车用异步电机变论域模糊PID矢量控制系统研究
2024-12-24林立王凯湘胡江林王智琦林敏之










摘 要:针对车用异步电机因电机参数变化和负载波动而导致性能变差问题,设计了一种基于矢量控制的变论域模糊PID控制策略。采用变论域模糊PID控制实现控制参数自整定和控制规制自调整,并将其运用于MATLAB/Simulink搭建异步电动机矢量控制策略中。仿真结果表明,基于变论域模糊PID矢量控制的复合控制策略具有响应速度快、超调量小和抗干扰能力强的优点。实验结果表明,该算法是有效的,能够实现对电机的实时控制,具有一定的实用价值。
关键词:异步电机;变论域;模糊PID控制;矢量控制
中图分类号:TM343""" 文献标志码:A
Variable universe fuzzy PID control system for vehicle asynchronous motors based on vector control
Abstract: A variable universe fuzzy PID control strategy based on vector control was developed to address the performance decline of asynchronous motors in vehicles, which can occur due to changes in motor parameters and fluctuations in workload. This strategy employed variable universe fuzzy PID control for self-tuning control parameters and self-adjusting control regulations. It was compared with traditional PID control strategy and fuzzy PID control strategy in a simulation model of a three-phase asynchronous motor’s vector control system established by MATLAB/Simulink. Simulation results demonstrated that this combined strategy of variable universe fuzzy PID control and vector control offered several advantages, including rapid response, minimal overshoot, and strong resistance to interference. Experimental results further validated the algorithm’s effectiveness in achieving real-time motor control, highlighting its practical value.
Key words: asynchronous motor; variable universe; fuzzy PID control; vector control
