Reliability Analysis of Electromechanical Systems with Degraded Components Containing Multiple Performance Parameters
2010-03-01LIChunyangCHENXunandYIXiaoshan
LI Chunyang, CHEN Xun, and YI Xiaoshan
College of Mechatronics and Automation, National University of Defense Technology, Changsha 410073, China
1 Introduction
In electromechanical systems, the performances of components usually degrade over time, which results in performance degradation of the systems. Moreover, the performances of components usually contain multiple performance parameters in these systems, and each parameter of the performances has a degradation process.That is, the systems may have multiple degradation measures. If one degradation measure exceeds a certain threshold value, the component will fail, and then the system will degrade or fail. Because most of these systems have extremely high reliability, the reliability analysis of these systems is a problem when such new electromechanical systems are designed.
In previous research, this problem was solved by the performance degradation analysis theory and the traditional reliability theory. Performance degradation analysis is a very useful method to predict reliability of components or subsystems according to degradation data. After the reliability of components is estimated by the performance degradation analysis theory, the system reliability can be obtained by the traditional reliability theory. The procedure of the traditional method is shown in Fig. 1.
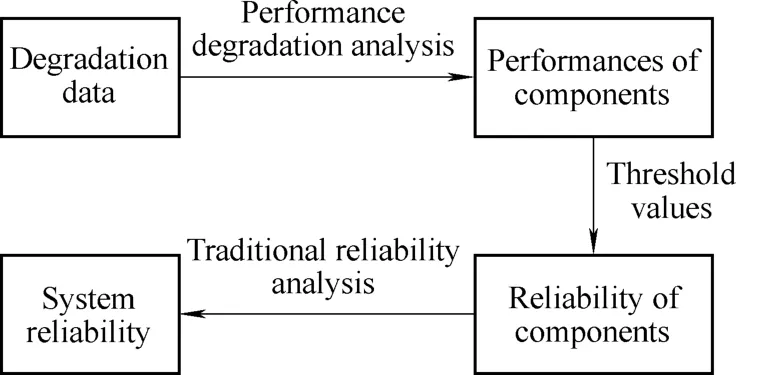
Fig. 1. Procedure of the traditional method
Many papers on performance degradation analyze the reliability of degraded components[1–7]. In these papers,there is only one single degradation measure. WANG and COIT[8]described a general modeling and analysis approach for reliability prediction based on degradation modeling, considering multiple degradation measures. XU and ZHAO[9]presented a method to analyze performance degradation involving multiple degradation measures.
In Refs. [8] and [9], the reliability of components estimated by the performance degradation analysis reflects the performances of components, but the relationship between the performance of the system and the performances of components is not analyzed. When the system reliability is estimated by the traditional reliability theory, the performance of the system can not be obtained and the relationship between reliability and performance can not be reflected. The main problem of the traditional method is that the systems are considered as binary systems,which only have two states: failed or working. Therefore the traditional method can not relate the system reliability analysis to the physics of failure mechanism. Actually,many electromechanical systems are multi-state systems.Compared with binary systems, multi-state systems can perform their task with many different performance levels except failed and working[10–11]. The multi-state system theory can analyze the relationship between the performance of the system and the performances of components. So the multi-state system theory is more suitable than the traditional reliability theory to analyze the reliability of these electromechanical systems.
The research on multi-state systems began in the 1970s[12–13], and gained a lot of researchers’ attention. There are mainly four different approaches to estimate the reliability of multi-state systems, and the universal generating function (UGF) method is used most widely[10–11]. The system states and corresponding state probabilities can be computed from component states and corresponding state probabilities by the UGF method.LEVITIN, et al[10–11,14]analyzed the reliability of multi-state systems using the UGF method. TABOADA, et al[15], LEVITIN, et al[16], OUZINEB, et al[17], and LI, et al[18], optimized the structures of multi-state systems based on the UGF method. In these papers, the performance of a component is measured just by a single variable for the performance of the component contains only one parameter.Because the performances of components usually have multiple performance parameters in electromechanical systems, a vector is used to describe the performance of the component instead of a single variable. In this situation, the UGF method should be extended and the operators of the UGF need be improved to analyze the system reliability.
In this paper, the states and corresponding state probabilities of degraded components are defined by the data of multiple performance degraded processes. The UGF method is introduced and extended to analyze the reliability of the multi-state system according to the states and corresponding state probabilities of components. The procedure of the proposed method in this paper is shown in Fig. 2.
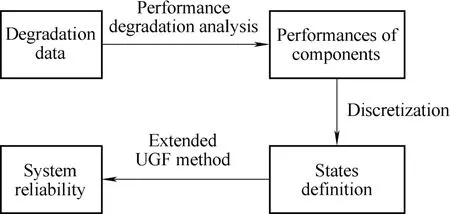
Fig. 2. Procedure of the proposed method in this paper
The remainder of the paper is organized as follows. The performance of a degraded component is analyzed in section 2. States and corresponding state probabilities of the degraded component are defined in section 3. The UGF method is introduced and extended in section 4. The system reliability is estimated in section 5. A numerical example is illustrated to demonstrate the proposed method in section 6.Finally, conclusions are given in section 7.
2 Performance of a Degraded Component
Suppose that the performance of a degraded component contains m parameters, and each parameter has a degradation process. The degradation processes are not reversible, and their paths are strictly decreasing. If these processes are independent, the probability density functionis used to describe each degradation process,whereix is parameter i of the performance, i=1,2, …,m . If these processes are dependent, the joint probability density functionis used to describe the degradation processes[8].
Assume that performance degradation of the component is measured on n test units. For the j th unit, the measurements at times t1, t2, …, trare, respectively, j = 1, 2, …,n.According to these degradation data, the probability density function at times1t, t2, …, trwhich are expressed ascan be obtained, when the degradation processes are independent.And the joint probability density function at times1t, t2,…, trwhich are expressed as…,can be obtained, when the degradation processes are dependent. Then the probability density functionand the joint probability density functioncan be obtained[5–8]. Because many papers had been published to analyze the performance of the degraded component, the details on how to get the probability density functionand the joint probability density functionare not discussed here.
When the performance of the degraded component is obtained, the traditional method will get the reliability of the component based on the threshold value, and then the system reliability can be estimated directly by the traditional reliability theory as depicted in Fig.1. But the proposed method in this paper will define states and the corresponding probabilities of the component, and then the multi-state system theory is applied to define the performance of the system and analyze the system reliability as depicted in Fig. 2.
The performance of the degraded component is defined as a m-dimensional random vector

