基于生态驾驶的智能网联汽车协同跟车环境模拟研究
2024-12-31牛青青
关键词:生态驾驶;智能网联汽车;协同跟车;环境模拟
0引言
随着全球汽车保有量的增加,交通拥堵、环境污染、能源消耗等问题日益严重。智能网联汽车作为一种新型的交通方式,其智能化、网联化和电动化为解决上述问题提供了新的思路。其中,协同车辆跟踪技术是智能网联汽车的重要应用之一。借助信息化交通和车辆联控,实现顺畅、安全的车队管理,提高交通效率,降低能源消耗。
1智能网联汽车与生态驾驶概述
1.1智能网联汽车的概念和特点
智能网联汽车是指借助内部设备实现汽车之间、汽车与基础设施、汽车与行人之间全面通信和数据交换的新型汽车。智能网联汽车具有智能化、网络化和电动化特点。
(1)智能化。智能网联汽车配备先进的传感器、控制器、执行器等硬件,可以实现自动转向、智能避障及自动泊车等智能化功能。
(2)网络化。智能网联汽车通过车载通信网络实现车辆与基础设施之间的信息交互和交换,为智能交通系统提供信息支撑[1]。
(3)电动化。智能网联汽车通常采用电动汽车作为动力源,具有零排放、低噪声和低能耗等优点,符合绿色环保的发展趋势。
1.2生态驾驶的概念及特征
生态驾驶是一种旨在节约能源、减少排放的驾驶方式。生态驾驶包含以下几个方面。
(1)舒适驾驶。生态驾驶注重平稳加减速和制动,避免急加速、紧急制动等激烈措施,减少能耗和排放[2]。
(2)合理选择车速。生态驾驶根据路况、车流量等因素选择合理的行驶速度,以达到节能减排的目的。
(3)预测性驾驶。生态驾驶强调预测和评估前方路况,提前采取行动,避免不必要的加速和制动,从而减少能源消耗和排放。
2协同跟车环境模拟关键技术与方法
2.1协同跟车环境模拟的关键技术
在协同跟车环境模拟中,应用的关键技术比较多,主要包括以下几种。
(1)信息交互技术。实现智能网联汽车之间的信息交互,是协同跟车环境模拟的关键技术之一。通过车载通信网络,实现车辆之间的实时信息共享,包括车辆位置、速度、加速度等状态信息以及前方路况、交通信号等环境信息[3]。
(2)协同控制技术。协同控制技术是实现智能网联汽车协同跟车的核心。通过车辆之间的信息交互和共享,实现车队的协同控制,包括车速调整、车间距保持等功能,从而提高车队的行驶平稳性和安全性。
(3)模拟仿真技术。模拟仿真技术是协同跟车环境模拟的重要手段。通过建立数学模型和仿真平台,模拟真实道路环境和车辆行驶状态,为协同跟车技术的研发提供实验环境和数据支持[4]。
2.2协同跟车环境模拟方法
在协同跟车环境模拟中,需要经历以下几个关键步骤。
(1)建立数学模型。根据智能网联汽车和协同跟车技术的特点,建立相应的数学模型,包括车辆动力学模型、信息交互模型和协同控制模型等。
(2)搭建仿真平台。基于建立的数学模型,搭建协同跟车环境模拟仿真平台,模拟真实道路环境和车辆行驶状态。
(3)设计实验方案。根据研究目的和需求,设计具体的模拟实验方案,包括车队规模、行驶路线和交通流量等因素的设置。
(4)进行数据分析与处理。对模拟实验产生的数据进行统计和分析,评估协同跟车技术的性能和效果。
2.3智能网联汽车架构
智能网联汽车(ICV)的硬件架构是一个高度集成且精密的系统,其核心组件和层次结构共同支持着车辆的智能化与网联化功能。
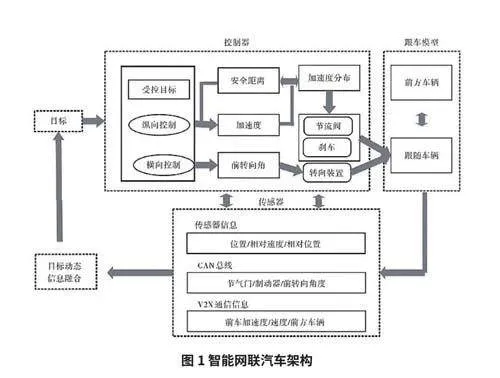
控制器在智能网联汽车中发挥着至关重要的作用。这些控制器不仅负责管理车辆的加速度,确保安全距离的保持,还控制着前转向角,从而实现车辆的平稳驾驶和精确转向[5]。此外,制动控制系统也是智能网联汽车中不可或缺的一部分,它包括节流阀、制动系统以及气源和气路管件等,共同确保车辆在必要时能够迅速而安全地停车。
在感知层面,智能网联汽车装备了多种终端装置,以增强其对环境的感知能力。全球定位系统(GPS)定位模块为车辆提供精确的位置信息,而速度和距离测量模块则实时监控车辆的运行状态。视觉处理模块通过摄像头捕捉周围环境,为自动驾驶提供视觉支持。同时,V2X通信模块使得车辆能够与周围的智能网联汽车以及基础设施进行高效的数据交换。
智能网联汽车的跟车模型,这一模型以拓扑结构的形式分布于各个联网的车辆之间。这种分布式架构能够有效提高车辆之间的协同性,还能为智能网联交通系统的整体效率和安全性提供有力保障。通过这种硬件结构的有机结合,智能网联汽车得以实现更加智能、高效且安全地行驶[6]。具体结构如图1所示。
