红外热像仪综合性能的客观评价及实现技术
2010-03-24寇小明刘上乾
寇小明,刘上乾,洪 鸣,卢 泉
(1.西安电子科技大学技术物理学院,西安710071,casscamm@126.com;2.中船重工第705研究所,西安710075)
光电成像系统其性能评价离不开人类视觉系统的参与,人类视觉系统不但包含着空间和时间的积分过程,还有大脑视觉中枢的认知过程.红外热像仪用于重建空间温度场分布,其性能主要取决于两个参数:1)空间分辨率;2)温度灵敏度,即图像信噪比.这两个指标综合反映了热像仪的目标探测与识别能力.红外热像仪的综合性能是指描述其整体性能和预测其外场性能的总体指标,该指标将红外目标源、传输信道、热像仪和观测者作为一个整体,构成一个红外成像观测系统,测量结果包括了热像仪的热灵敏度、空间分辨率和观测性能,因而可用于评价热像仪的总体性能,并对新技术的效果进行评估.
由于早期对感知过程建模存在问题和难以测量噪声谱,包括观测者在内的主观测量方法广泛应用在实验室中对红外成像观测系统进行性能评价,针对第1代和第2代扫描热像仪,美军红外与夜视实验室提出了MRTD(Minimum Resolvable Temperature Difference)综合指标,MRTD描述了红外成像观测系统在带有噪声的图像中分辨四杆靶的能力,是靶的空间频率的函数,同时又包括了观测者对噪声的空间与时间积分以及眼睛的分辨率,测量结果直接与视觉感知能力和目标探测识别能力相关,比较适合于诸如在噪声中进行目标识别等实际任务.MRTD测量过程是由经过训练的观测人员采用被测热像仪观测不同空间频率和温差的四杆靶,记录刚好能够分辨四杆靶时的温差和空间频率,四杆靶及典型测量曲线如图1所示[1],横坐标是目标大小(S/c·mr-1),纵坐标是最小分辨温差(ΔT/K).
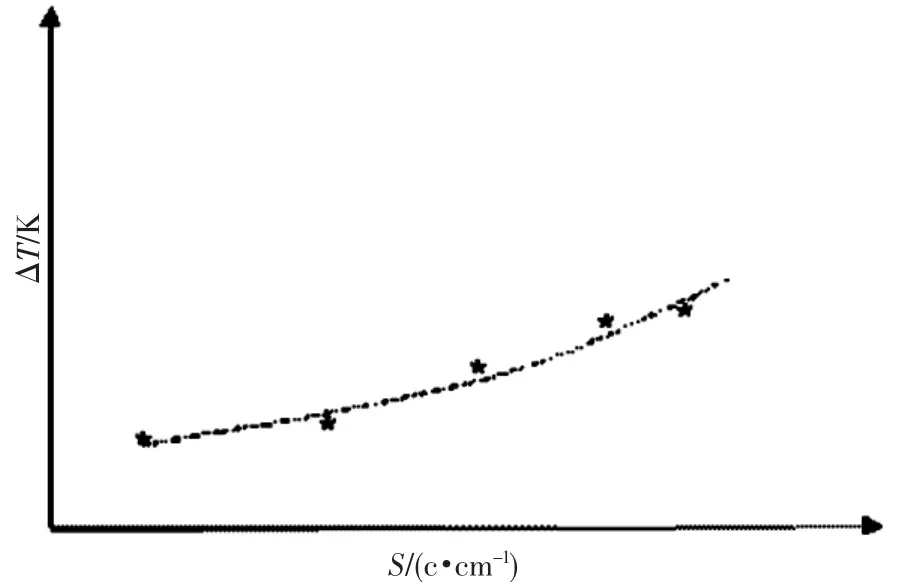
图1 典型的MRTD曲线
MRTD既是一个全面反映红外成像观测系统综合性能和成像质量的指标,同时也是一个最受争议的指标,主要不足为:1)在预测热像仪的目标探测识别任务的能力时,对于早期的扫描热像仪预测结果和试验数据比较吻合,但凝视阵列热像仪出现后,两者的偏离非常大;2)MRTD测量是在适当优化的条件下进行的,测量过程非常耗时且有较大的主观性,观测人员的决策判断是无法验证的,在不同的人之间或同一个人在不同的时间之间判断准则都有可能是漂移的,学习训练的程度、注意力是否集中、以及心理变化等都会影响决策的结果,一般MRTD指标的测量离散度大约在±20%范围内[2].
凝视阵列热像仪由于欠采样的存在,仍然沿用MRTD指标有明显的缺陷,表现为:1)高频模式靶的观测结果很大程度上依赖于它和传感器像素阵列的相位,即相对位置[3];2)MRTD测量限定在奈奎斯特频率以内进行,但无法确定有意义的MRTD空间频率范围;3)采用非均匀性校正技术时热像仪的性能指标是时变的,特别是对于动态场景图像,事先并能确知奈奎斯特频率[4-5].
为此,学界提出了多种MRTD改进指标:1) MTDP(Minimum TemperatureDifferencePerceived)指标[6],它是在优化的相位上观测模式靶,不要求要看到全部四个靶,在奈奎斯特频率以外能够分辨两个靶杆时就作为该频点的对比度阈值,从而将测量范围扩展到奈奎斯特频率之上,这种改进使得距离预测性能和实际测量结果较为接近,但由于受到相位优化的限制,仍然不适合于动态场景应用.2)DMRT(Dynamic MRT)指标[7],它是将模式靶以一个优化的速率相对于传感器的采样栅格移动(大约是每帧1/4像素),观察员可以在变化的位置上进行积分从而在奈奎斯特频率之上感知到四杆靶.它可适用动态场景,但移动速度和帧频是相关的,而采用超级采样等信号处理技术时事先不可能确定优化的速度,热像仪和模式靶的相对运动还会带来图像模糊,对观测员来说同时对模式靶进行调制和移动也是难以实现的.
由于最佳感知相位的存在和采用四杆靶的调制作为空间频率,MRTD及其改进指标测量过程仍离不开人的主观参与,导致测量结果的离散度较大.目前,红外热像仪的应用已从远距离静态探测发展到近距离的动态使用,凝视阵列热像仪采用了微扫描[8]、超级采样、动态非均匀性校正等多种技术措施提高欠采样阵列的性能.以MRTD为代表的静态综合性能指标已不能适应新技术和新应用的发展需要,为了定量分析新技术对红外成像观测系统观测性能的效果,应研究更为客观有效的红外热像仪综合性能指标及其测量技术.
1 TOD评价方法的深入分析
三角方向鉴别阈值法方法(Triangle Orientation Discrimination threshold,TOD)由 P.Bijl和J.M.Valeton提出,其目的是减小MRTD指标中由主观视觉判别的不确定性引入的差异.TOD方法是由观测人员采用被测热像仪观测一系列大小和温差不同的等边三角形靶标,判断三角形的顶点指向是向上、向下、向左还是向右[9-11].
观测人员判断正确的比率是三角靶标大小和对比度的函数,随靶标尺寸的增大和对比度的增强而单调增加,将这样的心理学感知过程用Weibull函数来描述,曲线如图2所示.由于采用的是4选1的模式,判断正确的比率范围为25%~100%.
图2 Weibull曲线拟合示意图

