残疾人用Partial Finger机构研究
2010-03-24杨会生刘伊威
杨会生,姜 力,刘伊威,刘 宏
(哈尔滨工业大学机器人研究所,哈尔滨150001,yanghuisheng@126.com)
近年来,仿人型残疾人假手的研究已经成为生物医学工程及机器人学科的一个热点方向.随着机器人灵巧手技术的飞速发展,单自由度、三自由度、五自由度、多自由度残疾人假手相继出现.比较有代表性的有Otto Bock手、TBM手、HIT/ DLRⅢⅣ型假手、i-LIMB手、FluidHand手、惠普金斯大学假手[1-8].这些假手在外形、重量、自由度配置和感知功能方面都具有了某些方面的改进,但是上述假手的研究还主要集中在臂部骨骼离断的全手阶段,它们安装时要求上肢残疾人患者全手残疾,并且对小臂残肢长度有一定要求.针对手部骨骼残疾的研究较少,特别是掌骨和指骨离断的研究,因为其有效利用体积小,拟人化要求高,基本处于空白状态.据业内人士调查显示,手残患者中有相当一部分不是整手残疾,而是部分手残疾,所以针对部分手残疾的假手的研究日益迫切[9-10].
本文针对手指基指节(第一指骨)离断的残疾人患者,设计了一种结构简单,安装简便快捷,外观形象逼真,运动方式拟人化的残疾人用Partial Finger.有效地解决了现在没有适用于手指基指节残存患者能够使用的功能型假肢问题.
1 Partial Finger结构设计
1.1 手部残疾类型和手指基指节离断结构分析
普通人手是由5个手指构成,每个手指都有很多骨骼组成,手指各个关节的运动是通过与之直接相连的肌肉或筋腱的相应收缩、伸展运动实现的,图1为人手骨骼构造简图[11],掌骨与手腕骨相连,手腕骨通过腕关节与小臂相连.医学上针对手部残疾类型有腕关节离断、手腕骨截断、手掌骨截断、第一节指骨截断、第二节指骨截断、第三节指骨截断等类型,小臂和上臂及对应关节的离断也与手掌有关.研究证明,手指第二、三指骨截断基本不影响手指的正常功能,可以安装装饰型假肢,但是基指节(第一指节指骨)离断将严重影响手指的正常功能,需要安装功能性假肢来弥补手指功能.人手每个手指有3个关节,基关节有两个自由度(侧摆运动和张合运动),其余关节只有一个自由度(张合运动),因为手指基指节的驱动肌肉在手掌内,所以手指基指节离断后,残余基指节依然保留了原来的运动能力,如果利用得当,可以驱动假手指实现拟人化运动.
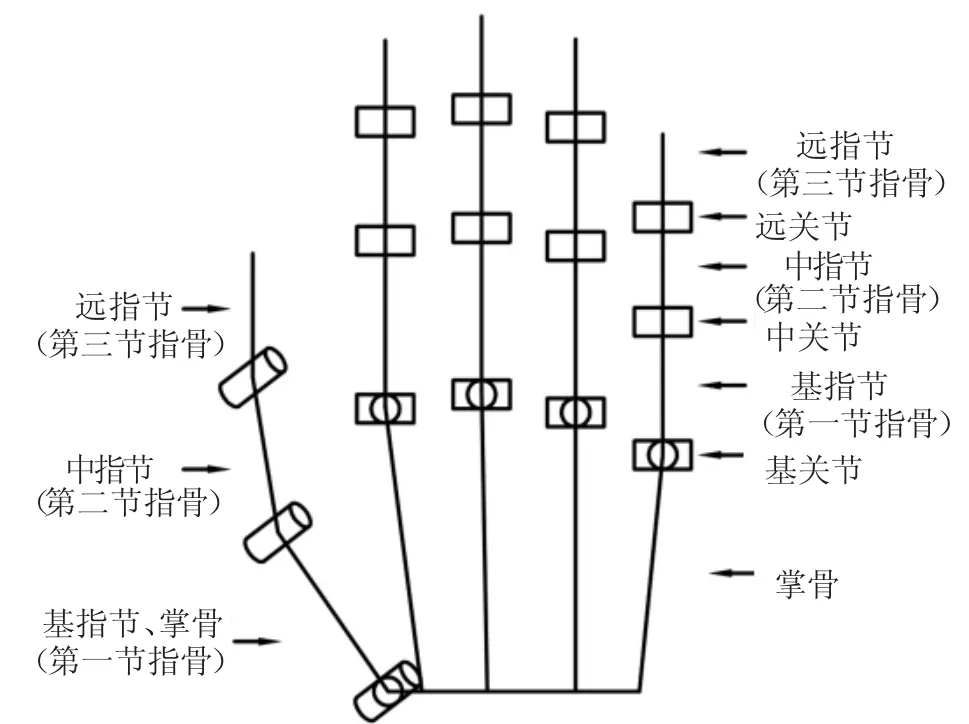
图1 人手骨骼构造简图
1.2 Partial Finger的整体结构
考虑到假手指应用普遍性,本文所研制的Partial Finger样机以人手指有效利用体积最小、实现难度最高的小指为基准,并预留外包装指套的空间.Partial Finger由假手指连接部分(手掌部分)、基指节、中指节、远指节4部分组成,其结构图见图2,各指节具体尺寸参数见表1.Partial Finger三指节采用全耦合结构,分别选取手指自然伸展和完全合拢为初始状态,设计假手指各指节的运动空间,为了模仿人手指的运动状态,采用近似定传动比来设计各指节四杆机构的尺寸参数,最终确定基关节与中关节近似9∶10传动,中关节与远关节近似4∶3传动.各指节运动范围见表2.基指节与中指节初始角度为5°,中指节与远指节初始角度为0°.
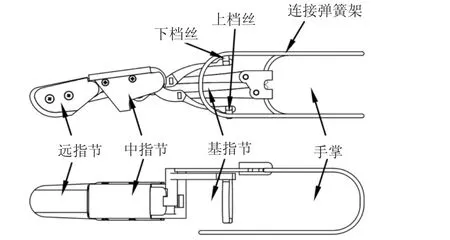
图2 Partial Finger结构图