近年来,随着国内汽车技术水平的提高以及国家对新能源汽车产业的重视,新能源汽车产业技术的发展已经成为衡量国家综合实力的重要指标之一[1-3]。与传统汽车相比,新能源汽车有着系统结构简单、能耗低和响应速度快的优点。新能源汽车电机驱动系统由驱动电机和电机控制器组成[4]。控制器控制策略决定驱动电机动力输出性能的优劣,传统电机控制方式主要包括恒压频比控制[5]、转差频率控制[6]、矢量控制[7]和直接转矩控制[8],而矢量控制技术在新能源电机控制系统中应用较为广泛。
异步电机具有成本低、耐用性高和高转速性能好的优点,广泛应用于电动汽车领域[9]。异步电机是一个高阶、非线性、强耦合的时变系统[10],经典的PI控制和矢量控制策略具有结构简单和易实现等优点,通常在参数匹配的情况下可获得较好的性能。但汽车运行时道路颠簸(负载多变)、参数时变,往往达不到电动汽车的理想控制效果。因此,为提高整车动力和动态响应,需开发更好的控制策略满足新能源汽车动力需求。本文将变论域模糊PID控制技术与矢量控制算法相结合实现控制参数自整定和控制规则的自调整。该控制策略可根据工况实时设定PID参数进行调整,使异步电机具有更好的控制性能。
1 基于变论域自适应模糊PID控制的异步电机调速系统
1.1 d-q坐标轴下异步电机的数学模型
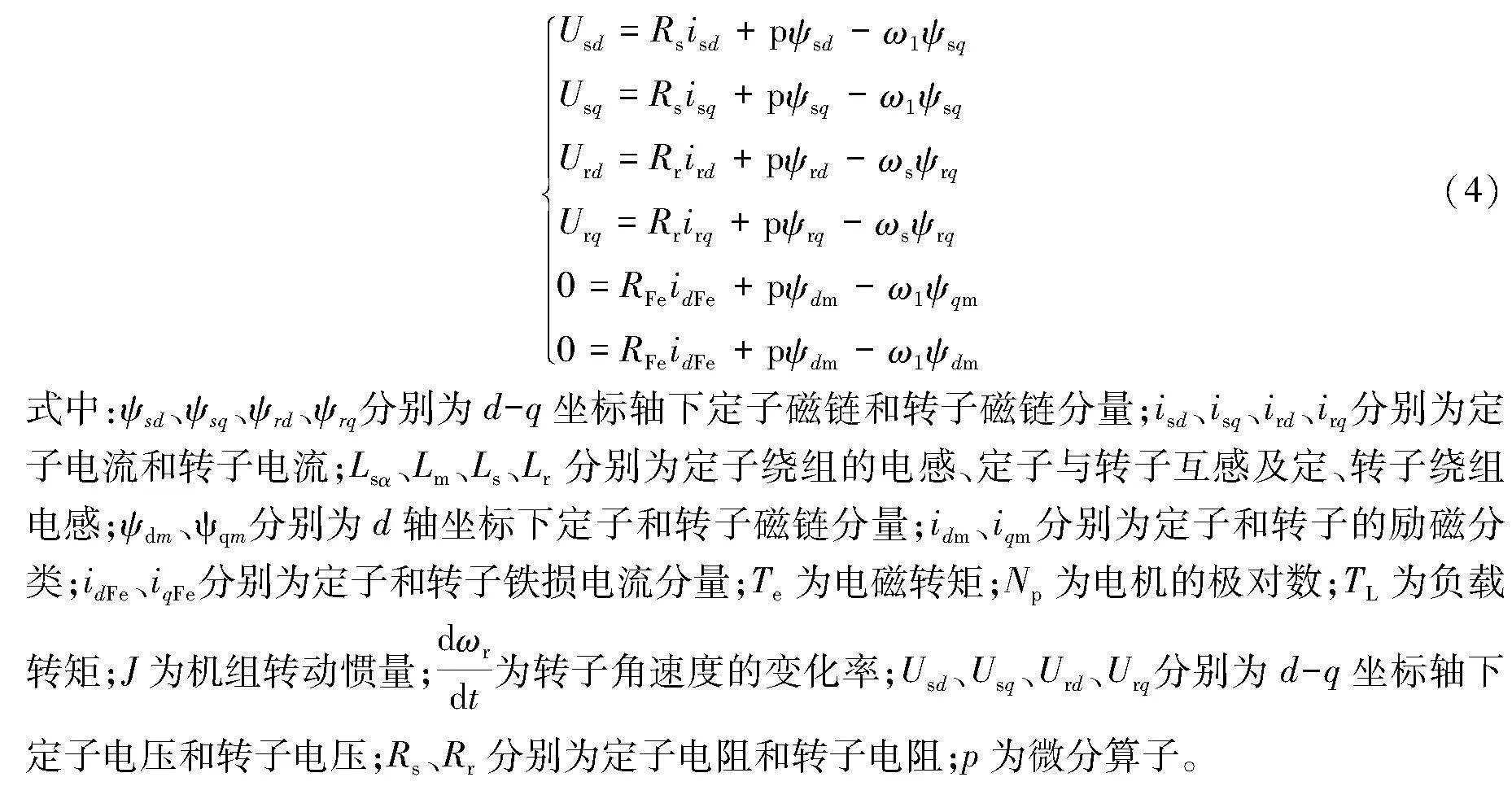
根据异步电机结构的不同,电机可分为绕线型和鼠笼型。研究d-q坐标轴下异步电机的数学模型时,经常将其视为理想电机[2]。
1)忽略空间谐波。假设三相绕组对称分布,空间差为120°。磁动势沿着气隙是正弦的。
2)忽略磁路的饱和。假设每个绕组的自感和互感是恒定的。
3)忽略异步电机的铁损。
4)忽略频率变化和温度变化对绕组电阻的影响。
在以上条件下,三相异步电机的数学模型为
磁链方程:
转矩方程:
运动方程:
电压方程:
1.2 控制系统总体结构
