工业机器人在柔性制造系统中的应用与优化
2025-02-21陈旸
摘要:目前工业机器人越来越趋于智能化,通过引入大量的智能技术和大数据技术,并根据实际情况对程序进行修正,促进了工业制造生产活动正常有序的进行。主要介绍了工业机器人的种类和柔性生产线的类别,并详细阐述了工业机器人在柔性制造系统领域的应用原理,深入分析目前存在的问题,给予工业机器人优化改进的建议,希望可以为从业人员提供理论参考和实践指导。
关键词:工业机器人;柔性制造系统;应用;优化
一、前言
随着科学技术的突飞猛进,机械生产产业也迎来前所未有的发展机遇,目前已进入现代制造阶段,机床数控技术已取得有效突破,不断实现机床加工自动化,导致人工劳动被自动化设备逐渐替代。在生产制造过程中,将工业机器人应用于其中可以大幅度提高生产质量,同时还能为生产效率的提高提供保障,具有良好的发展前景和广阔的需求市场。因此深入研究机器人在柔性生产制造行业中的应用具有实际价值。
二、工业机器人的分类
工业机器人根据基本结构组成、操作方法、技术模式、应用类型的不同可以划分成很多种类,按照应用领域的不同可分为搬运、电焊、安装、喷涂、抛光打磨等机器人。搬运机器人最为普遍,主要应用于重物搬运、材料升降、装配生产线等场合,有效降低了人为工作量,并可代替技术人员在恶劣场地下的日常工作[1]。在新能源车制造与钢铁冶金领域,电焊机器人因其高效率的生产能力和卓越的焊接质量而备受瞩目。水平多关节机器人,如可编程PUMA与SCARA类,以其高精度、优良协调性和受限作业范围,频繁应用于电器设备、汽车零部件、发电机、电脑、空调等装配作业中。在制造汽车外壳、仪表等环节,液压驱动的喷涂机器人因其高速运作与卓越的喷涂品质,赢得了广泛的认可与应用。该款机器人具备离线编程功能,有效避免了现场反复调试所导致的进度延误,不仅提升了工作效率,还确保了喷涂作业的品质。在汽车制造、钢材生产及钻石珠宝等行业,抛光打磨机器人作为常用设备,发挥着至关重要的作用。抛光打磨机器人在使用过程中,可以和砂抛设备协调工作,共同提高产品的光洁度和平整度,确保打磨质量满足实际要求。
三、柔性生产线的类别
按照节奏速度的不同,柔性生产线能够划分为流水生产线和非流水生产线,按照自主化标准可以划分为自主化生产线和非自主化生产线。生产自动化是柔性自动化的基础。
工业机器人在自动化设备中的应用具有协同性,自主化生产线系统已成为自主化设备的主流和未来的发展趋势。工业机器人可以适应中、小批量商品的生产,通常与数字控制机床存在紧密联系,成为柔性制作单元或柔造体系重要构成方面。
工业机器人能够代替现场工作人员去从事工作量极大的工作和存在高风险、环境差、强度高、危害性强的工作。工业机器人在应用过程中能够充分发挥潜在功能与价值,完善并改进柔性制造体系中的不足,提高其生产效率和质量[2]。
柔性生产线作为机械生产运行的重要组成部分,其技艺繁琐、自主化的体系,主动融合了微电子科学与技术、软件工程和电气工程等专业领域的知识,有效处理机械制造自动化与高柔性化生产之间的矛盾。
四、SCARA工业机器人工作原理