表1 假手指外形尺寸 mm
假手指通过连接弹簧架的弹性将假手指连接到手掌上,连接弹簧架的圆弧与手指的虎口接触定位.连接弹簧架与基指节四杆机构的基座轴向固定、周向转动,模拟手指基关节的侧摆自由度,上下档丝分别与基指节四杆机构的上下连杆固连,通过对假手指参数进行优化,可使上下档丝在假手指开合运动整个过程中近似包络出残余基指节的形状,并且保证残余基指节在任意位置与上下档丝接触,从而驱动假手指开合.
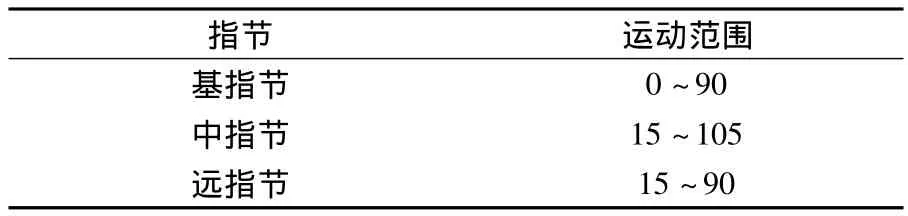
表2 假手指各关节运动范围 (°)
1.3 耦合四杆机构参数确定
假手指开合机构采用全耦合的原理设计,基指节四杆机构和中指节四杆机构原理基本相同,将基指节四杆机构中的两个杆与中指节四杆机构中的两个杆固连,可将基指节运动耦合到中指节,将远指节与中指节的一个杆固连,可将中指节运动耦合到远指节.
图3为近指节四杆机构,假手指合拢运动时l4为基座,l1为主动杆,l3为中间杆传动杆,l2为从动杆;假手指张开运动时l4为基座,l3为主动杆,l1为中间传动杆,l2为从动杆.在假手指开合运动过程中,同时l1与l2是与中指节四杆机构的耦合连杆,所以角β也是中指节四杆机构的驱动角.
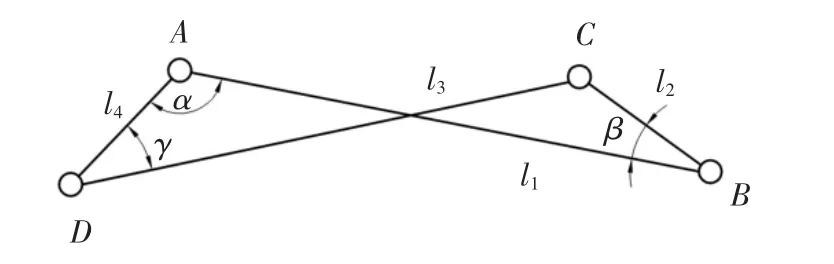
图3 近指节四杆机构简图
以手指合拢运动为例设计基指节四杆机构各杆参数,手指张开可视为合拢运动的逆运动.由上述分析可知,在手指的运动过程中,l4可视为手掌,l1可视为基指节,l2可视为中指节.所以角α(主动旋转角∠BAD)的增量Δα就是基关节的运动角度,同理,角β(耦合旋转角∠CBA)的增量Δβ就是中关节的运动角度.基指节与中指节的旋转方向一致,所以Δα为负,Δβ为正,为实现基指节与中指节近似定传动比运动,在运动过程中应有-Δα≈n×Δβ(n为基关节与中关节传动比).为保证基指节开合运动的对称性,在运动过程中∠BAD的变化量Δα与∠ADC的变化量Δγ近似相等,即有-Δα≈Δγ.
由人手指大小的要求及结构尺寸限制,可确定指节长度和某些杆的长度范围.在参数确定的过程中,首先可以确定的是l1和l4,为了得到最优化的各杆参数,本文根据实际情况取l2∈[l4-2,l4-2].此外,四连杆机构中需要确定的参数还有角α和角β的初始值α0和β0.考虑到传递效率和关节运动范围,有
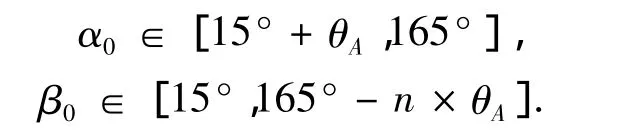
式中:θA是∠BAD的运动范围,n为基关节与中关节传动比,考虑到实际加工水平,l2的最小搜索步长为0.1 mm,α0和β0的最小搜索步长为0.5°,利用matlab进行三层嵌套循环,从而可计算得连杆l3的一系列长度值:

本文在设计连杆的过程中,以-Δα与n×Δβ角度差δ1及-Δα与Δγ的角度差δ2的和为主要参考指标.要求当主动角α从初始角度开始,在0~θA的运动范围内,δ1+δ2的统计值(均值E(δ1+δ2)、方差D(δ1+δ2))最小.

式中:n1为主动角α在运动区间内采样点的数目,δ=δ1+δ2,δk=δ1k+δ2k.
在传动过程中,可以得到α,β,α0,β0与δ的函数关系:

经过Matlab仿真计算,得出以下一组最优参数l1=33.5 mm,l2=5.5 mm,l3=32.3 mm,l4=6 mm,α0=117°,β0=26.5°.
中指节四杆机构如图4所示,l'1和l'4与基指节四杆机构耦合,l'2与远指节耦合.∠B'A'D'的变化量Δα'与Δα大小相同,方向相反.∠C'B'A'的变化量Δβ'是远关节的运动角,为保证中指节与远指节运动角度近似等比例,应有Δα'=-n'× Δβ'(n'为基指节与远指节的传动比).
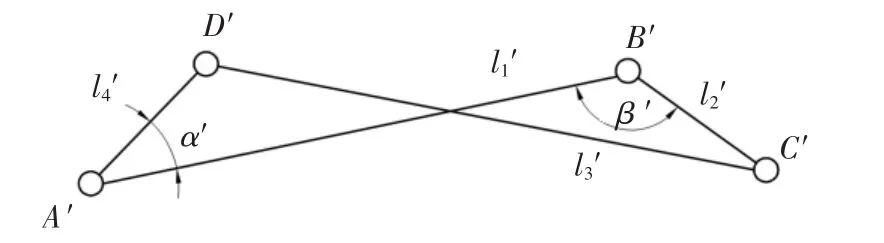
图4 中指节四杆机构简图
经过Matlab计算,得出以下一组最优参数: l'1=15 mm,l'2=5 mm,l'3=12.9 mm,l'4= 3.9 mm,α'0=17°,β'0=90.5°.
利用Matlab将上述参数带入,测得各关节运动角度误差如图5所示,结果表明基关节最大传动误差0.59°,中关节最大传动误差0.63°.

