基于航行状态的多元避碰周界研究
2024-10-31刘浩丁仕风周利刘仁伟


摘 要: 为实现船舶智能航行,建立基于船舶航行状态的多元避碰周界.通过识别船舶航行风险,分析避碰双方的主尺度、航速、航向等多元因素对航行安全的影响机制,提出危险周界和预警周界的解析表达方法,构建面向海上安全航行的多元避碰周界.通过实例分别模拟了多航行状态的船舶和复杂海上障碍物的数字化安全界限,初步验证了多元避碰周界的可行性,可作为船舶避碰决策、船舶智能航行的理论参考.
关键词: 航行安全;船舶避碰模型;船舶运动状态
中图分类号:U676. 1"" 文献标志码:A"""" 文章编号:1673-4807(2024)02-001-07
Research on multi element collision avoidanceperimeter based on navigation states
Abstract:In order to realize intelligent navigation of ships, multiple collision avoidance boundaries based on ship navigation status are established. By identifying the risk of ship navigation and analyzing the impact mechanism of the main dimensions, speed, course and other multiple factors of both sides of collision avoidance on navigation safety, an analytical expression method of the danger perimeter and the early warning perimeter are proposed, and the multiple collision avoidance perimeter for safe navigation at sea is constructed. The feasibility of the multiple collision avoidance boundaries is preliminarily verified by simulating the digital safety boundaries of ships in multiple navigation states and complex obstacles on the sea through examples. It can be used as a theoretical reference for ship collision avoidance decision-making and ship intelligent navigation.
Key words:navigation safety, ship collision avoidance model, ship motion state
船舶在航行过程中,通常会与其他物体保留一段缓冲性空间[1].在欧洲海事安全局2020年海上事故统计中[2],航行事故(碰撞、搁浅和接触)是船舶伤亡的最大部分,占43%.船舶领域作为航行安全领域的重要理论,在船舶避碰决策、智能航行领域有重大意义.文献[3-4]提出了由雷达数据统计得出的椭圆形船舶领域.文献[5]假设领域的大小与船长成线性关系,与船速成二次关系,且每个方向的安全距离与极角有关.并通过遗传算法来确定角度、船长和船速与船舶领域的系数.文献[6-7]通过从船员处获取数据,再利用神经网络,分别在狭水域与开放水域构建出模糊船舶领域.文献[8]结合目标船舶周围船舶密度建立了三扇区领域模型.文献[9]基于文献[8]的成果,建立了偏心圆形模型.文献[10]提出船舶领域的大小受船舶尺度、船舶速度、会遇角度和能见度等多种因素的影响.文献[11]针对泰晤士河的某一段航道,通过咨询各种相关人士得到了船舶领域长短轴的相关参数.文献[12]提出了由船长决定的椭圆形船舶领域.在文献[13]提出的四元动态船舶领域模型中,领域的大小由前、后纵向半径与左、右舷长决定,领域形状由另一个参数决定,且这些参数均与船舶的轮廓、船速、操纵性相关,其中领域大小与船速成对数关系.此外,国内其他学者也通过构建与运用船舶领域,展开研究分析[14-18].但这些模型以简单的船舶轮廓为研究对象,仅根据航速按一定线性规律扩大船舶领域,既未考虑航行速度增大后,船首方向安全距离应该随着碰撞风险的增大而增大,船尾方向安全距离应该随着碰撞风险的减小而减小,也未考虑航行方向变化时,非转向侧的安全距离应该随着舵角的增大而减小,未能实现对船舶航行风险的充分描述.
船舶领域构建方法可分为实验数据统计、专家知识和解析表达[19],其中,解析表达可充分考虑船舶运动状态.文中基于解析表达的方法,通过识别船舶航行过程中的安全风险,分析避碰双方的轮廓线、航速、航向等多元因素对航行安全的影响机制,按照避碰紧迫度的不同,提出危险周界和预警周界的解析方法,构建面向海上安全航行的多元避碰周界,验证该多元避碰周界的合理性.在此基础上,进一步开展实例分析,选择具有复杂轮廓的固定海上岛屿和多种航行状态的船舶,考虑多元影响因素,分别计算了危险周界和预警周界,建立了多元避碰周界,揭示不同航行状态的海上物体在参与航运交通过程中的风险程度和安全界限,可作为智能船舶避碰辅助决策、无人船舶智能航行控制的理论参考.