式中:x为激励强度(大小或温差),a为激励强度阈值,β为曲线陡峭程度适配参数(取值范围为3~8),γ为猜测比率(4选1的猜测比率为0.25),δ为人为出错的概率(一般取0.02).这个函数表达了依赖于激励强度的从低概率到高概率的连续响应,在激励强度为75%的正确水平时为

TOD基于一种统计过程,保持一个参数固定下改变另一个参数,对判定结果统计后按Weibull函数做曲线拟合,取曲线上概率为75%的点作为阈值点,即观察员取得75%正确判定概率时的阈值,测量时对比度一般按15%递增,靶标面积按25%递增,4个方向均匀分布.在测量TOD时,样本展现过程激励一般从大到小,激励点的间隔取决于心理学函数的斜率,a75/a的范围一般在1.06~1.18,每次观测中样本相对于焦平面都有一个微小的位移.
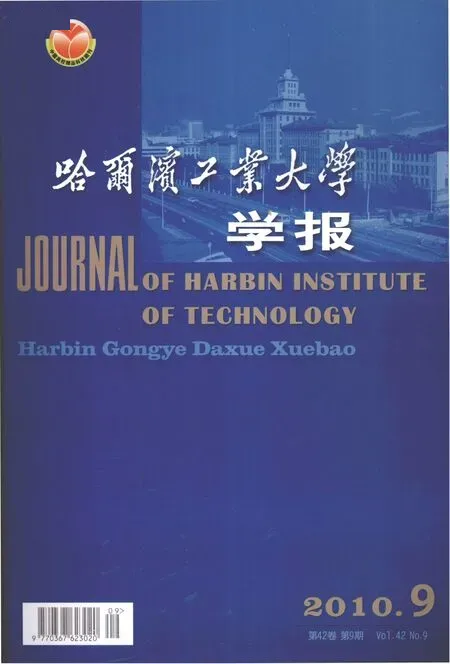
TOD阈值曲线定义为在判定正确率为75%水平上的对比度或大小的拟合曲线,对比度用对数尺度,大小用三角形面积开平方的倒数表示,典型的TOD阈值曲线如图3所示.
TOD评价方法提出的初衷是通过采用4选1的感知实验降低主观因素的影响,但三角形靶标的傅立叶变换无论在笛卡尔坐标系还是在极坐标系中都是不可分离的,难以用信号传输理论进行分析.
图3 典型的TOD曲线
随着热像仪技术的不断进步和应用范围的不断扩展,TOD评价方法的用途不断扩大,主要体现为:
1)客观性和重复性好,通过采用非周期的模式靶消除了相位影响,测量结果和观测者的内部决策准则无关,观测者的感知可信度可通过统计验证,测量结果的离散度大为缩小;
2)测量过程没有四杆靶那样的空间频率限制关系,更加接近实际使用情况,可用于预测热像仪的外场观测性能,受探测器类型的影响较小,通用性好;
3)评价方法适用于动态场景,可用于动态场景应用场合下预测热像仪的性能;
4)可适用于预测微扫描、超分辨重建、动态非均匀性校正等新技术的应用效果.
图4比较了MRTD和TOD评价方法的测量结果因人而异的统计离散度,所采用的设备包括差分黑体、平行光管、四杆靶标、三角靶标、中波热像仪、长波热像仪等.在高频处MRTD评价方法的离散度在均值的40%范围内,而此时TOD评价方法的离散度只有8%,因此TOD方法在不同的观测人员之间具有很好的一致性.
类似于 STANAG4349中詹森准则[12]用MRTD指标预测热像仪的目标探测能力,在得到TOD参数后,也可采用TOD准则预测外场探测性能.覆盖目标临界尺寸的等效三角形靶标的周期数为

