基于转速测量的风力机独立控制仿真
2010-10-22张一工
张 博,张一工
(华北电力大学,北京 102206)
0 引言
目前,风能是发展最快、最具竞争力的新能源之一。风力发电技术的各个方面都得到了迅速的发展,各种新式的风力发电机、功率变流器、先进控制等技术都得到了广泛的应用[1-15]。然而风力发电有其自身的缺点:自然界中风的变化具有很强的不确定性和随机性,这为风力发电机组的稳定运行及控制带来极大的挑战;风力发电场大多地处偏远,环境恶劣,这给风力发电机组的调试与检修带来极大的困难和极高的成本。这些迫切需要在实验室条件下对风力机进行深入研究。本文采用MATLAB/Simulink仿真软件对风力机的运行状态和控制策略进行讨论,Simulink能够显示模型所示实物的实际运动形式[16]。
风力机的正常运行状态分为:1.额定风速以下发电机的最大风能捕获控制状态 (此时并未对风力机施加控制);2.额定风速以上风力机的桨叶节距角的控制状态。在实际的风力发电机组中,基于风速测量的控制策略缺乏实用性、准确性与可靠性。原因如下:1)风速的快速变化及不同测风点的风速测量值存在差异;2)风力计本身存在测量误差;3)当系统发生故障时,基于风速测量的控制策略不能使风力机组拥有低电压穿越能力(LVRT)。文献[17]采用了风速估计的算法,但同时增加了控制策略的复杂性。众所周知机械转速测量非常简单可靠,因此本文将额定风速上的桨叶节距角β(Beta)控制策略转化为风力机额定转速以上的β控制,并以一种简单的控制方式将1,2两种工作状态联系起来。
风力机自身存在其物理特性:确定的风力机转速,风速与桨叶节距角产生确定的空气动力矩,空气动力矩可以突变。风力机通过传动轴带动发电机转动。空气动力矩与负载力矩共同作用造成风力机转速的变化,发电机侧的控制策略仅对风力机产生间接影响。目前大多数文献不区分发电机侧与风力机侧的控制策略,通过风力机模型计算风力机最佳转矩或转速作为参考状态,直接控制系统使其稳定在参考状态下,如[18][19],然而这种方法其动态过程并不符合实际的物理特性。为反映风力机真实的运行状况。本文将发电机视为风力机的负载转矩,独立研究风力机额定转速以下的自由特性,及额定转速以上的受控特性。
1 风力机的数学表达