通过坐标变换,将定转子电流分解成励磁电流分量和转矩电流分量。如图1所示,该系统将三相异步电机定子电流ia、ib、ic通过Clark变换转化为静止两相正交坐标系α-β下的方程,再通过Park变换为同步旋转坐标系MT轴下的直流分量ism和ist作为电流反馈量。给定转速n*与电机反馈量n进行误差计算后通过变论域模糊PID控制(VUF+PID)输出用于控制T轴分量的i*st。M轴电流分量i*sm和i*st分别与反馈量ism和ist误差计算后通过磁通PID控制器和转矩PID控制器输出旋转坐标系下的电压分量u*sm、u*st。再经过Park逆变换生成α-β两相静止坐标系下的电压分量u*sα、u*sβ,最后生成空间矢量脉宽调制(space vector pulse width modulation,SVPWM)控制电机[3]。
2 模糊PID控制系统
模糊PID控制是在经典PID控制基础上引入模糊思想。相比经典PID控制,模糊PID可根据实际情况实时调节PID参数。特别是在复杂的电机运行工况下,模糊PID控制可实现在线修改规则达到较优的控制性能。
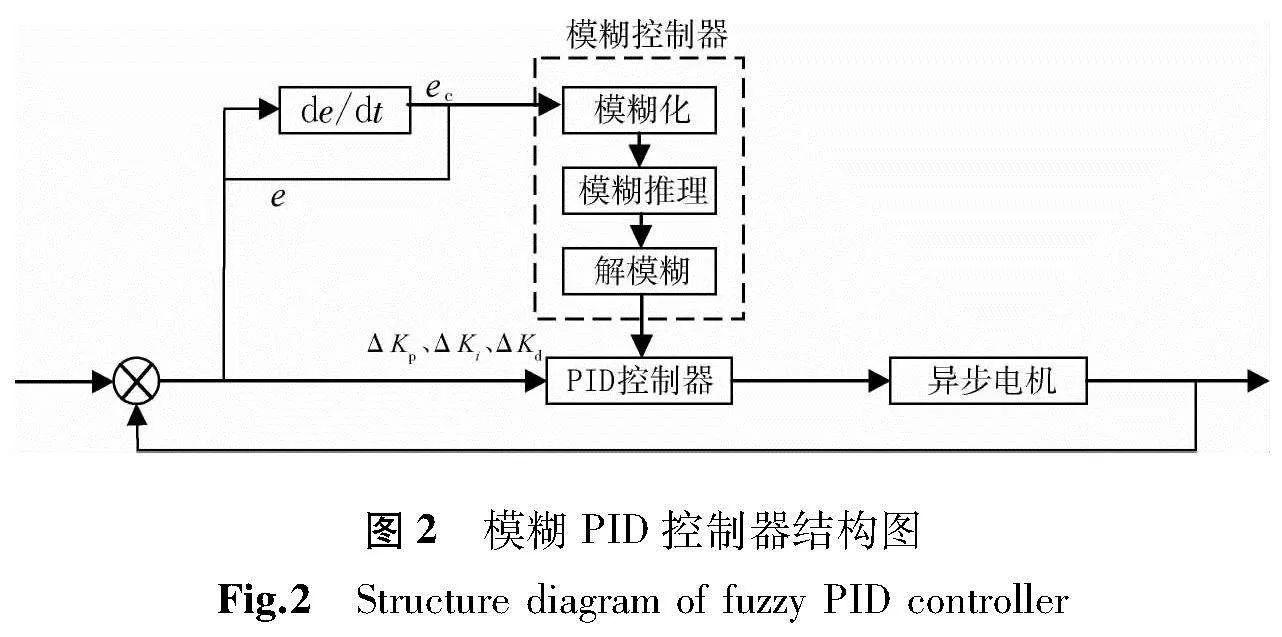
图2为模糊PID控制器结构的整体设计,模糊控制器的输入量为误差e、误差变化为ec,通过模糊化、模糊推理和解模糊3个流程可以自适应分别调整输出动态参数ΔKp、ΔKi和ΔKd。
其中模糊控制器采用“Mamdani”模糊推理方法,采用重心法进行解模糊输出为
式中:ΔKm为参数变化量;μU(zi)为对应隶属度函数值;zi为模糊控制输出值;n为模糊规则的数量。经过模糊控制器输出后的参数与传统Kp0、Ki0、Kd0分别叠加,实现参数的实时优化。设定PID控制参数调整量为
Kp=Kp0+ΔKpKi=Ki0+ΔKiKd=Kd0+ΔKd(6)
则系统实际控制输出为