工业机器人种类繁多,其中SCARA工业机器人应用最为常见,不仅各方面综合性能优良,故障率和保养成本也较低,成为许多柔性制造企业的首选。以下介绍了一种新型SCARA工业机器人的设计应用原理。
相比于传统的结构设计,新一代的SCARA机器人使用的滚珠丝杆花键由丝杆螺母、花键螺母、丝杆三部分组成。由于丝杆中的钢球在螺母与丝杆之间来回滑动,保证了其传动的高效性,其中荷载组成为体系自重和惯性力。体系重力主要包括手腕自重和荷载重力,计算公式如下:
(1)
由牛顿第二定律可知,假设直线运动过程为匀变速直线运动,惯性力由手腕和上部荷载共同产生,计算公式如下:
(2)
由荷载组合定理可知,最大负载力计算如下:
(3)
式中:m3—手腕质量;
mp—负载质量;
K—荷载组合系数。
g—重力加速度,取9.8N/m
a—加速度(m/s2)
滚珠丝杆花键在设计过程中也需要考虑转速的影响,其计算公式如下:
(4)
式中:V—轴臂直线运动速度(m/s);
P—丝杆导程(m);
n—丝杆转速(r/min)。
根据负载力的大小,还可以计算出滚珠丝杆的最大动荷载,具体如下:
(5)
(6)
式中:L0—滚珠丝杆的寿命;
T—普通机械使用寿命;
fH、fw—硬度系数、载荷系数,取值标准见表1和表2。
五、工业机器人在柔性制造系统中的应用
(一)工业机器人在电镀打磨柔性制造系统的应用
目前工业机器人在电镀技术的抛光打磨柔性制造系统中得到广泛应用。该制造系统由多个相互影响的加工单元结合而成,每个加工单元由砂抛设备、布抛仪器、六自由度机器人以及材料更换体系组成[3]。大部分柔性加工单元中,高精确度的工业机器人夹持产品元件不断靠近砂抛设备,砂抛设备选择压力调控机制,可以严格控制加工品的受力情况。在电镀抛光工序中,布抛柔性制造仪器确保了工件表面的细致研磨,此环节对工艺至关重要,确保抛光作业中的压力保持恒定,因其稳定性将直接左右最终抛光品质,高精度六自由度工业机器人被采纳,旨在确保工件稳固地附着于布抛机,在布轮电动机系统中,变频器不仅负责实现无级速度调整,更以伺服电机为动力,巧妙调节丝杠运动,确保抛光轮与工件接触点精确变动,进而实现卓越的抛光与研磨成效。
(二)工业机器人在轮毂加工领域的应用
在实现轮毂加工单元自动化生产的全过程中,工业机器人扮演了举足轻重的角色。在汽车轮毂生产全流程中,PLC信号扮演着至关重要的角色,其使命是促成自动化搬运的高效运作,电脑控制系统、伺服驱动装置等核心部件构成了机器人控制柜的核心架构,在机器人系统中,电脑控制系统占据核心地位,必须实时处理各种突发行为,比如数据传输与模式转换等。在电脑控制系统的精准调控下,伺服驱动装置精确操控伺服电机,驱动机器人的关节运动,确保机器人自主灵活移动。总线与外界控制系统或设备之间,通过硬连这一方式,由I/O接口构建起通信的桥梁。执行示教编程任务,旨在操控机器人动作,涵盖系统基础操作层面,包括示教作业、参数调整、程序保存等环节。
(三)工业机器人在货物搬运过程中的应用
工业机器人最明显的优势就是帮助人们降低工作量,取代部分机械式的体力劳动。在柔性制造系统中,将工业机器人应用于搬运生产的现象极其普遍,不仅可以帮助企业节约人力成本,还能够提高生产系统的制造效率和加工质量[4]。