根据空气动力学,风力机产生的空气动力矩为:
式中,Ta为风轮产生的气动转矩,N·m;ρ为空气密度,kg·m3;A为桨叶扫掠的面积,m2;R是风轮半,m;速,m/s;ω为风机角速度,rad/s;β为桨叶节距角。
另外系统从风轮获得的风能为:
忽略摩擦,系统的轴系动态模型为:
式中,J为风轮的转动惯量,kg·m3。 Te为发电机负载的电磁转矩。
据有关资料的记载和研究[20],风能利用系数可近似表示为:

通过变化参数x可改变风力机运行的速度范围。本文中取x=25。
2 实验模型的搭建
2.1 风力机运行的物理过程分析
实际的风力发电机组中运行过程为:设此时风速为额定风速,风力机启动,空气动力矩Ta随着转速的增加而增加,此时对发电机侧施以最大风能捕获控制,则其电磁转矩Te相应的增加。当风力机转速达到额定值时,Ta按风力机转矩曲线达到最大值,Te最终也达到最大值并与之相互平衡。风力机组达到额定工作点并进入恒功率控制阶段。发电机采取定电磁力矩控制。在理想条件下对于风力机相当于定负载转矩Te恒定而无波动。由P=ωTe需要进行风力机转速ω恒定控制才能使功率保持恒定。若此时风速突变高于额定风速,风力机转速升高,风力机组进入2状态,通过控制桨叶节距角β使空气动力矩与转速能够跟踪其原设定值。额定工作点为风机运行状态1,2的临界点,额定风速以上的β角控制与风力机额定转速以上的β角控制等效。
2.2 仿真模型分析
根据以上指导思想搭建出仿真系统如图1。
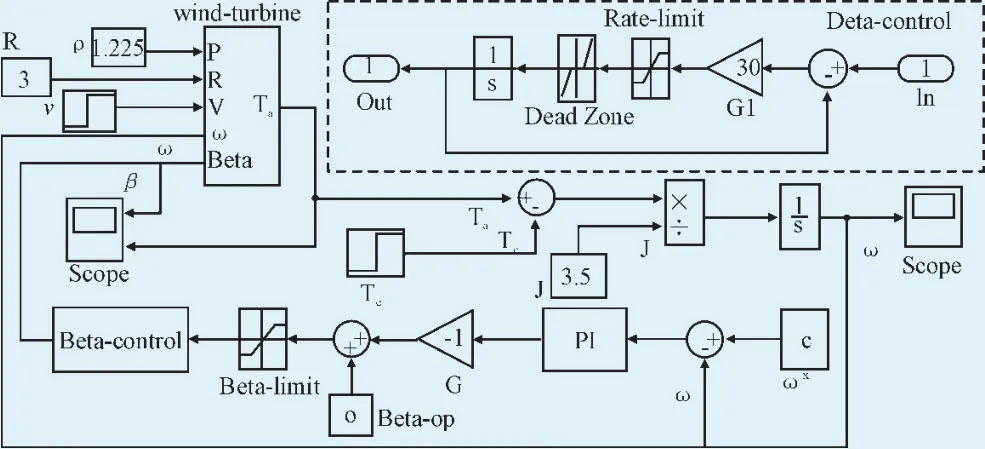
图1 仿真系统
系统包含3个子系统:Wind-turbine子系统,PI调节子系统,和Beta-control子系统 (细节见虚线框内)。 对于Wind-turbine,R与ρ为定值,ω,v的变化引起空气动力矩Ta的变化。Ta与发电机电磁力矩Te之差作用在风机转动惯量上,经积分得到风力机的转速ω。ω与风力机机参考转速相比较,差值经PI调节与Beta-control最终输入Wind-turbine形成闭环。图中增益G=-1规定了β角的开启方向:当风力机转速大于额定转速时,β角开启。本文系统对β设定了死区使其在0°~15°之间变化,当转速小于额定值时,β保持0°,相当于Beta-control子系统被闭锁。此系统简单地将风力机的2种运行状态统一起来。
