Pro/E的运动仿真在平面四杆机构教学中的应用
2010-10-26谢朝晖益阳电子工业学校413000
谢朝晖 益阳电子工业学校 413000
Pro/E的运动仿真在平面四杆机构教学中的应用
谢朝晖 益阳电子工业学校 413000
运动仿真可将静止抽象的机构动态化和具体化,平面四杆机构的教学效果在Pro/E环境中得以淋漓尽致发挥,不仅可以观察到各构件的组装情况,还可以进行运动仿真和运动分析,是中职《机械基础》课程教学与Pro/E软件CAE功能应用的完美结合。
平面四杆机构;Pro/E;CAE;运动仿真;运动分析
引 言
在职业中专学校任教机电专业课程多年,后接触Pro/E软件,通过几年的学习,不禁为其强大的功能所折服,特别在CAE(计算机辅助工程)功能方面,可以充分应用到《机械基础》的教学中。下例便是基于Pro/E环境中的平面四杆机构的运动仿真和运动分析。
1.建立四杆机构所需构件
1.1 新建文件
图一
启动P r o/E,新建文件:选“零件”/“实体”,文件名默认。
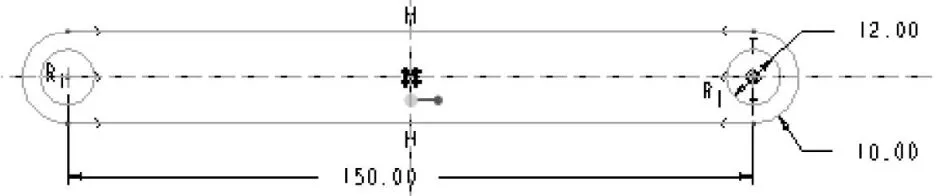
我们可以使用两次拉伸的方法建立四杆机构的第一个构件——机架。见草绘图(图一)。
1.2 生成机架实体
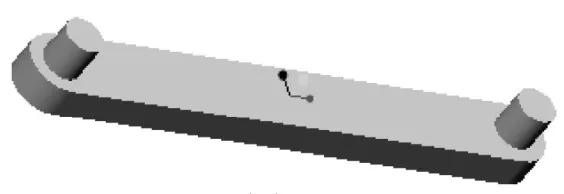
底板拉伸深度10,圆柱销拉伸深度12。如(图二)。选择“文件”/“保存副本”,输入新文件名“sg01.prt”。
图二
1.3 生成其余构件实体
为提高效率,可在上述实体的基础上,再次进行编辑修改,完成后选择“文件”/“保存副本”,输入新文件名“sg02.prt”,继续进行编辑修改,完成后“保存副本”,表1为各文件名。
机构类型判定:最长+最短(180+70=250)≤其余两杆长度之和(150+130=280),且最短杆为连架杆。机构类型为曲柄摇杆机构。
2.构件组装
构件组装在Pro/E中完成,即利用其“组件/设计”模块。
2.1 新建装配文件
执行“文件”/“新建”,选“组件”/“设计”,输入文件名“sgjk.asm”,进入实体装配环境。
2.2 装配机架
Pro/E中的装配类型分为约束和连接,约束类型相对两零件只能为固定状态,而连接可以是活动状态,且组装完成后要为完全约束或完全连接定义状态。
执行“插入”/“元件”/“装配”,打开机架文件sg01.prt,约束类型为“缺省”。
2.3 装配曲柄
执行“插入”/“元件”/“装配”,打开曲柄文件sg02.prt,连接类型为“销钉”(图三),即《机械基础》教材所指的铰链连接,运动副为低副中的转动副。放置方式为轴与轴对齐,面与面对齐,并分别选择两构件几何特征,操控板显示“完全连接定义”状态。图四为完成曲柄装配后的效果图。Ctrl+Alt+鼠标拖动曲柄,可以动态观察曲柄绕机架圆柱销转动情况。