在数字机械控制不断进展的背景下,工件运送环节的智能化与灵活性的提升显得尤为重要,产业经济飞速发展,商品种类繁多,加工环节复杂,企业面临生产周期短暂与库存积压的难题,正着力提升产品质量,以迎合用户多样化需求。在激烈市场竞争中,制造商可通过引入智能化单机设备,借助灵活适应性,并运用机器人搬运装置优化物流输送与智能分配,从而显著提升整体生产流水线与作业区域的智能化水平与适应性,确保自身在竞争中的生存与壮大。
六、工业机器人在柔性制造领域优化策略
在工业机器人设置系统中,其输入输出信号可以划分为物理信号和逻辑信号。信号的接收直接影响编程效果,从而对柔性制造体系产生一定的影响。逻辑信号是从软件侧可存取的信号的总称,物理信号是指被连接与 DC24V、工业总线等外界的输入输出信号的总称。
在控制设备中,传输信号通常被区分为逻辑信号,可直接被应用于机器人程序与用户程序,逻辑信号输入简称I**、逻辑信号输出即O**,在逻辑运算过程中扮演着关键角色。物理信号的输入对应于X**,而物理信号的输出则由Y**所标识。程序中,物理信号的呈现并非必然,在物理信号向逻辑信号转化的过程中,控制设备扮演着信号分配的角色,它将部分物理信号经过处理转换为逻辑信号。在技术不断发展的背景下,技术团队对逻辑信号与物理介质进行了优化与映射,确保两者间的精准对应并实现灵活转换,从而奠定了I/O区域映射运作的核心理念。
在I/O区域映射方面,通过示教编程器,得以完成相应的配置操作,I/O区域映射法能够通过示教编程器进行设定。机器人运动状态与编程方式密切相关,在人工操作的状态下,工业机器人的行为动作会发生不同幅度的变化,同时显示仪记录机器人在运动过程中的关键节点,比如起始位置、提取物体受力点和力臂摆动最大挠度等。智能控制设备可以利用扫描技术测量出相邻动作点之间的直线速度,判断其运动状态,分析计算出运动所持续的时间。通过长时间的观察与分析,技术人员根据目前机器人的运动状态能够预测机器人下段时间的运动趋势。编辑完成的程序能够通过I/O信号来执行,并将运行结果储存于机器人系统。
人工编程控制机器人的基础是熟悉工业机器人的运动坐标系。工业机器人的运动坐标系分为轴坐标、机械坐标和工具坐标,熟练掌握工业机器人在不同坐标系下的动作方向是至关重要的。
通常而言,该工业机器装配有六个轴。在轴坐标系统之下,利用示教编程器独立操控各轴的基本动作,从而显现该机器人个体在特定坐标系内的动态表现。在机械坐标与轴坐标系统的差异中,工业机器人的整体运动,实际上是由多个轴的部分运动汇聚而成,这种运动的综合形式,可以进一步细分为直线、圆周以及不规则蜿蜒曲线三种基本趋势[5]。在对工业机器人生动参数进行设定时,这些坐标系往往是首选,具体步骤如下:
第1步骤,选用合适的示教方法。
第2步骤,手动输入正确的程序代码。
第3步骤,记录移动代码指令。手动操作将工业机器人移至记录点,按下记录按钮,通过信息处理技术将全过程记录储存下来,并设定重复命令,反复记录关键步骤。此外,还需记录应用命令。应用命令包括将信号输出到外部、等待输入信号、程序调用等非移动命令。
第4步骤,程序运行结束后,记录终止命令。
第5步骤,完成示教确认工序。依次反复检查记录步骤,核对记录位置与工业机器人实际运动轨迹是否一致。