According to the performance degradation analysis theory,the probability density function

can be obtained to describe the degradation processes whenare independent, and the joint probability density functioncan be obtained to describe the degradation processes whenare dependent.
3 States Definition and Corresponding Probabilities of the Degraded Component
Without loss of generality, suppose that there are two vectorsandif Yi≥ Zifor all i, then Y ≥Z is defined; if Yi≥ Zifor all i and Yi> Zifor at least one i, then Y >Z is defined.
After the probability density function or the joint probability density function of G (t) is obtained, the range of the performance can be defined as
where

For the purpose of obtaining the states and corresponding probabilities of the system, the states and corresponding probabilities of components must be defined first.
If we divide the range of each parameter into Mi(t)intervals:
then the M (t) states of the components can be defined as follows:

The probability density function of G(t) can be represented by sets g (t) and q (t).
The set g (t) which is the state performance levels of the component consists of the possible vectors of the component performance and takes the form

The set q (t ) is the corresponding state probabilities and takes the form

where

When the degradation processes are independent, ql(t)
where G l (t )[i ] is the i th element of Gl(t ).can be expressed as
When the degradation processes are dependent, ql(t)
4 Extension of the UGF Method
In this paper, a vector is used instead of a single variable in the UGF. Therefore, the UGF method is extended and the operators of the UGF are improved to analyze the system reliability.
When the state performance levels g (t ) and the corresponding state probabilities q (t) of the component are obtained, the UGF of the component can be defined as[10–11]

Similarly, the UGF of other components can also be obtained. Then the UGF of the system is to be computed based on the structure of the system.
In the operation of UGF, like terms can be collected,commutative law and associative law are applicable[19]:
Consider the performance of another component contains m′ parameters, and the UGF takes the form
For the purpose of obtaining the UGF of the system, an operator of the UGF is defined as
The g l (t) and hk(t) can have different dimensions,that is, m ′≠m . To simplify the procedure of the method,we define thatand hk(t ) have the same dimensions (m ′=m ) in this paper, and
For the purpose of obtaining f ( gl( t ) , hk(t )), operators ofare defined as follows.
When parameter i of the system performance is equal to the sum of that of components, define the π operator:

When parameter i of the system performance is equal to the maximum of that of components, define the1σ operator:

When parameter i of the system performance is equal to the minimum of that of components, define the2σ operator:

Of course, other operators can also be defined according to the situations.
So the UGF of the system can be obtained using simple algebraic operations over individual UGF of components:
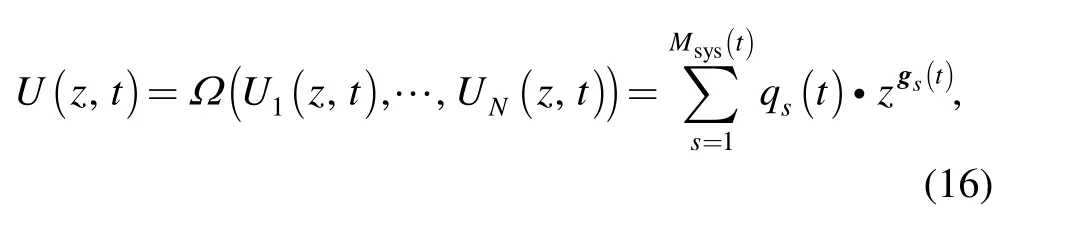
where U ( z ,t) is the UGF of the system, N is the number of components,is the number of possible states of the system,is the possible state performance level of the system,is the corresponding state probability.
Then the probability density function of the system performance is represented by gs(t ) and qs(t ), where s = 1, 2, …,Msys(t ).
5 System Reliability Estimation
Define the following δ operator over U ( z ,t):
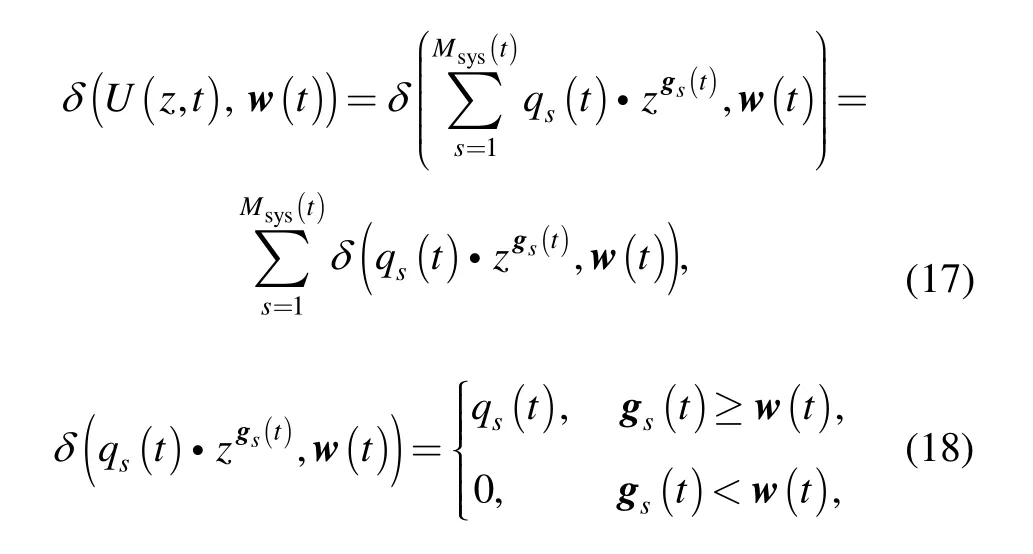
where w (t) is the required performance level of the system.
Then the reliability of the system estimated by the UGF method is
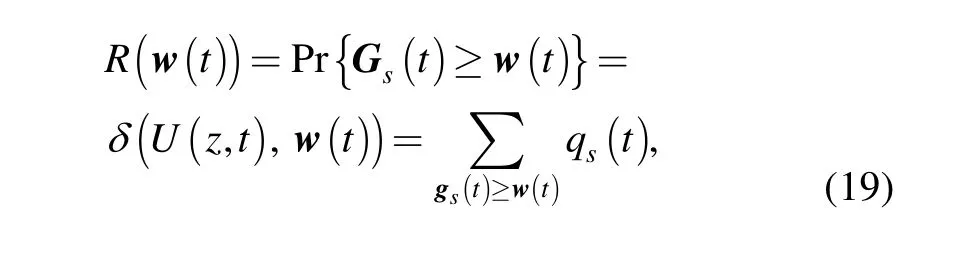
where Gs(t) is the performance of the system.
6 Example
The example in this section aims to illustrate the method discussed in previous sections.
Suppose a system is composed of two identical components connected in parallel. The performance of the component contains two parameters and each parameter of the performance is subjected to a degradation process. To verify the proposed method, assume the two degradation processes are independent, and the probability density functionandfollows the normal distribution. The first degradation process can be described by the mean μ1(t) and the standard deviation σ1(t ), where