1 多元避碰周界研究
1.1 基于航行状态的船舶避碰场景构建
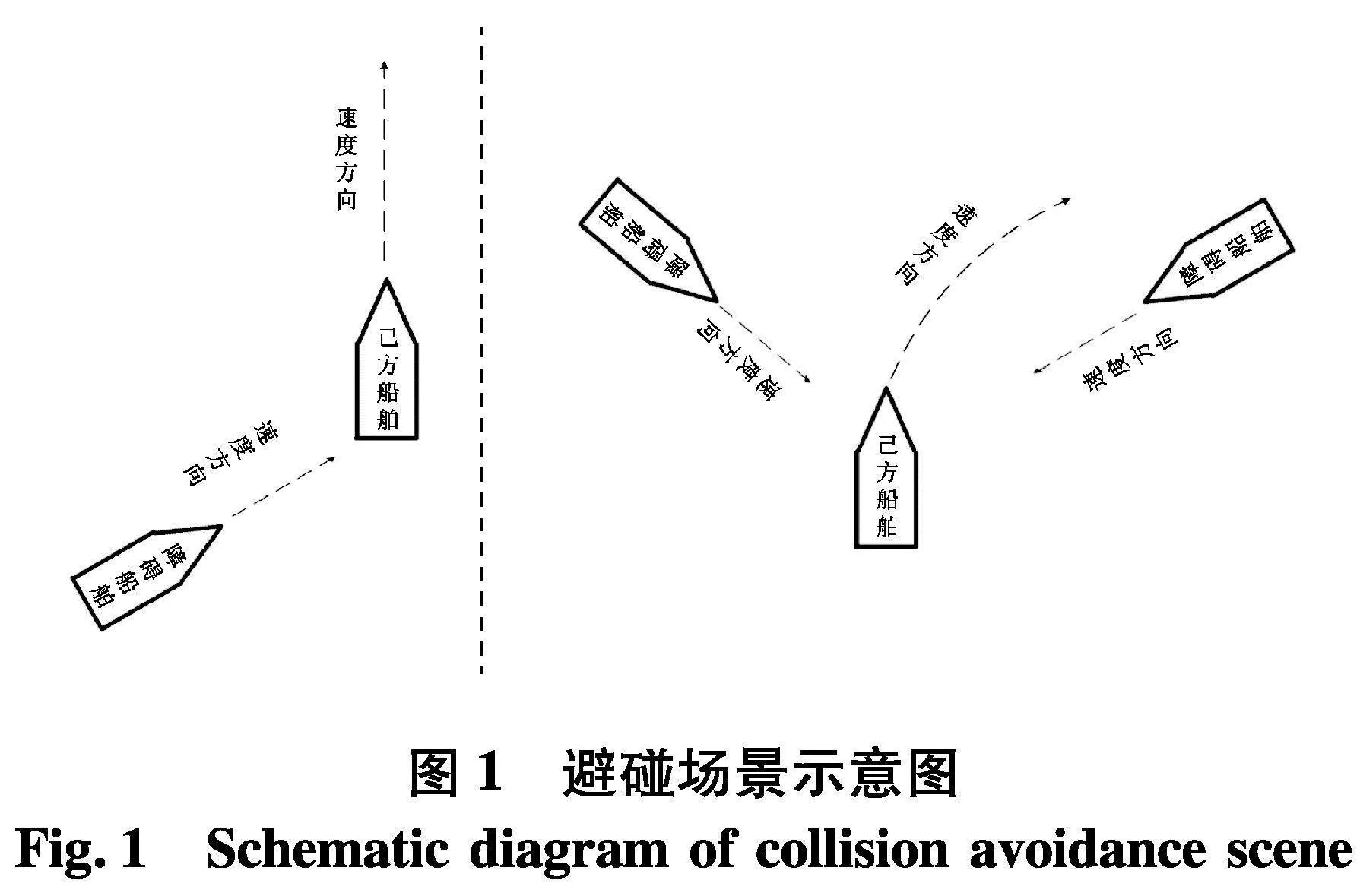
我国海事局公开的船舶碰撞海事调查报告中,碰撞态势为《国际海上避碰规则》[20]中规定的交叉局面的约占26.9%,追越局面的约占4.63%,因此船舶航行过程中,航行方向与其左右侧的安全尤为重要.而现有的研究工作未考虑航向因素,所构建的船舶领域也不具有方向性.因此,多元避碰周界在构建过程中,当速度处于安全航速范围内时,随着速度的增加,船舶领域逐渐向船首方向偏移.且当船舶航向发生变化时,速度变化方向的安全距离增大,其反方向处的安全距离减短,比如船舶左转时,左舷侧安全距离应该增大,右舷侧安全距离应该减小.典型避碰场景如图1.