Wind-turbine所模拟的风力机为沈阳风电SUT200 kW,其参数为:桨叶半径:12 m,叶轮转动惯量:350kg·m3,额定转矩:8100N·m,额定功率:200 kW,空气密度:1.225 kg·m3,额定转速:12.5 rad/s,额定风速:15 m/s。
Beta-control所模拟的是电动机节距角调节系统,使桨叶绕其径轴转动,设置死区避免了电机连续接受调节命令而损坏。变桨距的速率决定于给定节距角和测量值之间的偏差,限幅±50°/s,桨距变化速率经积分得到桨距。在真实风力机的运行中β角不能突变,此模拟方法充分尊重了事实。
3 仿真实验与结果分析
3.1 正常状态分析
给风力机加额定风速,风力机转速提高,此时未加入负载转矩,空气动力矩的上升曲线表现了风力机的自由物理特性。当转速达到额定转速时,加入与空气动力矩相等的负载转矩,转速不再发生变化。此过程相当于在额定工作点实现了最大风能捕获。在1.5 s时刻,风速突然变为18 m/s,空气动力矩突变,风力机转速提高(由于控制系统能迅速响应,因此整个过程中其转速变动并不显著)β角迅速开启并最终稳定在某一特定值上,同时风力机转速回到额定转速,空气动力矩经过震荡最终与也负载力矩平衡。在2 s时刻,风速突变为16 m/s,此过程与前述过程相反,空气动力突降后随即上升;风机转速先降低后升高。由于β角迅速关闭并稳定,二者皆良好的追踪了其原设定值。仿真波形如图2。
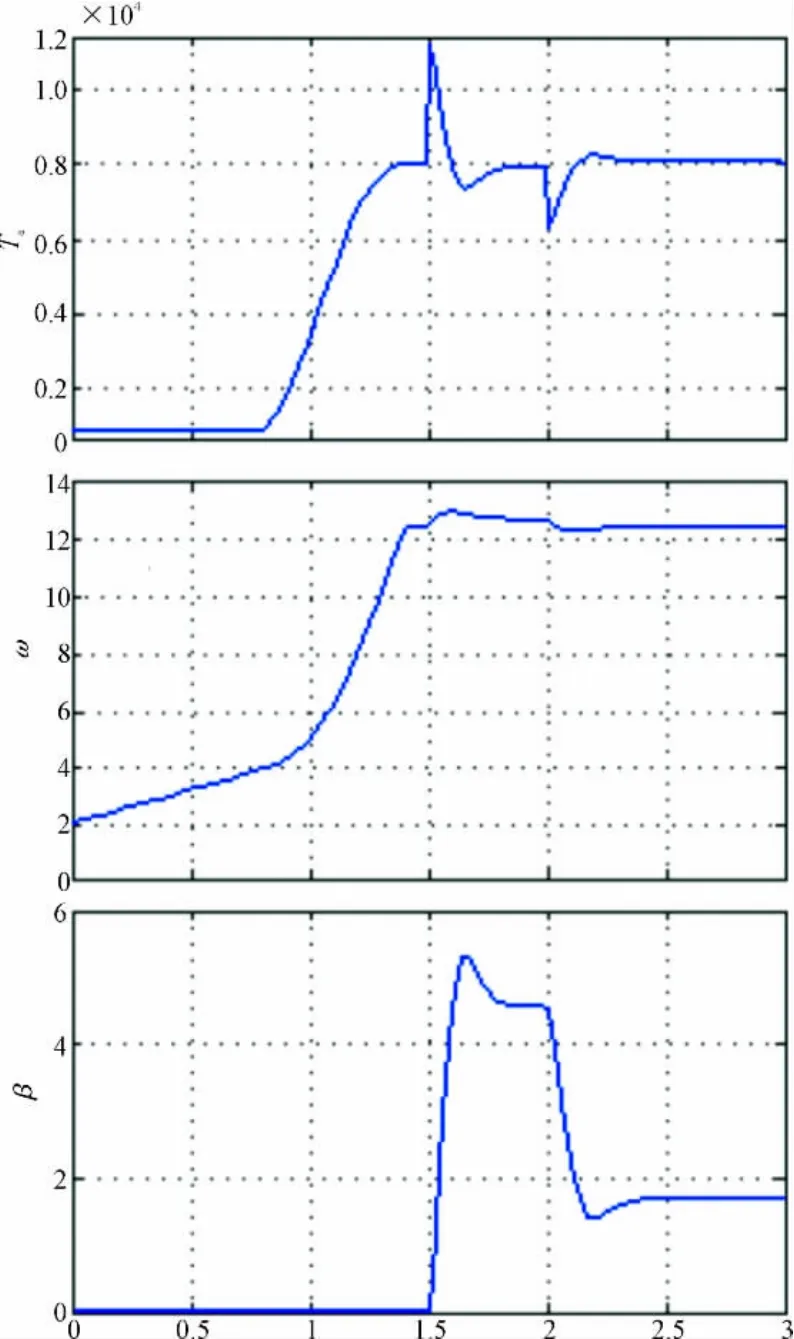
图2 正常状态下风力机空气动力矩、转速、桨叶节距角波形
上述仿真实验对应与实际风力发电机组正常运行状态下的最大风能捕获过程。当风速变化时,桨叶节距角可向正负两方向变动,维持风力机的空气动力矩与转速稳态恒定。本仿真验证了基于转速测量的风力机桨叶节距角控制的正确性。
3.2 故障状态分析
启动过程与3.1相同,当转速达到额定转速时,加入负载转矩,此负载转矩小于此时风机产生的空气动力矩,相当于发电机侧并未进行最大风能捕获控制,不妨设加入的负载力矩Te=6 000。风力机转速将继续提高,此时β迅速开启并稳定在特定值上,空气空力矩迅速减小,经过震荡最终与负载力矩平衡,风机转速也回到额定转速。在2秒时刻,负载转矩变为额定值,β角迅速关闭至0°,空气动力矩与风机转速皆良好的追踪了其原设定值。仿真波形如图3。