式中:S为目标在视场角内的面积,R为目标与探测器之间的距离,S'为目标在系统入瞳处的表观温差与TOD曲线的交点对应的空间频率.M75为对应75%的正确判别概率时,目标角平方根面积与三角形靶标角平方根面积的比率,不同目标获取任务所对应的M75值是不同的.
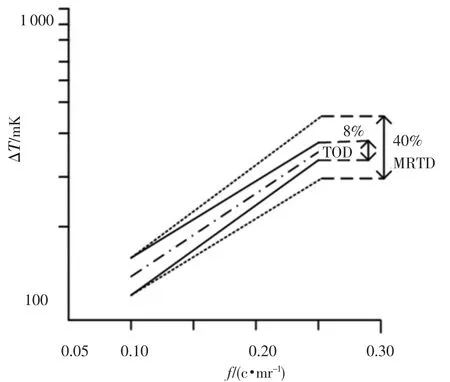
图4 主观因素引起的离散度比较
近年来,凝视阵列热像仪不断采用内部NUC校正(Non-Uniformity Correction)、基于场景的NUC校正、超级扫描等技术提高性能,此时其综合性能是时变的,MRTD评价方法对此已无能为力,只有TOD方法可以预测动态性能.
2 TOD检测的客观实现
分析表明,采用TOD方法评价红外热像仪的图像质量和综合性能具有较小的离散度,而且靶标形状比较规则,使得可以采用机器视觉技术进行客观评判,不但可以进一步降低综合性能参数的离散度,还可以提高判读的速度,从而得到当前的动态综合性能.
鉴于图象质量评价离不开人的主观视觉感受,因此在客观评价方法中将人类视觉系统的能力和限度模型化,人类眼睛的点扩展函数PSF (Point Spread Function)来自于3个物理效应环节的综合:光学、视网膜和视神经震颤,人类眼睛的传递函数为