图5 关节运动误差
2 Partial Finger的运动学分析

图6 假手指合拢机构简图
因为假手指开合运动的运动互逆,假手指的运动学分析以合拢运动为例.在假手指合拢运动过程中,残余基指节与基指节四杆机构的下挡丝(详见图2)保持接触,可将接触面近似看作线接触,则残余基指节与下挡丝既存在转动又存在滑动,可以用一个滑动副加一个转动副代替,则假手指合拢运动的机构简图如图6所示.O点既是坐标原点,也是基指节的关节点,lAQ是残余基指节的下表面.利用杆组法将图6划分为Ⅰ级机构AQ、RRPⅡ级基本杆组AAB、Ⅰ级机构BC、RRRⅡ级基本杆组EDC、Ⅰ级机构DF、Ⅰ级机构DH、RRRⅡ级基本杆组FGH、Ⅰ级机构HP.设残余基指节与x轴夹角为φ1,角速度为ω1,角加速度α1,则各点各杆的所有运动参数全部可求,将关键杆和重要点的运动参数进行定量分析,对照图6关键杆有基指节杆l5、中指节杆l7、远指节杆l10,重要点有中关节点D、远关节点H、远指节指尖点P、下挡丝点A,还有A与Q的相对运动关系.
图7所示为假手指各关节点的运动轨迹,对比人手指的运动形式可知,假手指具有高度拟人化的运动状态.
图7 假手指各关键点运动轨迹
图8~10为假手指各指节的运动状态.由图中曲线可知,假手指各关节以近似定传动比运动,当残余基指节匀速运动时,假手指各指节角加速度很小,近似匀速运动.图11所示为假手指下挡丝在残余基指节上的运动状态,上图表明挡丝与残余基指节相对运动量较小,相对运动速度很小,所以挡丝对残余基指节的磨损量很小,可以利用残余基指节长时间驱动假手指.
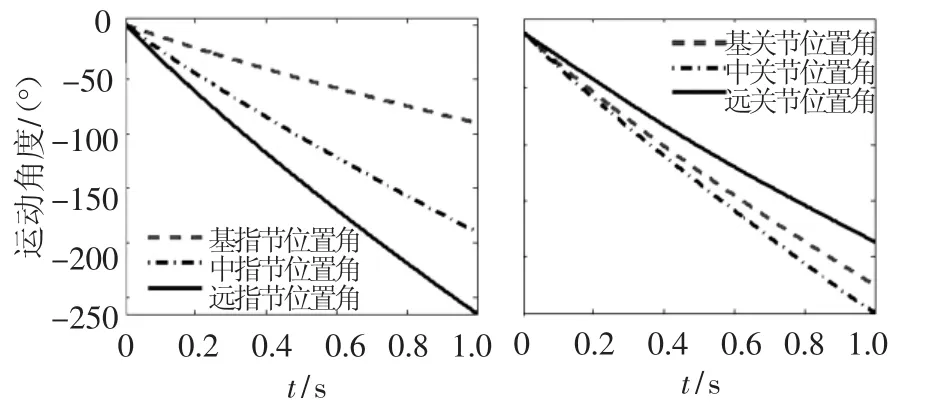
图8 假手指各指节运动角