第6步骤,完成示教内容修改调整工作。若检查记录步骤存在错误,技术人员可以在系统设置模块进行增加和删减操作,促进后续工作的顺利进行。
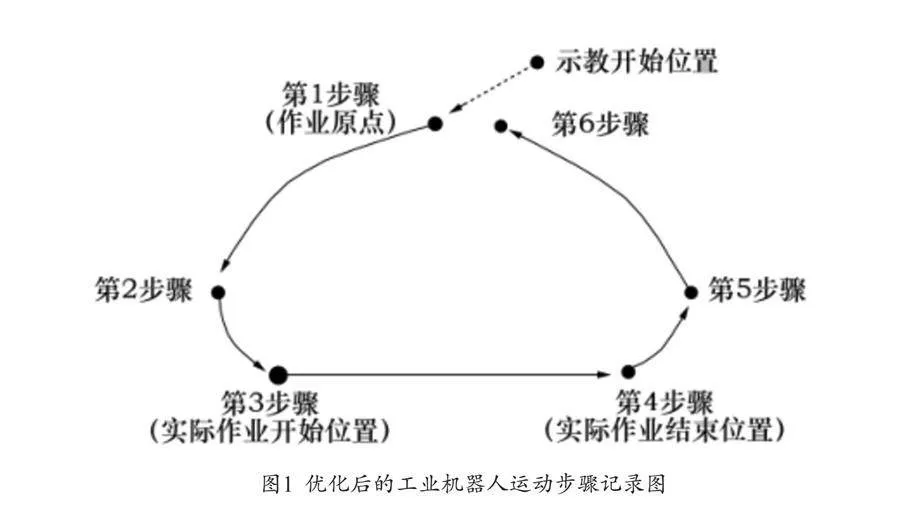
如图1所示,编程优化后的工业机器人在运动过程中的全过程都形成了各点相互连接的轨迹曲线,自第1步骤依次移动至第5步骤,并记录第2、3、4步骤停留的具体位置,在第6步骤,为使其与第1步骤位置相同,进行记录位置的闭合,依次反复,形成循环性和周期性。因此,工业机器人的创新与优化工作对柔性制造业具有重要作用。
七、未来发展前景
在国民经济飞速发展以及制造行业高质量进步的背景下,工业机器人的应用范围也在不断拓宽。目前而言,技术人员应注重各类新型技术的创新与优化,从而满足各种项目的应用需求,尤其是多自由度、多功能机器人的开发与研究,需要引起技术研发人员的高度重视。此外,机械运行速度和实际操作精度也需要提高,合理设置工业机器人的质量、体积和工作区域,同时机器人的功能使用模块也必须实现高度科学化、系统化、规范化。
针对感觉传感器和温度检测元件的生产,企业应当加强技术人员的研发力度,不但要从本质上延长传感器元件的最大使用寿命,还要能够进一步提高检测结果的精确度,为机械生产制造创造有利条件。
八、结语
综上所述,工业机器人在柔性制造系统得到广泛应用,不仅能够从根本上提高制造效率和生产质量,还能最大限度地节约开支,降低人工工作量和劳动力的使用,同时还可以取代工作人员从事有毒有害的工作。经过多年的发展,工业机器人种类繁多,SCARA工业机器人应用非常普遍,在设计过程中,确保各项指标可以满足柔性制造体系的实际需求。工业机器人在电镀产品抛光打磨领域和轮毂加工方面得到有效应用,为企业节约了大量的人工劳动力和设备,同时创造显著的经济效益。后续改造过程中需要从信号编程方面入手,根据智能坐标系统来为机器人系统编程优化工作提供指导,工业机器人不断优化更新也对国民经济的提升具有重要意义,未来拥有良好的发展前景和改进空间。
参考文献
[1]王攀攀,毕玉珊,李超新.工业机器人在柔性制造系统中的应用[J].南方农机,2019,50(16):19-20.
[2]张佳晨,黄郁.柔性制造系统中工业机器人ATC设计选型要点[J].时代汽车,2023(05):115-117.
[3]陈盛.工业机器人柔性制造系统实训中心建设及成效研究[J].造纸装备及材料,2023,52(08):208-210.
[4]张杰.我国工业机器人辅助柔性生产的新发展[J].现代制造技术与装备,2009(05):75-77.
[5]成文娟,陈银树,尹序臻,等.柔性制造系统中智能运送机器人的设计与实现[J].福建轻纺,2020(03):29-32.
基金项目:1.2023年福建省自然科学基金项目(青年创新项目)“高速长寿命滚珠直线导轨自适应定向润滑机理研究”(项目编号:2023J01248);2.漳州职业技术学院教师科研创新团队“精密机械功能部件智能制造科研创新团队”(项目编号:zzyt23002)
作者单位:漳州职业技术学院智能制造学院
责任编辑:王颖振 郑凯津