眼睛的光学传递函数为

眼睛的光学传递函数是显示亮度的函数,因为眼睛瞳孔直径随着光亮度水平而自适应改变,io和fo是两个依赖于瞳孔直径的参数.
视网膜的传递函数为

眼睛视神经震颤的传递函数为

对得到的图像按照视觉模型模糊化处理后用机器视觉识别技术进行TOD检测,这里采用了模式匹配的方法,模式匹配有模板灰度匹配和模板几何匹配两种,它们分别用灰度信息和几何信息作为主要特征.TOD检测方法使用的目标靶为等边三角形,检测过程目标的大小和温差是变化的,但具有确定的几何形状,因此采用了模板几何匹配方法.
模板几何匹配过程包括了学习和匹配两个阶段.学习过程从模板中提取几何特征并得到这些特征的空间关系,包括了曲线提取、特征提取和特征之间的空间关系表达3个操作步骤.曲线提取过程提取模板图像的边缘轮廓点,细分为3个步骤:寻找曲线种子点、跟踪曲线和细化曲线;特征提取过程从曲线中提取高级几何特征,并按照曲线的类型、力度和显著性排序,得到特征排序后,用特征之间的空间关系建立模板特征模型以描述模板.匹配过程用模板特征模型在图像中寻找匹配对象,主要包括5个操作步骤:曲线提取、特征提取、特征匹配、模板模型匹配和匹配细化,前两个步骤和学习过程一样.特征匹配建立初始的潜在匹配并用进一步的信息或参数(位置、角度、长度)进行细化;模板模型匹配是将模板模型叠加在潜在匹配上,找到进一步的目标特征及其空间关系以确认潜在匹配,并产生进一步的信息用于更新和提高匹配精度;匹配细化提高匹配的位置、尺度和角度精度,利用从模板和检测图像中提取的曲线确保匹配的准确度和精度.
模板几何匹配完成后返回一个判读结果,包括数量、位置、大小、朝向、准确度.大小给出尺寸变化的百分比,准确度的范围为0~1000,内含了下列因素:
1)模板图像几何特征匹配目标对象的数量.
2)各特征匹配的单独分值.
3)边缘曲线的匹配力度.
这里边缘阈值和准确度是两个非常关键的指标,通过调整边缘阈值和准确度指标的接受范围可以使客观检测方法和主观判断方法的评价结果保持统计意义上的一致性.
为了验证TOD客观方法的有效性,采用仿真方法生成了TOD热靶图像,并在视觉系统模型之前对图像添加了高斯噪声,将图像和模糊函数卷积然后进行抽样采样,抽样过程图像不断缩小近似于三角形尺寸的变化,模糊函数为

式中:b为以像素表示的模糊函数宽度大小,用式(8)在图像的x和y方向分别进行卷积可以模拟图像的模糊过程及程度.图5是采用模板几何匹配方法识别加噪和模糊化后的仿真图像的结果,图像对比度减小到阈值附近时无法给出正确判别.

图5 模板几何匹配方法识别结果
通过建立热像仪综合性能检测的客观评价方法,机器判读时间比人工判读时间大为减少,处理判读时间在5 s以内,通过细化和调整参数,判读结果的一致性,即在围绕均值分布的离散度,也得到了进一步提高,比人工判读方法提高约1倍,将离散度缩小到了约4%.
3 结论
1)采用TOD检测方法可将热像仪综合性能指标的测量不确定度由±20%改善到8%,采用几何模板匹配过程实现机器判读时可进一步减小约1/2.
2)通过在成像观测环节用人类视觉传递函数及心理认知模型取代人类视觉观测过程,用模糊函数抽取模拟热像仪信道模糊过程,用几何模板匹配取代视觉认知过程,可实现TOD指标检测过程的客观化.
3)TOD检测方法满足统计意义上的客观性,而且适用于动态场景图像,因而将逐步取代MRTD成为红外成像观测系统的综合性能评价指标,并成为预测红外热像仪外场观测性能的图像质量准则.
[1]KOSTRZEWA J,LONG J,GRAFF J H,et al.TOD versus MRT when evaluating thermal imagers that exhibit dynamic performance[J].Proc.of SPIE,2003,5076:220-232.
[2]IRWIN A,GAULITNEY P,WHITE S.Discussion of IR Testing Using IRWindowsTM2001[M].Santa Barbara: Santa Barbara Infrared,Inc FLIR Systems,Inc,2002.
[3]BIJL P,SCHUTTE K,HOGERVORST M A.Applicability of TOD,MTDP,MRT and DMRT for dynamic image enhancement techniques[C]//Infrared Imaging Systems: Design,Analysis,Modeling,and Testing XVII.Washington,CA:Proc.of SPIE,2006,6207:1-12.
[4]李庆,刘上乾,赖睿,等.一种基于场景的红外焦平面阵列非均匀性校正算法[J].光子学报,2006,35(5): 720-723.
[5]姜光,刘上乾.红外焦平面阵列非均匀性自适应校正算法研究[J].红外与毫米波学报,2001,2(2): 93-96.
[6]WITTENSTEIN W.Minimum temperature difference perceived—a new approach to assess undersampled thermal imagers[J].Optical Engineering,1999,38(5): 773-781.
[7]WEBB C,HALFORD C.Dynamic minimum resolvable temperature testing for staring array imagers[J].Optical Engineering,1999,38(5):845-851.
[8]吴新社,蔡毅.红外凝视成像系统中的光学微扫描技术[J].红外与毫米波学报,2007,26(1):11-14.
[9]BIJL P,VALETON J M.Triangle orientation discrimination:The alternative to minimum resolvable temperature and minimum resolvable contrast[J].Optical Engineering,1998,37(7):1976-1983.
[10]MCHUGH S W,IRWIN A,VALETON J M,et al.TOD test method for characterizing electro-optical system performance[J].Proc.of SPIE,2001,4372:39-45.
[11]HOGERVORST M A,BIJL P,VALETON J M.Capturing the sampling effects:A TOD sensor performance model[J].Proc.of SPIE,2001,4372:62-73.
[12]RATCHES J A.Night vision modeling:historical perspective[J].Proc.of SPIE,1999,3701:2-12.