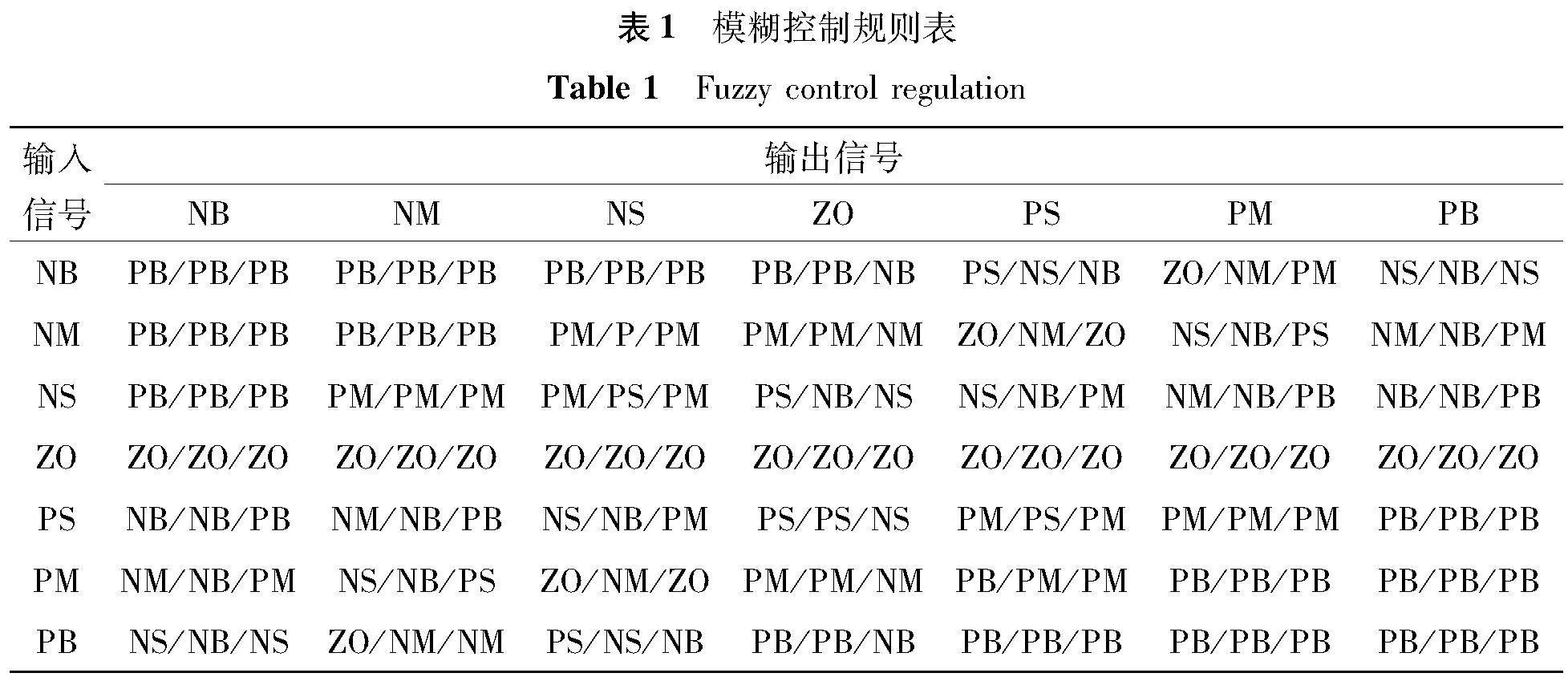
模糊控制规则表是模糊控制的核心内容,它基于操作者的知识和长期的经验。模糊控制规则表将输入和输出信号分成7个度量,包括负大、负中、负小、零、正小、正中、正大,分别对应为NB、NM、NS、ZO、PS、PM、PB。e、ec和输出变量的理论设置为[-3,3]。ΔKp、ΔKi、ΔKd在不同阶段的模糊控制规则如表1所示。
3 变论域自适应模糊PID控制系统
虽然模糊PID参数整定经验或方法获得可行的控制效果。但整定的过程具有一定的局限性和盲目性,导致在线调整时间长等问题[4]。尽管初始论域、初始规则通过在线调整一般能保证系统的稳定性,但其规则具有一定的冗余性,精度也是固定的。尤其当实际输入误差很小时,如当位于模糊规则的中间范围,此时控制的精度非常小。通过加入变论域后,论域可以随误差改变,提高精度并使得初始论域得到了简化,增强了模糊控制系统的容错能力。
在模糊控制器的基础上增加伸缩因子环节,在不改变模糊规则的情况下,伸缩因子基于e和ec的变化来解析出论域自适应规律,设输入变量e(t)和ec(t)的初始论域分别为[-E1,E1]和[-E2,E2],输出变量的初始论域为[-U,U],引入伸缩因子的变论域公式为
XΕ=-α(e)Ε1,α(e)Ε1XΕC=-α(ec)Ε2,α(ec)Ε2XΕC=-βα(e),α(ec)U,βα(e),α(ec)U(8)
式中:α(e)为e(t)的伸缩因子;α(ec)为ec(t)的伸缩因子。
变论域模糊PID控制器的结构如图3所示。
伸缩因子α(e)、α(ec)直接选用某些特殊函数,能够有效避免缺乏完善模糊规则导致的系统控制性能降低。伸缩因子β则设置模糊子集,分别采用{B,M,S,VS},{VB,B,M,S,VS}。