在被追越的场景中,在障碍船舶速度不变的情况下,随着目标船舶速度的增加,被追越的可能性越来越小,因此船尾发生碰撞的风险减少,其安全距离应该随之减小,而不是随速度而增大.在交叉相遇的场景中,面对左、右舷侧的障碍船舶,在两艘障碍船舶速度不变的情况下,当目标船舶向右转向时,因为与左方障碍船舶碰撞的风险相对右方障碍船舶的风险相对较小,因此船舶左方的安全距离应该按航行方向变化量相应的减少,而不是仅随速度增大而增大.
1.2 船舶碰撞风险分析
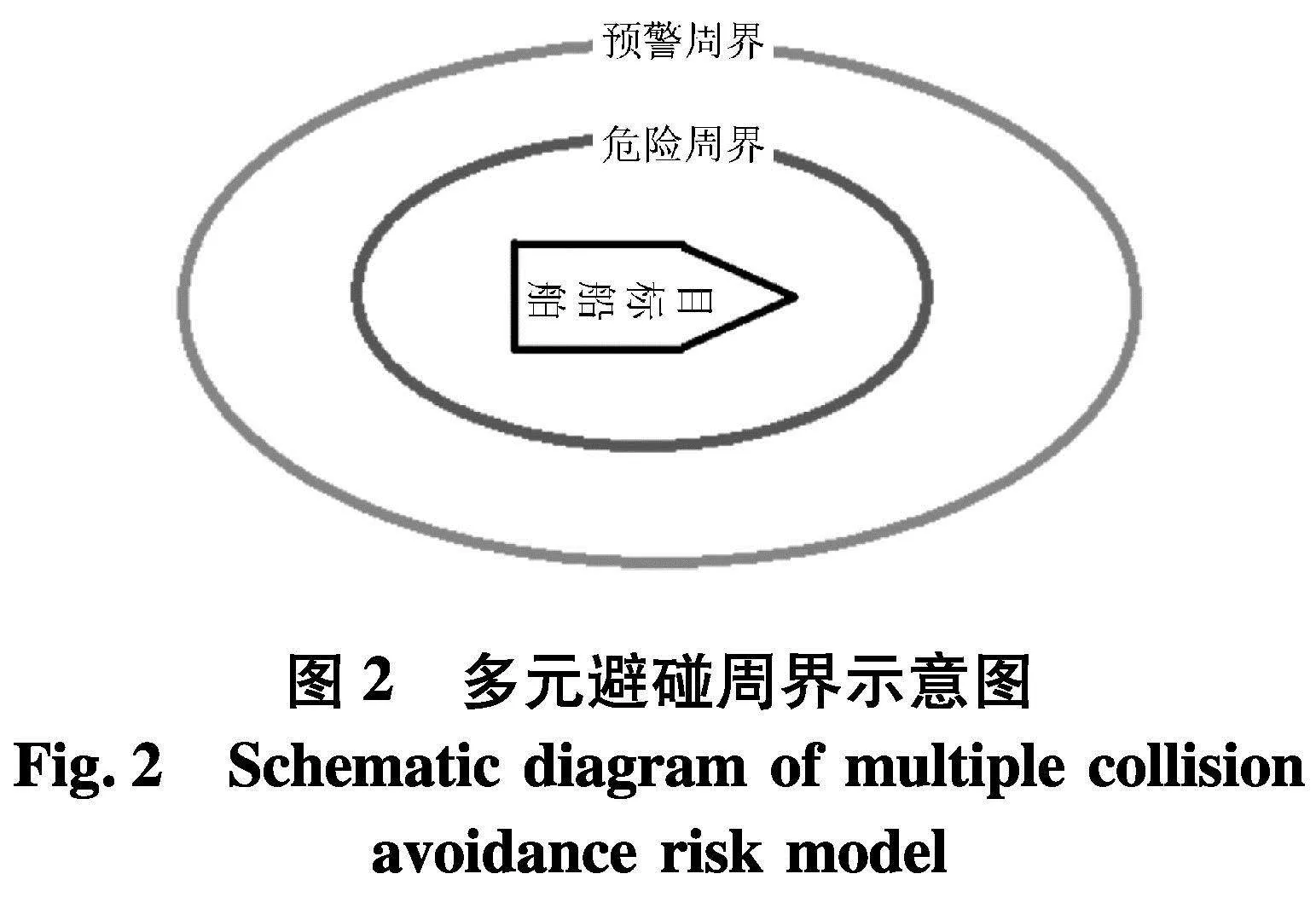
由于船舶航行过程中会遇到不同形状的障碍物,因此为保证双方安全,需要利用目标船舶的主尺度,为避碰双方建立危险周界模型,并根据自身的轮廓、航行速度、航行方向在危险周界模型的基础上构建预警周界模型,如图2.
危险周界模型:对于构建多元避碰周界的物体,根据其自身的轮廓与目标船舶船长所确定的、当目标船舶进入后则认为需要紧急避碰的周界,称为该物体的危险周界模型.
预警周界模型:对于构建多元避碰周界的物体,在其危险周界的基础上,根据其自身的轮廓与航速、航行方向变化量所确定的、当目标船舶进入后则认为需要进行避碰决策的周界,称为该物体的预警周界模型.
