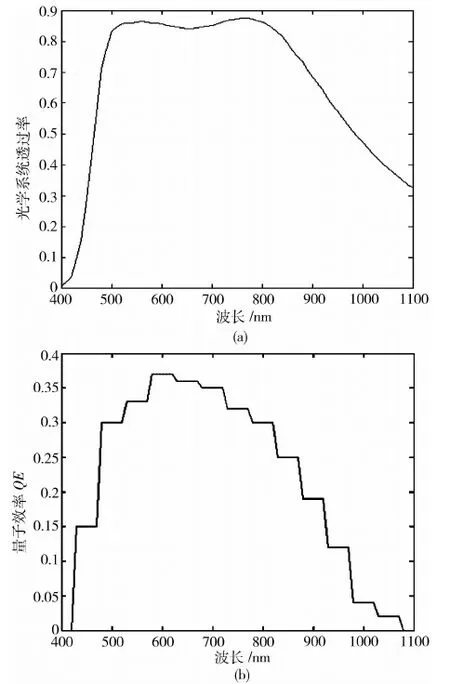
图2 给定星敏感器的光学系统透过率和量子效率
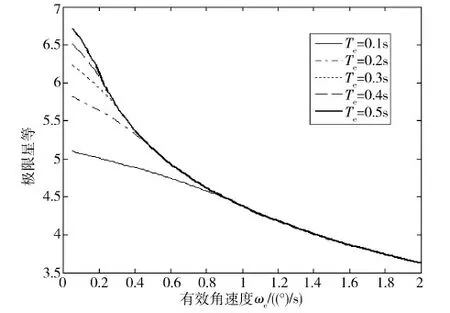
图3 给定星敏感器在不同曝光时间下的探测灵敏度
5 结 论
本文从探测率和虚警率的角度分析了像元能被探测到的条件;并根据像元输出模型和星像提取方法,论证了用w-1m像元的信噪差比来判断星像能否被提取的可行性;最后以给定星敏感器参数计算动态情况下的探测灵敏度,得出在角速度较大时增加曝光时间并不能提高探测灵敏度的结论.