设定输入量e和ec各自论域的伸缩只与自身变化有关,输入论域的伸缩因子为
式中:e为输入量;E为参考值;τ为指数参数;ε为正的常数。当εgt;0,τgt;0,α(e)为e(t)的伸缩因子,α(ec)为ec(t)的伸缩因子。
4 仿真及结果
4.1 系统仿真框图
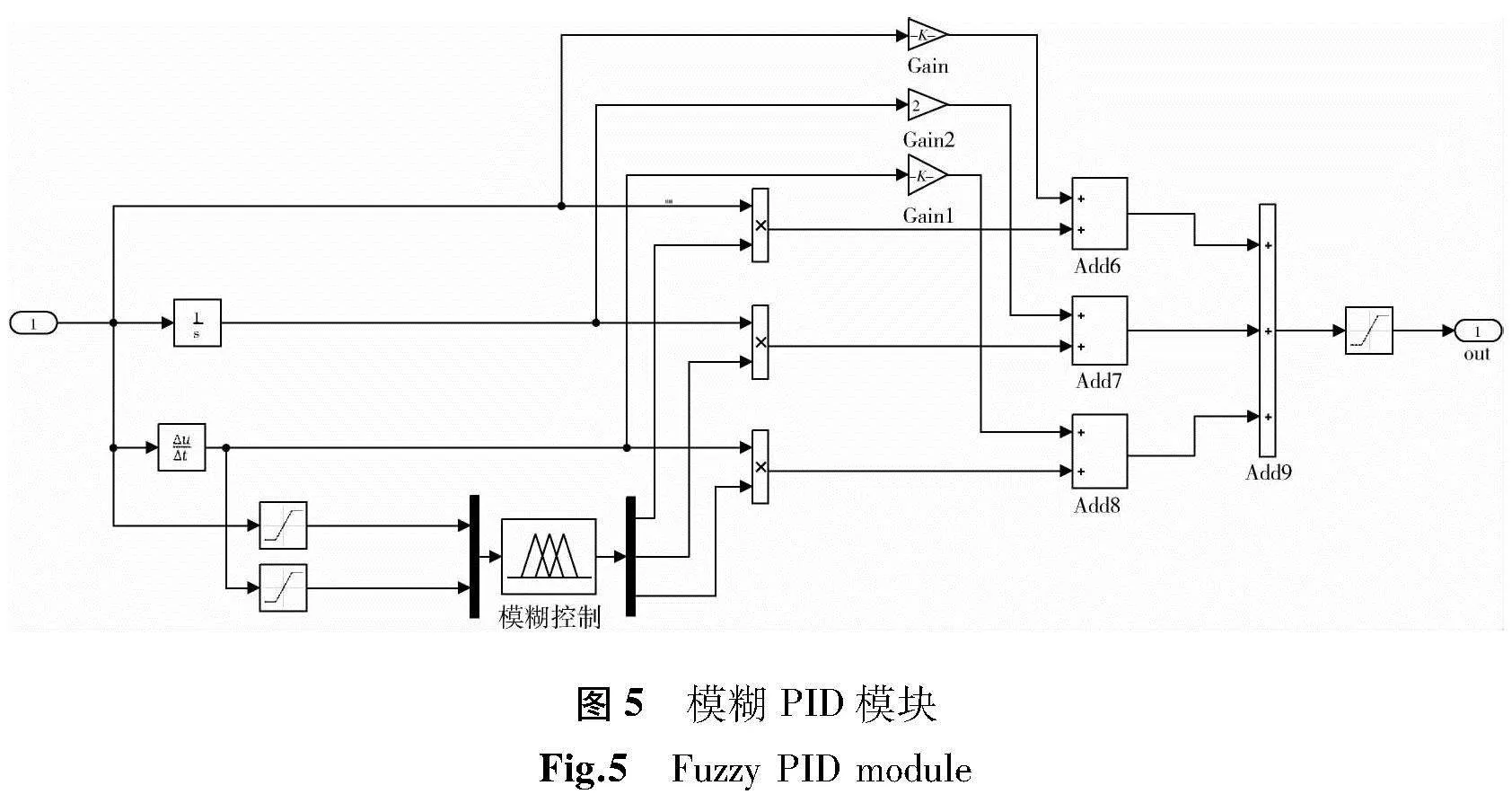
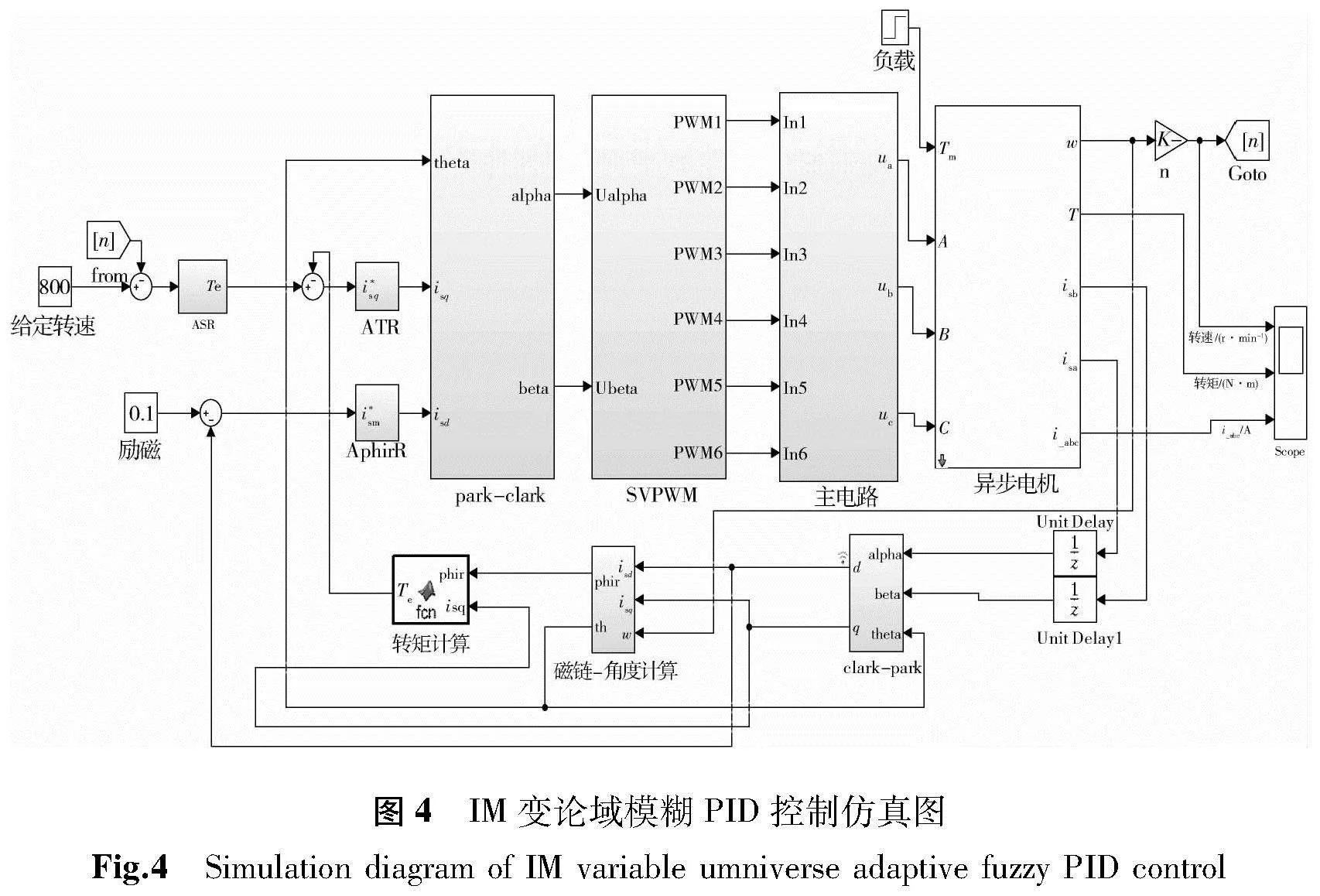
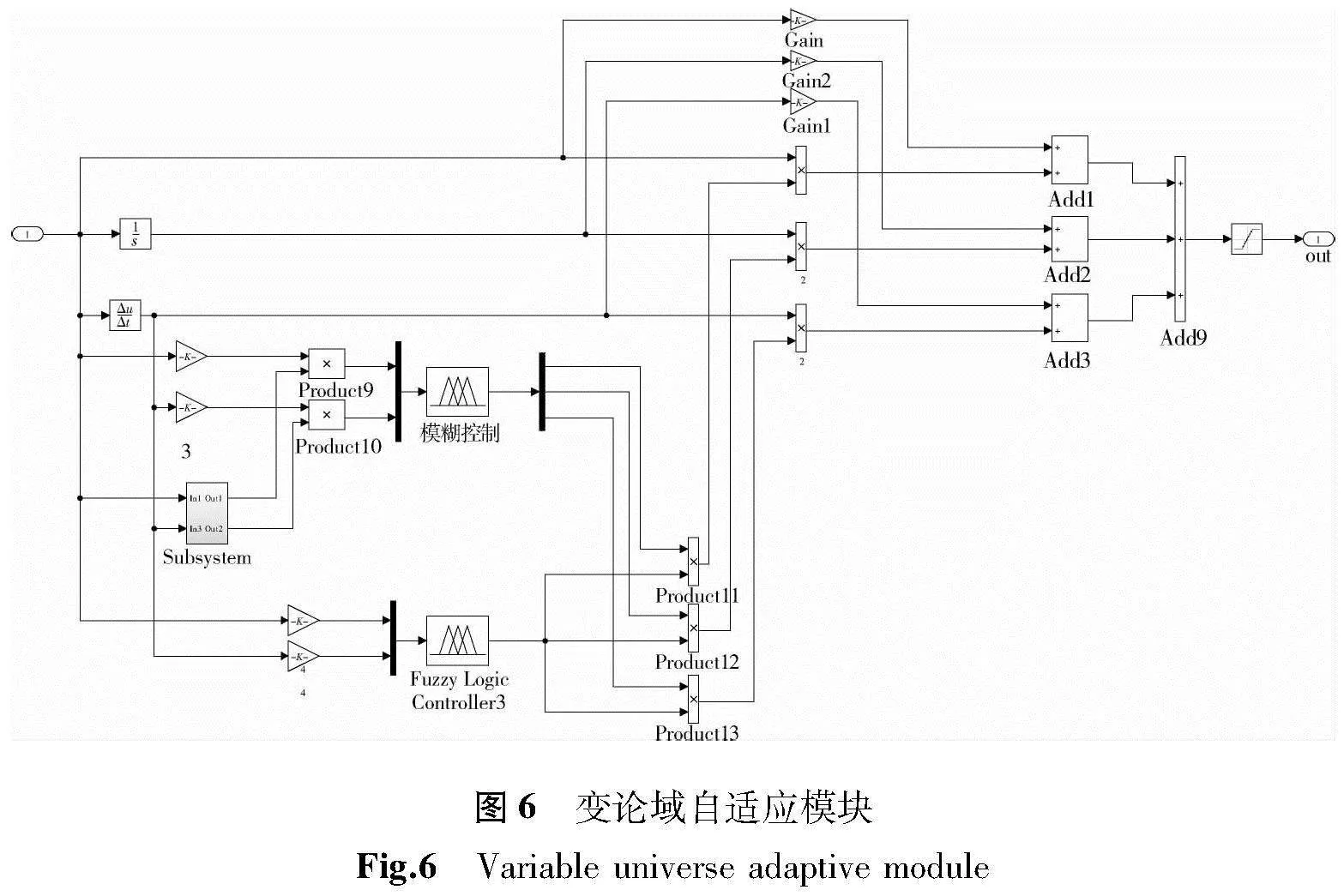
为了验证上述控制方案在矢量控制中的有效性,基于MATLAB/Simulink搭建三相异步电机矢量控制系统的仿真模型,速度环分别采用经典PID算法、模糊PID和变论域模糊PID控制策略并对其控制方式进行比较。图4~图6分别为IM变论域模糊PID控制系统仿真图、模糊PID模块和变论域自适应模块。
4.2 仿真及结果
被控对象为鼠笼式异步电机,其各项参数为:额定功率2 200 W,额定电压380 V,转动惯量0.19 kg·m2,极对数2,定子电感0.002 H,转子电感0.071 H,定转子互感0.069 H。
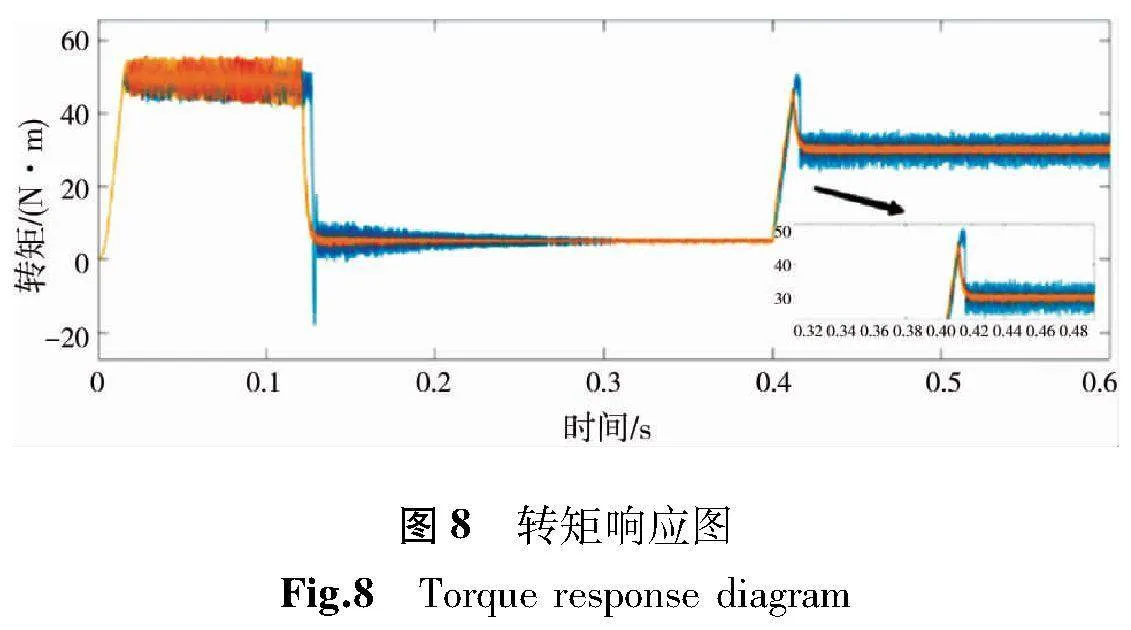
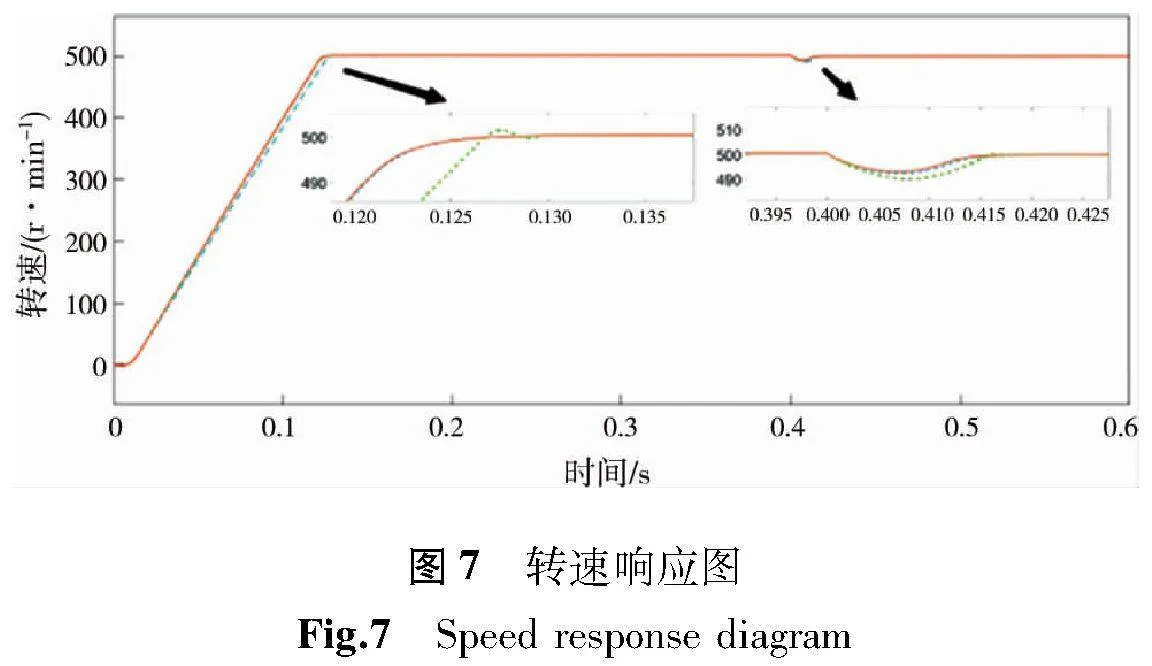
仿真时启动负载TL=5 N·m,在0.4 s时突加负载TL=30 N·m,图7给出了在刚达到设定转速和在0.4 s时突加负载转速局部放大图。由图7可得:相比于模糊PID控制,变论域模糊PID控制有着更快的响应速度,无超调量,抗干扰能力强。超调量从0.3%减少到0。图8给出了系统的电磁转矩,得出电磁转矩变论域PID稳定性优于传统PID。
5 实验结果及分析