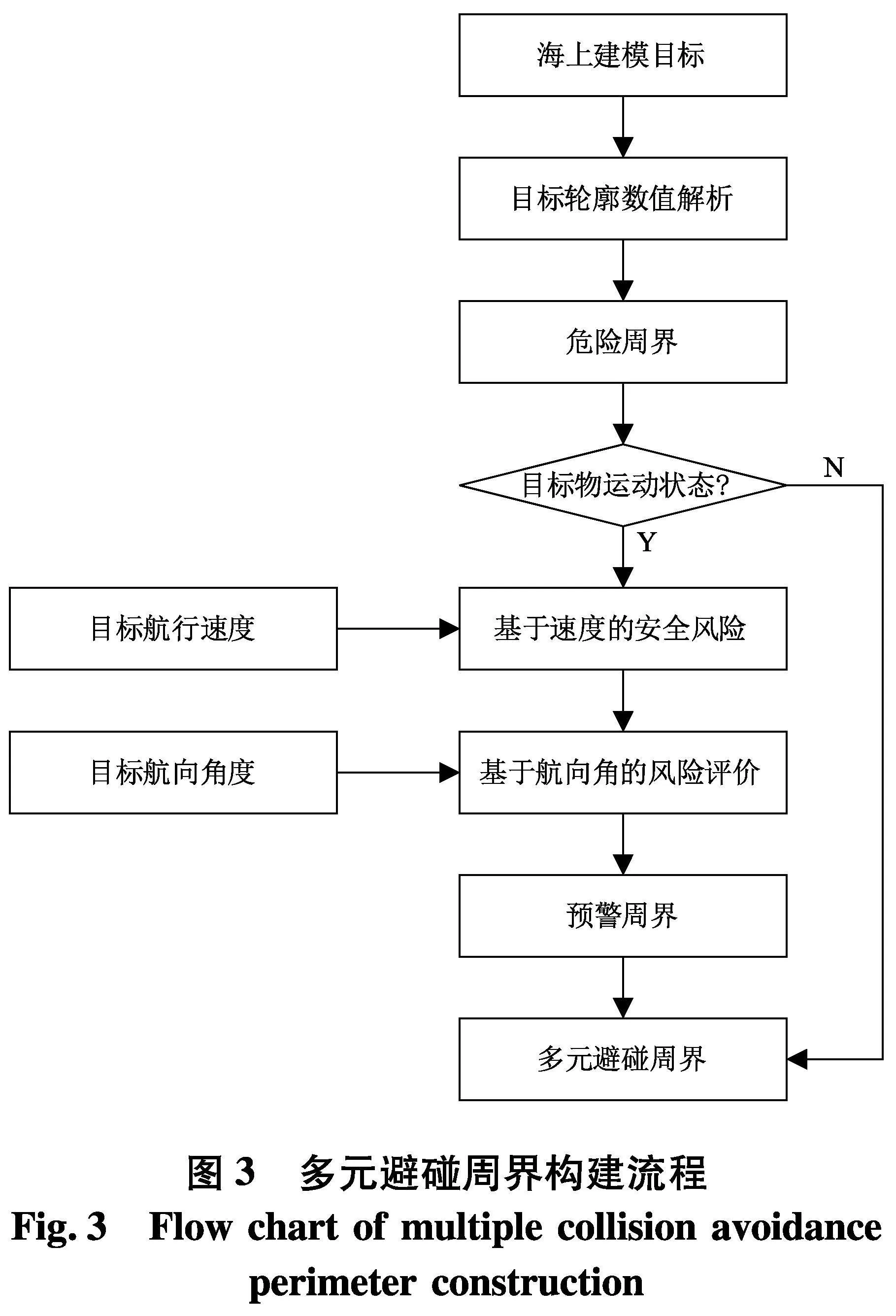
多元避碰周界的构建包括物体类别的判定与周界模型的构建.构建过程中,首先根据该物体的轮廓与目标船舶的船长,构建该物体的危险周界.之后判定该物体是否具有速度特征,如果物体不具备速度属性,则多元避碰周界构建完成,反之就根据自身的轮廓与航速,基于危险周界构建预警周界边界,并根据当前航速与所设定的最小航速、最大航速间的关系,对预警周界边界进行坐标平移.最后再判定该物体接下来的航向是否发生变化,若航向未发生变化,那么多元避碰周界构建完成,反之则通过既定航向,判定转向侧,对非转向侧的预警周界边界进行修正,最后根据物体航向对预警周界边界进行旋转变换,构成该物体的多元避碰周界.
1.3 多元避碰周界
多元避碰周界通过考虑避碰双方的轮廓、航行速度、航行方向变化量,由危险周界模型和预警周界模型两部分构成.
1.3.1 危险周界建模方法