The second degradation process can be described by the mean μ2(t ) and the standard deviation σ2(t ), where

The performance of the system is equal to the sum of that of the two components. The required performance level of the system is w (t) = (1 0 . 00, 90.00).
When t= 10 000 h , we can get

Then the probability density function of the first parameter of the system performance is
and the second is
According to the required performance level of the system w = (1 0. 00, 90.00), the system reliability is R= 0.9 69 3.This is the exact value of the system reliability.
The system reliability can also be obtained according to
the proposed method in this paper. Ifthe component hasstates, and the system reliability is0; ifthe system reliability is; ifthe system reliability is
Obviously, increasing the number of states can improve the computational accuracy, but the computation will be difficult.
If the traditional method is used to analyze the system reliability, the reliability of the component need be obtained first. The reliability of the component is defined as that the performance of the component is no less than( 5.0 0, 45.00 ), so the reliability of the component is 0.906 8 and the system reliability estimated by the traditional method is Rt= 0.8 22 3. Compared with the proposed method, the result obtained by the traditional method is conservative.
The system reliability obtained by the proposed method is compared with the exact values as depicted in Fig. 3. The results show that the reliability obtained by the proposed method is almost the same with the exact values.
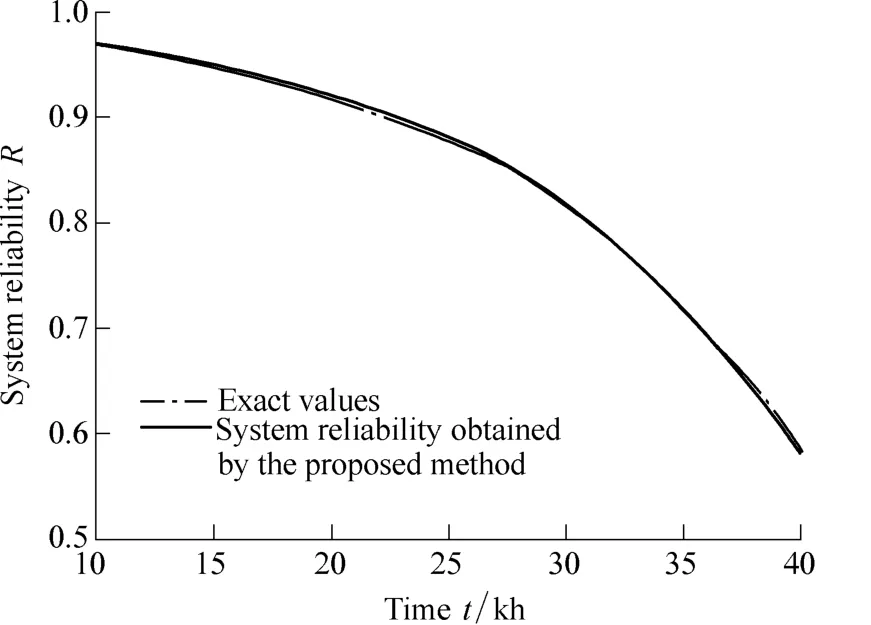
Fig. 3. System reliability obtained by the proposed method compared with the exact values
7 Conclusions
(1) A new method to analyze the reliability of electromechanical systems with degraded components containing multiple performance parameters is proposed.Combining the performance degradation analysis theory and the multi-state system theory, the proposed method can analyze the relationship between the performances of components and the performance of the system, and the results obtained by this method can reflect the real-life situation.
(2) The results of the example show that the system reliability obtained by the proposed method is almost the same with the exact values, and increasing the number of states can improve the computational accuracy.
(3) The UGF method can be applied to analyze the reliability of multi-state systems with multiple performance parameters when a vector is used instead of a single variable in the UGF.
[1] LU J C, MEEKER W Q. Using degradation measures to estimate a time-to-failure distribution[J]. Technometrics, 1993, 35(2): 161–174.
[2] MEEKER W Q, ESCOBAR L A, LU C J. Accelerated degradation tests: modeling and analysis[J]. Technometrics, 1998, 40(2): 89–99.
[3] CHIAO C H, HAMADA M. Using degradation data from an experiment to achieve robust reliability for light emitting diodes[J].Quality and Reliability Engineering International, 1996, 12(2):89–94.
[4] CRK V. Reliability assessment from degradation data[C]//Proceedings Annual Reliability and Maintainability Symposium,Los Angeles, CA, USA, January 24–27, 2000: 155–161.