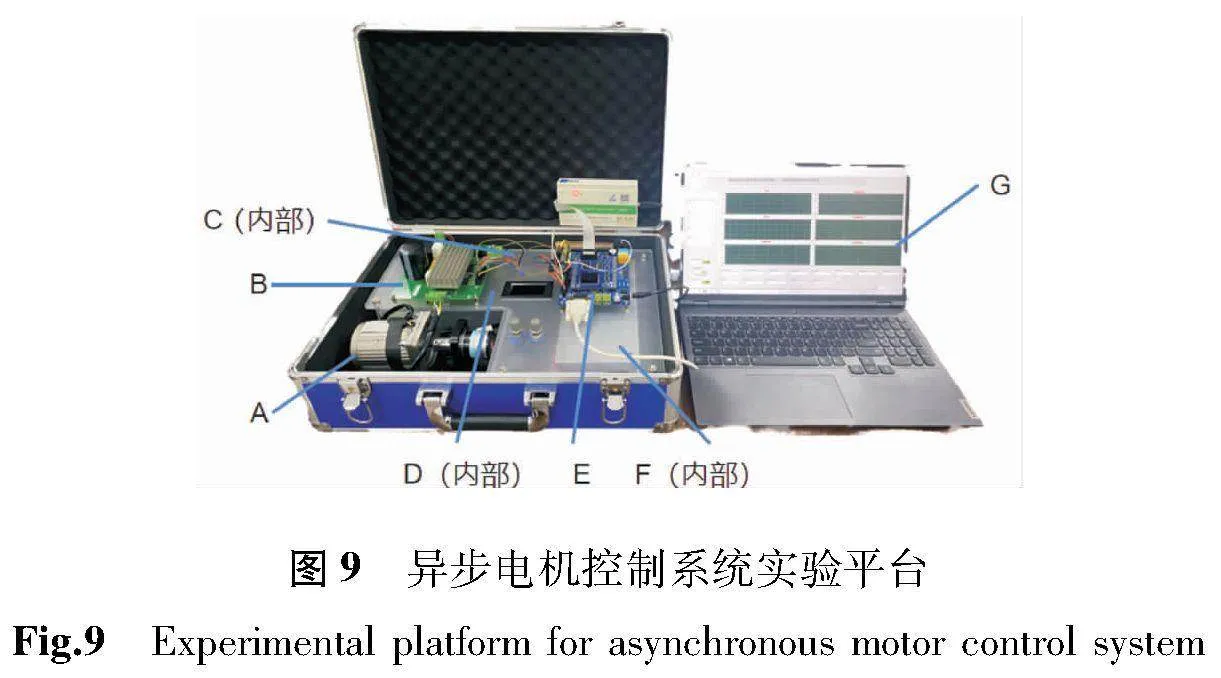
以异步电机控制系统实验平台为参考模型,完成对小型异步电机控制实验平台的搭建。图9为异步电机控制系统实验平台,该实物平台由A、B、C、D、E、F和G一共7部分组成。其中A为异步电机,B为驱动板,C为3.3~5 V模块,D为24 V电源,E为DSP控制板,F为220 V开关电源,G为上位机。将在此实物平台上对VUFPID和常规PID矢量控制系统进行实验验证。
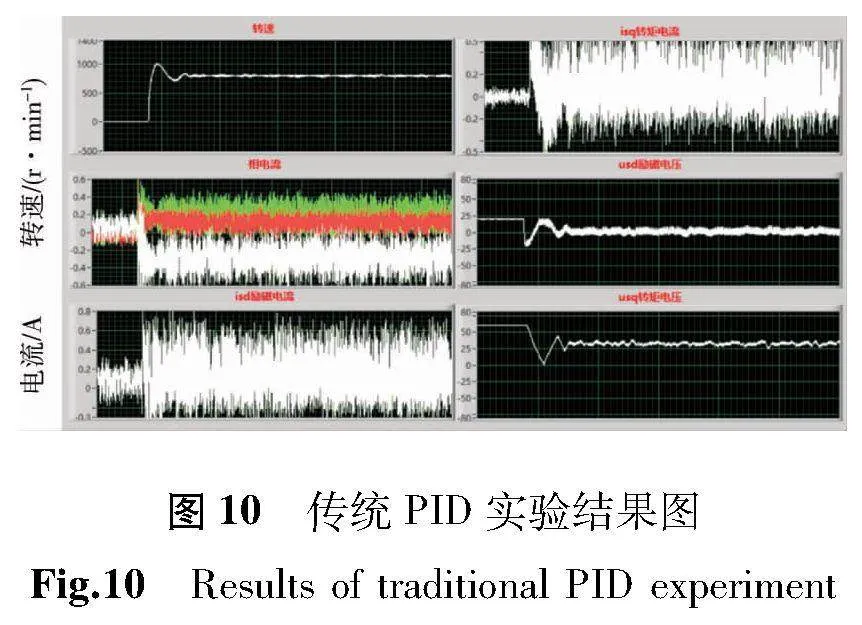
在异步电机控制中,监控界面可观测到电流、电压、转速等信息,其中转速单位为r/min,电流单位为A,在实验平台上对电机给定的转速为800 r/min。
实验结果分析:图10和图11中传统PID控制与变论域模糊PID控制策略为空载实验结果。在实验条件相同的条件下,给定转速为800 r/min 时,变论域模糊PID控制策略与常规PID控制相比,变论域模糊PID超调量小,动态响应速度较快。与仿真分析的结果相同,验证了算法的可行性。
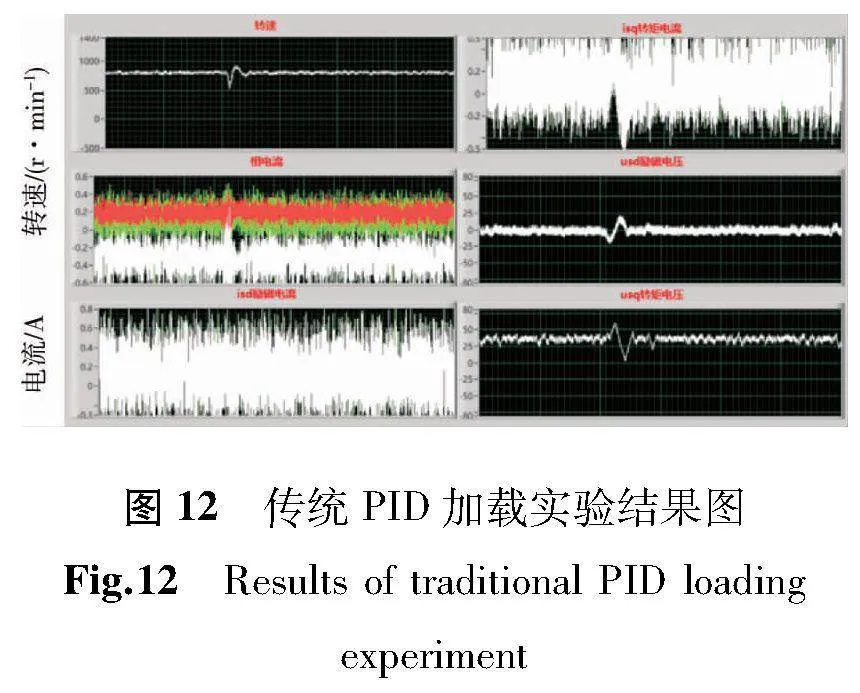
图12和图13为传统PID控制、变论域模糊控制的抗干扰性能实验结果。相对于传统PID控制策略,变论域模糊PID控制策略有着更好的抗干扰性,可以得出本文提出的变论域模糊PID控制策略的方案可行性。
6 结论
本文首先搭建传统PID异步电机矢量控制系统展开分析,再将传统 PID 控制基础上引入了模糊控制概念,形成了模糊PID控制,使得新能源汽车拥有较好的动态响应和抗干扰能力。为了提高其模糊的精确度,减少调试时间和误差,进一步引入变论域思想,设置一种基于变域论的模糊PID控制器,将其运用到速度环。仿真试验表明,该方法具有动态响应速度快和抗干扰能力强的特点。该方法具有较好的应用价值。