为避免碰撞风险,对于建立多元避碰周界的物体,需要在物体外围先构造一个与避碰双方的其他属性无关,仅由双方轮廓决定的危险周界.当有动态障碍物进入该区域时,则说明该物体处于严重危险状态,需要进行紧急避碰处理.当动态障碍物处于区域外时,则视其是否处于预警周界内,再做处理.由于物体的危险周界是区分该物体是否遭受严重威胁的关键,因此危险周界需要体现出物体的物理尺寸与目标船舶u的轮廓.由于藤井模型没有考虑复杂形状的海上一般障碍物,且藤井模型的长轴为船长的6倍,短轴为船长的1.6倍,范围过大,因此,文中基于藤井模型,通过如下方法建立危险周界.
以物体的型心o1为圆心,把物体外边界离散为含I个点的点列ob1,设ob1(i)(0≤ilt;I)与x轴正方向的夹角θ(i)(0≤ilt;I).设ob1有n个交点的角度为θ(i)(0≤ilt;I),其中距离o1最远为bmax(i)(0≤ilt;I),距离o1最近的点为bmin(i)(0≤ilt;I).先把u的速度v=0代入(2),再把得到的g(v)与u的长度Lu、v=0代入式(1),得Lu1.令bmin(i)中距o1最近的点的距离Lb1,把u的长度Lu1与Lb1、bmin(i)、bmax(i)代入式(4、5).生成危险周界P1.