图9 假手指各指节运动角速度

图10 假手指各指节运动角加速度

图11 假手指A相对Q运动关系
3 Partial Finger的运动实验
根据前文所述的结构,研制出了Partial Finger样机,根据相应残疾类型设计了残手实验装置,对假手指进行了性能实验.通过负载实验验证,假手指可通过单手拆卸,在只通过连接弹簧架连接时,假手指指尖可承受力为10.7 N,记录弹簧架状态,再现于人手掌上,没有压迫感;同时进行了5万次疲劳实验,在整个实验过程中,假手指连接可靠,机构运动平滑,实验完毕,残余基指节与上下档丝的磨损量不大;此外,本文还进行了抓取能力实验,因为没有其他手指的配合,Partial Finger只能对外形尺寸<25 mm的物体进行操作,但抓取稳定、力量可靠,如图12所示;最后通过对比假手指的运动状态,特别是假手指始末状态与人手自然状态(如图12所示),表明假手指运动方式和外形高度拟人化,配合外包装手套可以完全满足残疾人需要.
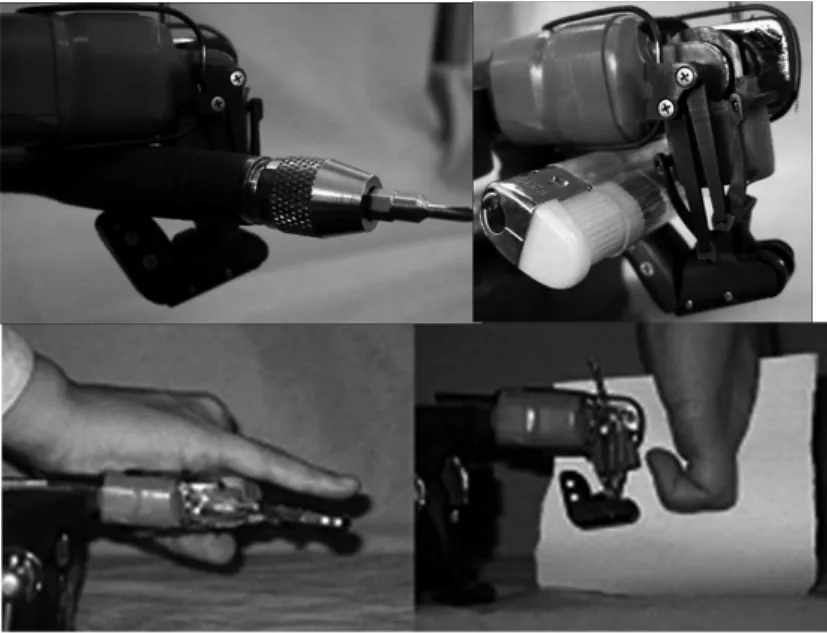
图12 Partial Finger实验图片
4 结语
1)研制了一种利用被动方式驱动,采用全耦合机构实现手指开合的仿人型残疾人用Partial Finger,并设计了相应连接机构.
2)分析了手指基指节离断的手部结构,利用Matlab设计了以近似等比例传动的杆件参数,对假手指的运动学进行了理论分析,研制了假手指实验平台,并对其整体性能进行了验证.
3)通过多次实验证明,该假手指结构简单、可靠,运动灵活、控制方便,可以配合其他手指完成手的近95%功能.
[1]CHAPPEL P H,KYBERD P J.Prehensile control of a hand prosthesis by a microcontroller[J].Journal of biomedical engineering,1991,13(5):363-369.
[2]CARROZZA M C,DARIO P.An Actuator System for a Novel Biomechatronic Prosthetic Hand[C]//In Proceedings of Actuator 2000.Bremen,Germany:[s.n.],2000:276-280.
[3]DECHEV N,CLEGHORN W L.Multiple finger,passive adaptive grasp prosthetic hand[J].Mechanism and Machine Theory,2001,36:1157-1173.
[4]ZHAO Dawei,JIN Minghe.Development of An Underactuated Prosthetic Hand with the Step Motor[J].High Technology Letters,2006,12(4):341-345.
[5]CHRISTINE C,Prosthetic hands from Touch Bionics[J].Industrial Robot,2008,4(35):290-293.
[6]SAITO Y,OGAWA A,NEGOTO,et al.Development of intelligent prosthetic hand adapted to age and body shape[C]//9th International Conference on Rehabilitation Robotics.[S.l.]:ICORR,2005:384-389.
[7]史士财,高晓辉,姜力,等.欠驱动自适应机器人手的研制[J].机器人,2004,26(6):496-502.
[8]ZHAO Jingdong,JIANG Li,SHI Shicai,et al.A Fivefingered Underactuated Prosthetic Hand System[C]// Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation.[S.l.]:ICMA,2006:1453-1458.
[9]陈 光.我国残疾人用品生产和供应概况及发展趋势[C]//2001年中国残疾人康复论坛专家论文集.北京:华夏出版社,2001:12-17.
[10]王新宪.中国残疾人康复事业的现状与展望[C]// 2001年中国残疾人康复论坛专家论文集.北京:华夏出版社,2001:1-6.
[11]BERGAMASCO M,SCATTARECGIA MARCHES S.The Mechanical Design of the MARCUS Prosthetic hand[C]//IEEE International Workshop on Robot and Human Communication.Tokyo:[s.n.],1995:95-100.