基于准滑模控制的空间拦截末制导律设计
2010-11-07王国梁郑建华
王国梁,郑建华
(1.中国科学院空间科学与应用研究中心,北京 100190;2.中国科学院研究生院,北京 100049)
随着现代战争格局的改变和航天需求的增大,空间拦截显得日益重要.而末制导的精确与否决定拦截器最终能否拦截到目标.关于空间拦截的制导律问题很多人都已经研究过,如比例导引律[1-2]、非线性制导律[3-4],这些控制方法有的比较复杂,使用起来不方便,需要发动机提供变推力,工程实现较难,而且不具有抗外界干扰能力.理想滑模控制虽然具有对外界干扰的不变性,但是存在抖振问题[5].
本文针对发动机工作特性,依据准滑模控制思想提出一种操作起来简单,又能控制精度的末制导律.该制导律易于工程实现,而且当边界层趋于零时,具有很好的抗干扰性.
1 空间拦截问题的数学描述
本体坐标系及视线坐标系的数学描述如图1所示.其中:本体坐标系为Oxbybzb,其坐标原点O定义在拦截器质心,在零姿态情况下,Oxb为拦截器滚动轴,指向卫星飞行方向,Oyb为拦截器俯仰轴,Ozb为拦截器偏航轴,指向地心;视线坐标系为Oxsyszs,其坐标原点O定义在拦截器质心,Oxs由拦截器质心指向目标航天器质心,Oys和Ozs由本体坐标系通过高低角θ和方位角φ来确定.
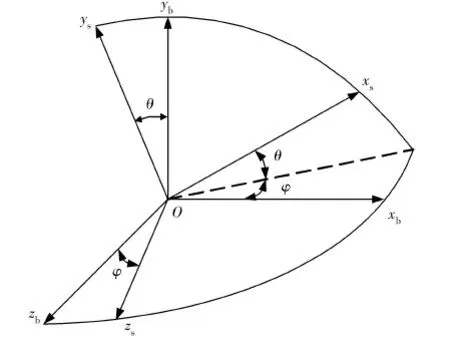
图1 视线坐标系和本体坐标系
两坐标系之间的转换关系如下:
(1)

(2)
式中,x1是拦截器和目标航天器的相对距离,x2是拦截器和目标航天器的相对速度,x3是纵向平面的视线角速度,x4为横向平面的视线角速度,u1是拦截器在zb轴上的推力加速度,u2是拦截器在yb轴上的推力加速度.
控制时,可以对纵向平面和横向平面分别进行控制.
对纵向平面的控制可以表示为
(3)
对横向平面的控制可以表示为
(4)
2 制导律设计
以纵向平面控制为例,采用准滑模控制方法进行制导律设计.
空间拦截最终要实现拦截器以一定的速度撞击目标,这就要求x1=0而x2≠0.选取切换函数
s=x3
(5)
这样就可以保证拦截器以一定的速度撞击目标.

(6)
式中Tb为允许的最大脱靶量,B为盲区最大允许范围,tf为进入盲区的时刻.
选取制导律为
(7)
式中U为发动机提供的推力加速度.
如果Δ选取得太大,精度就达不到要求,会产生脱靶现象;如果Δ选取得太小,就会造成发动机的频繁开关机,不能有效地减少抖振.Δ的选取与x3所要达到的精度有关,即与脱靶量有关.
横向平面的控制与纵向平面的控制类似.
3 数学仿真
设仿真初值为:x1(0)=5×104m,x2(0)=-2.5×103m/s,x3(0)=6×10-4rad/s.发动机提供的加速度U=10m/s2.制导律中,边界层Δ取为1×10-5.采用准滑模控制,仿真结果如图2~5所示.
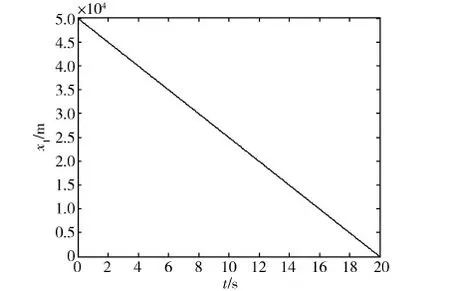
图2 采用准滑模控制时相对距离随时间的变化
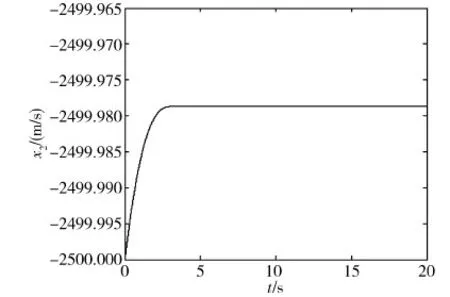
图3 采用准滑模控制时相对速度随时间的变化