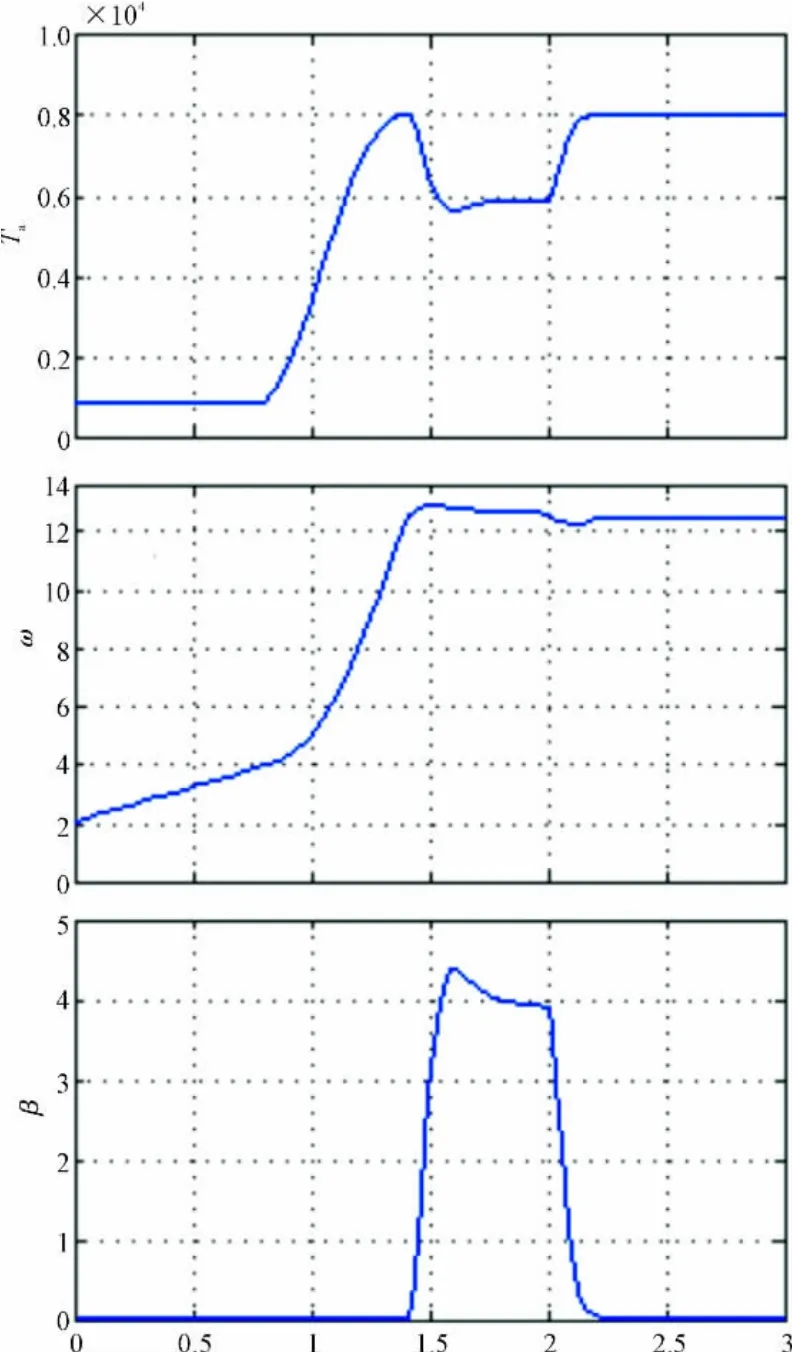
图3 故障状态下风力空气动力矩、转速、桨叶节距角波形
上述仿真实验对应于实际风力发电机组的故障运行过程。当风力机组端电压母线附近发生短路故障,风力机端电压降低使得发电机不能实现捕获最大风能捕获控制。此时风力的β角迅速开启避免了风力机转速失控造成的飞车事故,同时对系统电压稳定提供了支持。这使得风力机组获得了低电压穿越能力。本仿真实验一方面验证了风力机独立于发电机的运行与控制过程,另一方面验证了基于转速测量的风力机桨叶节距角控制的实用性与可靠性。
4 结论
1)本文构建了独立的风力机运行的仿真系统,并遵循了空气动力矩可以突变而桨叶节距角不可以突变的事实;
2)将额定风速以上的β控制转化为风力机额定转速以上的β控制,再现了风力机额定转速下的自由特性及额定转速以上的受控特性;
3)本文通过讨论风力机组的正常与故障运行状态验证了风力机的LVRT能力。证明了实验仿真方法的正确性与实用性。
[1] 白建华,辛颂旭,贾德香,等.中国风电开发消纳及输送相关重大问题研究[J].电网与清洁能源,2010,26(1):14-17.
[2] 汤凡,刘天琪,李兴源.用于风电场功率控制的飞轮储能系统仿真研究[J].电网与清洁能源,2010,26(2):63-68.
[3] 袁带英,刘勇彪.基于VC++的风力机主轴强度分析系统设计[J].电网与清洁能源,2010,26(1):65-67.
[4] 黄知龙,刘沛清,赵万里.某兆瓦级水平轴风力机叶片气动设计和性能评估[J].电网与清洁能源,2010,26(1):68-72.
[5] 喻新强.西北电力系统如何应对大规模风电开发与利用[J].电网与清洁能源,2009,25(8):1-6.
[6] 安天瑜,王震宇,金迩洙,等.电力系统风险研究现状[J].电网与清洁能源,2009,25(9):4-10.
[7] 屠强.风电功率预测技术的应用现状及运行建议[J].电网与清洁能源,2009,25(10):4-9.