[5] COIT D W, EVANS J L, VOGT N T, et al. A method for correlating field life degradation with reliability prediction for electronic modules[J]. Quality and Reliability Engineering International, 2005,21(7): 715–726.
[6] JAYARAM J S R, GIRISH T. Reliability prediction through degradation data modeling using a quasi-likelihood approach[C]//Proceedings Annual Reliability and Maintainability Symposium,Alexandria, VA, USA, January 24–27, 2005: 193–199.
[7] HUANG Wei, DIETRICH D L. An alternative degradation reliability modeling approach using maximum likelihood estimation[J]. IEEE Transactions on Reliability, 2005, 54(2):310–317.
[8] WANG Peng, COIT D W. Reliability prediction based on degradation modeling for systems with multiple degradation measures[C]//Proceedings Annual Reliability and Maintainability Symposium, Los Angeles, CA, USA, January 26–29, 2004:302–307.
[9] XU Di, ZHAO WenBiao. Reliability prediction using multivariate degradation data[C]//Proceedings Annual Reliability and Maintainability Symposium, Alexandria, VA, USA, January 24–27,2005: 337–341.
[10] LEVITIN G. The universal generating function in reliability analysis and optimization[M]. London: Springer, 2005.
[11] LISNIANSKI A, LEVITIN G. Multi-state system reliability:Assessment, optimization and applications[M]. Singapore: World Scientific, 2003.
[12] EL-NEVEIHI E, PROSCHAN F, SETHARAMAN J. Multi-state coherent systems[J]. Journal of Applied Probability, 1978, 15:675–688.
[13] BARLOW R E, WU A S. Coherent systems with multi-state components[J]. Mathematics of Operations Research, 1978, 3(4):275–281.
[14] LEVITIN G. A universal generating function approach for the analysis of multi-state systems with dependent elements[J].Reliability Engineering and System Safety, 2004, 84(3): 285–292.
[15] TABOADA H A, ESPIRITU J F, COIT D W. MOMS-GA: A multi-objective multi-state genetic algorithm for system reliability optimization design problems[J]. IEEE Transactions on Reliability,2008, 57(1): 182–191.
[16] LEVITIN G, LISNIANSKI A, BEN-HAIM H, et al. Redundancy optimization for series-parallel multi-state systems[J]. IEEE Transactions on Reliability, 1998, 47(2): 165–172.
[17] OUZINEB M, NOURELFATH M, GENDREAU M. Tabu search for the redundancy allocation problem of homogenous series-parallel multi-state systems[J]. Reliability Engineering and System Safety, 2008, 93(8): 1 257–1 272.
[18] LI Chunyang, CHEN Xun, YI Xiaoshan, et al. Heterogeneous redundancy optimization for multi-state series-parallel systems subject to common cause failures[J]. Reliability Engineering and System Safety, 2010, 95(3): 202–207.
[19] AN Zongwen, HUANG Hongzhong, LIU Yu. A discrete stress-strength interference model based on universal generating function[J]. Reliability Engineering and System Safety, 2008,93(10): 1 485–1 490.
杂志排行
Chinese Journal of Mechanical Engineering的其它文章
- Dynamic Manipulability and Optimization of a Two DOF Parallel Mechanism
- Design of Robot Welding Seam Tracking System with Structured Light Vision
- New Method to Measure the Fill Level of the Ball Mill I—Theoretical Analysis and DEM Simulation
- Comparative Analysis of Characteristics of the Coupled and Decoupled Parallel Mechanisms
- New Hybrid Parallel Algorithm for Variable-sized Batch Splitting Scheduling with Alternative Machines in Job Shops
- Multidisciplinary Design Optimization with a New Effective Method