其中:L为船长,m;v为航速,kn;g1,g2为自定义系数;ob1为物体外边界的离散点列;bmax(i) 与bmin(i)为角度为θ(i)时,距离o1最远、最近的点;Lb1为bmin(i)中距o1最近的点与物体的型心o1间的距离;Lu1为根据u的长度Lu、v=0代入式(1、2),得到的此时物体的安全距离.
当为目标船舶建模时,u为自身,o为目标船舶的形心,ob为自身外轮廓;当为障碍船舶建模时,u为目标船舶,o为障碍船舶的形心,ob为障碍船舶的外轮廓.由于船舶为凸型物体,因此对于目标船舶与障碍船舶,任意角度下bmin和bmax均相等.当为一般海上障碍物建模时,由于o为该物体的形心,ob为该物体的外轮廓,bmin为各角度下,距o最近的点的集合,bmax为各角度下,距o最远的点的集合.
1.3.2 预警周界建模方法
由于危险周界的建立是为了防止物体受到伤害,预警周界主要起风险预报的作用,因此与危险周界侦测到动态障碍物后采取紧急避碰的方法不同,预警周界侦测到动态障碍物后,物体应在考虑风险的前提下尽量不干扰自身运动.
对于建立多元避碰周界的物体,在根据避碰双方的轮廓建立危险周界后,已经具有了一定的风险抵抗能力.由于自身航速的大小决定了反应时间的最大限度,回旋性能与轮廓决定了安全距离,航行方向变化量,即既定航行航向与当前航向的差值,决定了物体预警周界的主要探测方向,因此预警周界的大小不仅和物体的轮廓、运动速度有关,也要与运动方向有关.文献[5]虽然在建立过程中考虑了船长与船速,但没有考虑到航向角变化量对船舶领域的影响,因此,文中基于文献[5]模型,通过如下方法建立预警周界:
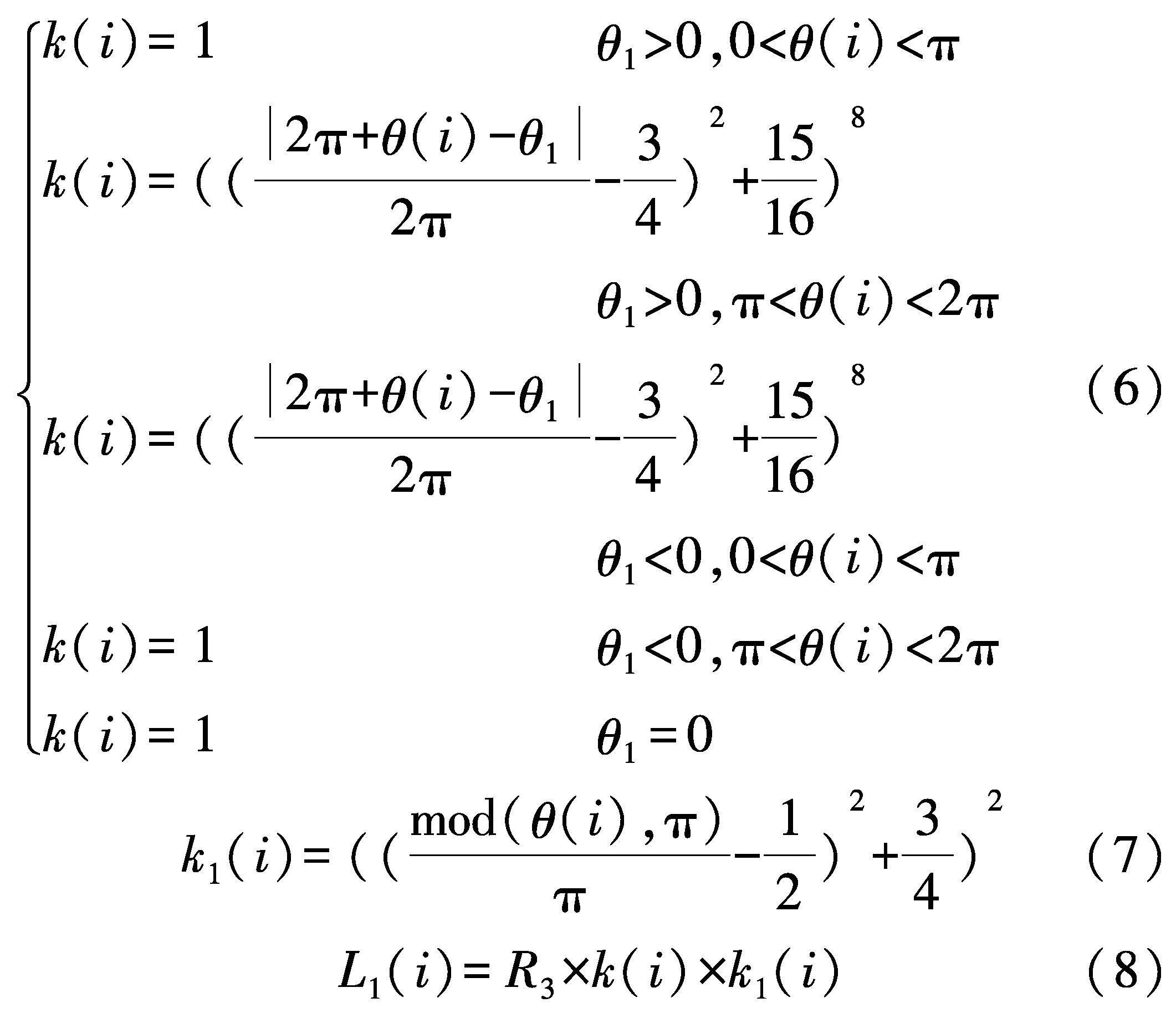