参考文献:
[1]童莉莉, 丁永根, 李星明. 车用电机控制器散热结构及热仿真分析[J]. 微特电机, 2021, 49(11): 30-33, 37.
[2]王智琦, 林立, 陈红专. 车用异步电机与弱磁调速协同耦合仿真[J]. 邵阳学院学报(自然科学版), 2022, 19(4): 10-16.
[3]何基都, 郑永军, 谭彧, 等. 异步电机模糊免疫PID矢量控制系统[J]. 电机与控制应用, 2013, 40(5): 13-15, 48.
[4]胡勤丰, 陈威振, 邱攀峰, 等. 适用于连续加减速的永磁同步电机模糊增益自调整PI控制研究[J]. 中国电机工程学报, 2017, 37(3): 907-913.
[5]谢佩军, 张育斌, 吴文贤. 基于改进离散灰色预测的变论域模糊PID灌溉控制[J]. 武汉大学节水灌溉, 2022, 323(7): 36-43.
[6]黄斌, 吕帮俊, 陈佳宝, 等. 基于变论域模糊控制的X舵潜艇空间机动与试验验证[J]. 华中科技大学学报(自然科学版), 2023, 51(11): 149-156.
[7]但其巧. 基于变论域模糊控制的永磁同步电机预测控制研究[D]. 合肥: 安徽大学, 2023.
[8]曹凤斌, 周士贵, 俞力豪,等. 基于变论域模糊控制策略的PMSM无传感器控制[J]. 微电机, 2024, 57(6): 40-46.
[9]马幼捷, 王福森, 周雪松. 基于模糊变论域的直流变换器改进自抗扰控制[J]. 电力电子技术, 2023, 57(11): 106-109.
[10]王椿, 贾磊, 王国辉, 等. 车辆磁流变半主动悬架变论域模糊PID控制[J]. 现代制造工程, 2023, 23(8): 59-65.