图三

表1

图四

图五
2.4 装配摇杆
摇杆和曲柄均为连架杆,摇杆文件为sg04.prt,方法同曲柄的装配方法。
2.5 装配连杆
执行“插入”/“元件”/“装配”,打开连杆文件sg03.prt,首先与曲柄连接,连接类型为“销钉”,单击操控板“放置”/“新设置”,增加与摇杆的连接,并进行相关几何特征选取。完成后如图五,Ctrl+Alt+鼠标拖动曲柄,可以动态观察曲柄带动连杆、摇杆运动,而且,曲柄只可转动,摇杆只可摆动。
3.运动仿真
3.1 基本原理
Pro/ENGINEER作为CAD/CAM/ CAE系统集成软件,为用户提供了全方位的产品开发功能,集零件设计、产品组装、机构设计与分析、模具设计与数控加工、工程图绘制等功能于一体,可为用户构成十分便捷、功能强大的设计及分析工作平台,解决大量原本看来可能较为棘手的工程问题。机械工程中较为常见的机构可充分利用Pro/ENGINEER的产品组装及机构仿真与分析功能,进行机构设计、仿真及动态分析。
3.2 运动仿真基本步骤
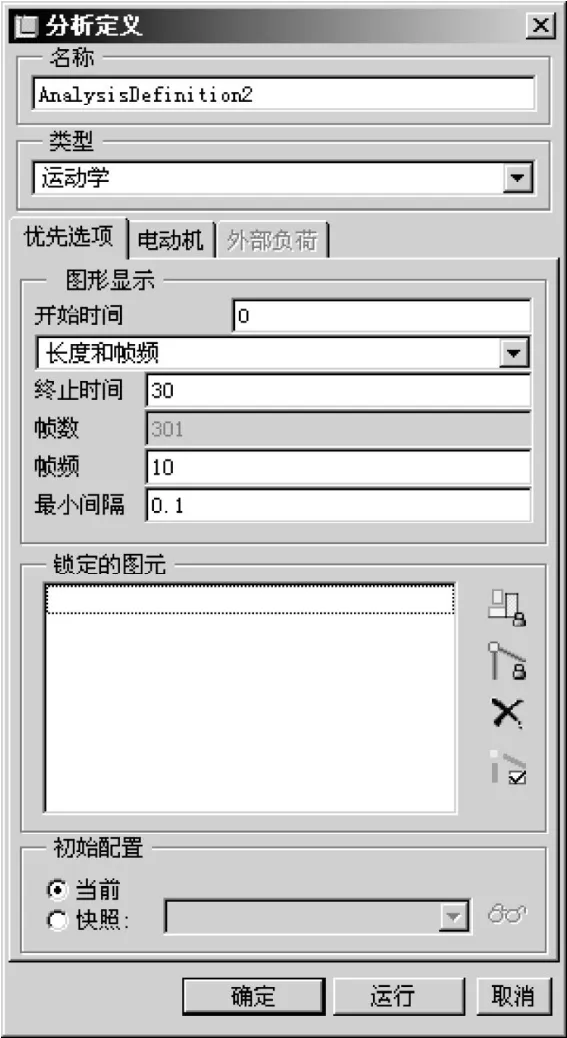
3.2.1 进入运动仿真环境。执行“应用程序”/“机构”,进入机构运动仿真环境,窗口左侧出现运动仿真特征树,右侧显示运动分析工具栏。
切换到“轮廓”选项卡(图八),选“速度”,A处输入“20”,数值越大,运动速度越快。

图六

图七
4.运动分析
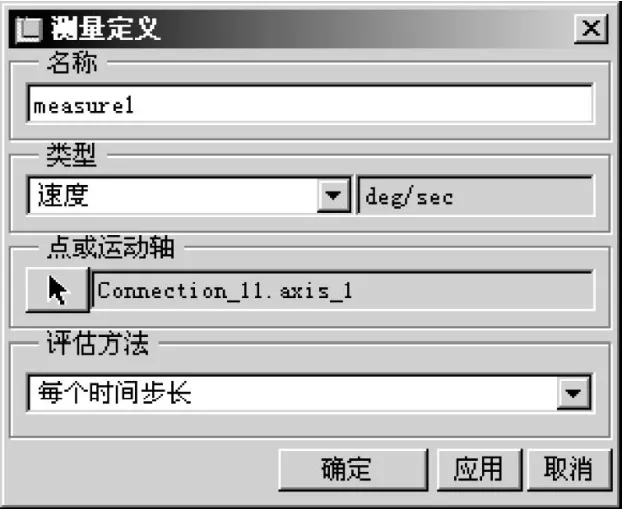
4.1 生成摇杆速度与时间关系的运动分析图
图九

图十
4.2 其它运动分析
(1)死点位置分析,以摇杆作为主动件,可以发现连杆与曲柄共线时,运动不确定或无法运动,这是机构的死点位置;
(2)急回特性观察,动画演示中,返回行程要明显快过工作行程;
(3)全局干涉,检测机构在运动中,实体之间相互是否产生运动干涉;
(4)运动轨迹线描绘和构件包络描绘;
(5)机构类型判定,改变各杆件长度,重新装配,得到的运动规律一定符合各机构类型的固有规律,有力地检验了杆长条件和最短杆条件的四杆机构类型判定理论。

图十一
图十二

图十三
5.结束语
Pro/E的CAE功能异常强大,在《机械基础》、《模具设计基础》等专业课程教学中,将平面的、静止的研究对象(如凸轮机构、齿轮传动、冲压模工作过程等),清晰、生动、形象地展示在我们面前,难点也变得容易理解。
[1] 金潇明.机械基础.湖南:湖南科学技术出版社.2003
[2] 顾淑群.机械基础.北京:人民邮电出版社.2007
[3] 欧阳波仪.Pro/ENGINEER中文野火版软件应用技术.北京:人民邮电出版社.2006[4] 高秀华.机械三维动态设计仿真技术
(ProENGINEER和ProMECHANI应CA用).北京:化学工业出版社.2003
[5] 李雷,黄恺,高奇.Pro/E产品装配与机构仿真.北京:化学工业出版社.2009
谢朝晖(1973~),男,湖南省益阳市人,1995年本科机电专业毕业,现任益阳电子工业学校模具专业教师。