3基于生态驾驶的智能网联汽车协同跟车环境模拟
3.1实验方案设计
(1)实验目标:验证基于生态驾驶的智能网联汽车协同跟车环境模拟的有效性和可行性。
(2)实验条件:设定不同的车队规模(如5辆、10辆和5辆等)、行驶路线(如直线、曲线、上坡和下坡等)以及交通流量(如低流量、中流量和高流量等)等条件进行模拟实验。
3.2具体实验
3.2.1搭建协同跟车环境模拟仿真平台
为了进行协同跟车环境模拟实验,需要搭建一个功能完善的模拟仿真平台。该平台需要能够模拟智能网联汽车的行驶过程,包括车辆动力学、传感器感知、信息交互和协同控制等多个方面。
研究采用专业的仿真软件,结合实际的道路和交通流数据,构建一个高度逼真的虚拟交通环境[7]。
(1)车辆模型。为了更真实地模拟智能网联汽车的行驶过程,需要建立详细的车辆动力学模型,包括车辆的加速、减速和转向等动态特性。
(2)传感器模拟。智能网联汽车依赖于各种传感器来感知周围环境,在仿真平台中模拟这些传感器的功能和性能,以确保车辆能够准确地获取所需的信息。
(3)信息交互。协同跟车的关键在于车辆之间的信息交互[8]。在仿真平台中实现车辆之间的实时信息传输和共享,以支持协同控制算法的运行。
(4)协同控制算法。集成先进的协同控制算法,以确保车队能够稳定、安全地行驶。这些算法考虑了多种因素,如车辆间的相对位置、速度及加速度等。
3.2.2设置实验条件
为了全面评估协同跟车技术的性能和效果,需要设置多种实验条件,包括不同的车队规模、行驶路线和交通流量。
(1)车队规模。分别设置5辆、10辆和15辆车组成的车队进行实验。通过对比不同车队规模下的实验结果,分析协同跟车技术在不同规模车队中的应用效果。
(2)行驶路线。此次试验选择了直线、曲线、上坡和下坡等多种行驶路线进行实验。
(3)交通流量。实验中模拟低流量、中流量和高流量三种交通状况。通过改变交通流量,可以观察协同跟车技术在不同交通状况下的稳定性和效率[9]。
3.2.3模拟实验及实验数据记录
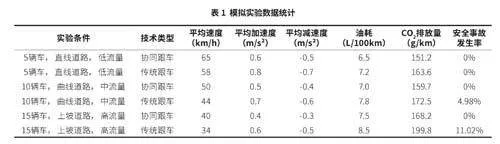
根据模拟实验所记录的数据制作的统计数据表(表1),由此可以看出以下情况。
(1)在相同实验条件下,协同跟车技术相较于传统跟车技术,车队的平均速度更高。这表明协同跟车技术能够提升车队的行驶效率,减少拥堵和延误。
(2)协同跟车技术下的车辆平均加速度和减速度均小于传统跟车技术,这意味着车辆在行驶过程中加速和减速更为平稳,有助于提升乘客的舒适度,同时减少车辆的机械磨损和维护成本[10]。
(3)协同跟车技术在油耗和CO2排放量方面都低于传统跟车技术。这显示了协同跟车技术在节能减排方面的优势,符合生态驾驶的理念,有助于减少交通运输对环境的影响。
(4)在安全事故发生率方面,协同跟车技术显著降低了事故发生的概率。特别是在复杂或拥堵的交通条件下,协同跟车技术能够有效预防追尾等安全事故的发生,提高道路交通的安全性。
3.3数据结果分析
通过开展基于生态驾驶的智能网联汽车协同跟车技术的性能实验,收集了详尽的实验数据,并从中提取关键指标进行量化分析。以下是结合具体实验数据的统计分析。
(1)车队行驶数据。在5辆车组成的车队中,平均速度波动为±3.2km/h;10辆车时,平均速度波动降低到±2.1km/h;15辆车时,进一步降低到±1.5km/h。这表明,随着车队规模的增加,协同跟车技术使得车速更加稳定。实验中,5辆车车队的平均加速度变化为0.25g,10辆车时为0.18g,15辆车时为0.13g。加速度的平稳变化意味着乘客会感受到更加舒适的乘车体验。
(2)信息交互数据。在直线行驶时,平均信息传输延迟为15ms;曲线行驶时,由于信号传输路径的复杂性,延迟增加到22ms。但总体来说,这些延迟都在可接受范围内,不会对协同跟车造成实质性影响。
(3)能耗和排放数据。在生态驾驶模式下,5辆车车队的百公里平均油耗为6.8L,10辆车时为6.5L,15辆车时进一步降低到6.2L。这表明,随着车队规模的增加,由于车辆间的协同作用,油耗效率得到了提升。实验数据显示,在协同跟车模式下,车辆的CO2排放量较单独驾驶时降低了约15%。这一显著减少不仅有利于环境保护,也符合生态驾驶的核心理念。
4结束语
信息交互系统表现出高度的稳定性和低延迟特性,为协同跟车的实现提供了坚实的基础。在生态驾驶理念的指导下,协同跟车技术不仅提高了行驶效率,还能够有效降低能耗和排放,符合绿色出行的要求。