[8] 宋伟伟,李强,袁越.双馈风电机组接入地区电网后的电压稳定分析[J].电网与清洁能源,2009,25(5):36-40.
[9] 王传杰,向彦彬.分频风电系统频率控制策略研究[J].电网与清洁能源,2009,25(3):43-47.
[10]沙非,马成廉,刘闯,等.变速恒频风力发电系统及其控制技术研究[J].电网与清洁能源,2009,25(1):44-47.
[11]黄栋,李怀霞,张振.风电产业全球态势与政府政策[J].电网与清洁能源,2009,25(2):46-49.
[12] 黄毅诚.大力发展风电[J].电网与清洁能源,2008,24(7):1-2.
[13]谢长军.大发展背景下的风电开发建设路径选择[J].电网与清洁能源,2008,24(12):1-3.
[14]施鹏飞.全球风力发电现状及发展趋势[J].电网与清洁能源,2008,24(7):3-5.
[15]Thomas Ackermann,Lennart Soder.Wind Energy Technology and Current Status:a Review.Renewable and Sustainable Energy Reviews[J].Renewable and Sustainable Energy Reviews,2000,(4):315-374.
[16]黄永安,李文成,高小科.Matlab7.0/simulink 6.0应用实例仿真与高效算法开发 [M].清华大学出版社,2008:287-311.
[17]叶杭冶.风力发电机组的控制技术[M].2版.机械工业出版社,2005:182-198.
[18]李建林,许洪华.风力发电中的电力电子技术[M].北京:机械工业出版社,2008:234-237.
[19]刘剑,李建林.一种简单易行的风力机模拟器[J].电气传动,2007,37(10):3-6.
[20]Ezzeldin SAbdin,Wilson Xu.Control Design and Dynamic Performance Analysis of a Wind Turbine-Induction Generator Unit.IEEE Trans.on EC[J].2000,3(15):91-96.