图4 采用准滑模控制时视线角速度随时间的变化
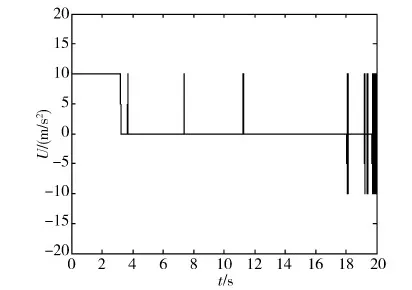
图5 采用准滑模控制时发动机开关状态
从图2~5的仿真结果可以看出,在准滑模制导律的作用下,视线角速度保持在预定的精度范围内,使得相对距离能够收敛到满足脱靶量要求的数值,从而保证拦截器以一定的相对速度撞击目标.而且这种制导律操作简单,控制过程中开关机频率不是很高,易于工程实现.
如果采用理想滑模控制,即Δ=0,仿真结果如图6~9所示.
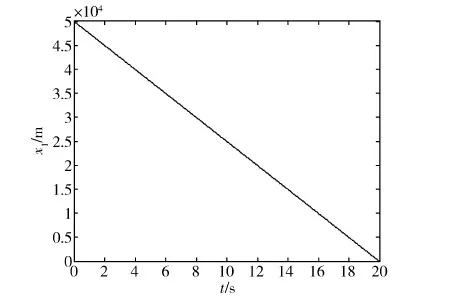
图6 采用理想滑模控制时相对距离随时间的变化
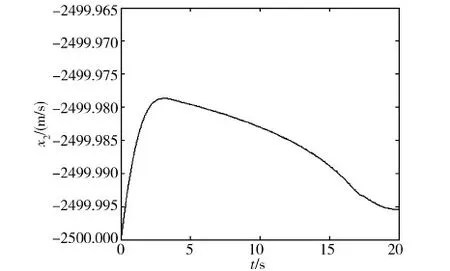
图7 采用理想滑模控制时相对速度随时间的变化
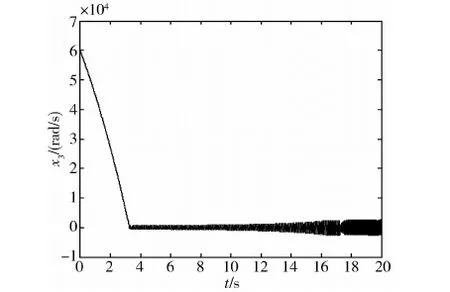
图8 采用理想滑模控制时视线角速度随时间的变化

图9 采用理想滑模控制时发动机开关状态
对比图5和图9可以看出,采用准滑模控制后,发动机的开关机频率明显降低,有效地抑制了抖振,而理想的滑模控制发动机的开关机则过于频繁,在实际应用中很难实现.
4 结 论
本文主要研究了准滑模制导律在空间拦截中的应用,并进行了数学仿真和对比.仿真结果表明:采用准滑模控制有效地降低了发动机的开关机频率,削弱了抖振,并能够控制精度,实现最终的空间拦截;而且该制导律相对简单,易于实现.