设物体航行过程中的最小运行速度为V1,最大运行速度为V2.该物体当前速度为V3,把V1、V2、V3代入式(1、2),得R1、R2、R3,分别为最小运行速度、当前运行速度与最大运行速度对应的船首侧最大安全距离.当物体转向前进时,设θ1为转向角大小.随着航行速度的增大,转向侧的碰撞风险增大,非转向侧与物体后方的碰撞风险减小.因此采用式(6)得到的k(i)来缩短非转向侧得安全距离.且由于不同极角方向上物体的安全距离不同,因此采用式(7)得到的k1(i)进行安全距离的归一化处理,最后通过式(8)得安全距离L1 (i).
式中:mod为取余函数,返回两个数值表达式作除法运算后的余数;R3为物体当前速度为V3时,物体的最大安全距离.
当物体直行时,随着航行速度的增大,一方面物体前方的碰撞风险增大,另一方面物体后方的碰撞风险减小.当Vlt;V1时,则认为船速过慢,无需对预警周界进行坐标变换.把R1、R2、R3代入式(9、10),根据速度所处的区间,求出船尾侧最大安全距离lr1、船尾侧最小安全距离lr2.对于危险周界P1其中的每一点P1(i)(0≤ilt;I),把θ(i)(0≤ilt;I)、θ1、R3代入式(6、7、8)得L3(i)(0≤ilt;I),以L3 (i)为膨胀值,θ(i)为膨胀方向,以lr1为大小,θ1为方向进行坐标变换,代入式(11),生成船舶在当前速度下的多元避碰周界.
式中:Sx(i)、Sy(i)为预警周界的横、纵坐标.
避碰周界大小是由目标船舶的操纵性能、航速、航向等多种因素共同决定的.首先,对于最影响航行安全性的航速,通过式(1、2、9、10)来求取各个方向上的安全距离.然后,对于影响船舶回转纵距、横距的航向变化,通过式(6、7、8)来求取对避碰周界非转向侧的影响.最后,对于避碰影响较大的船舶回转纵距、横距与航速变化,通过式(4、5、11)来综合考虑,并生成危险周界与预警周界.
当目标船舶航向和航速发生变化时,其危险周界不发生变化,危险周界的大小只与目标船舶自身的长度有关.而预警周界与航向角变化量和航行速度关系密切,当目标船舶进行转向时,非转向侧的安全距离将减小;当目标船舶速度改变时,其各个方向上的安全距离与速度的大小成正比关系.
多元避碰周界的构建流程如图3.
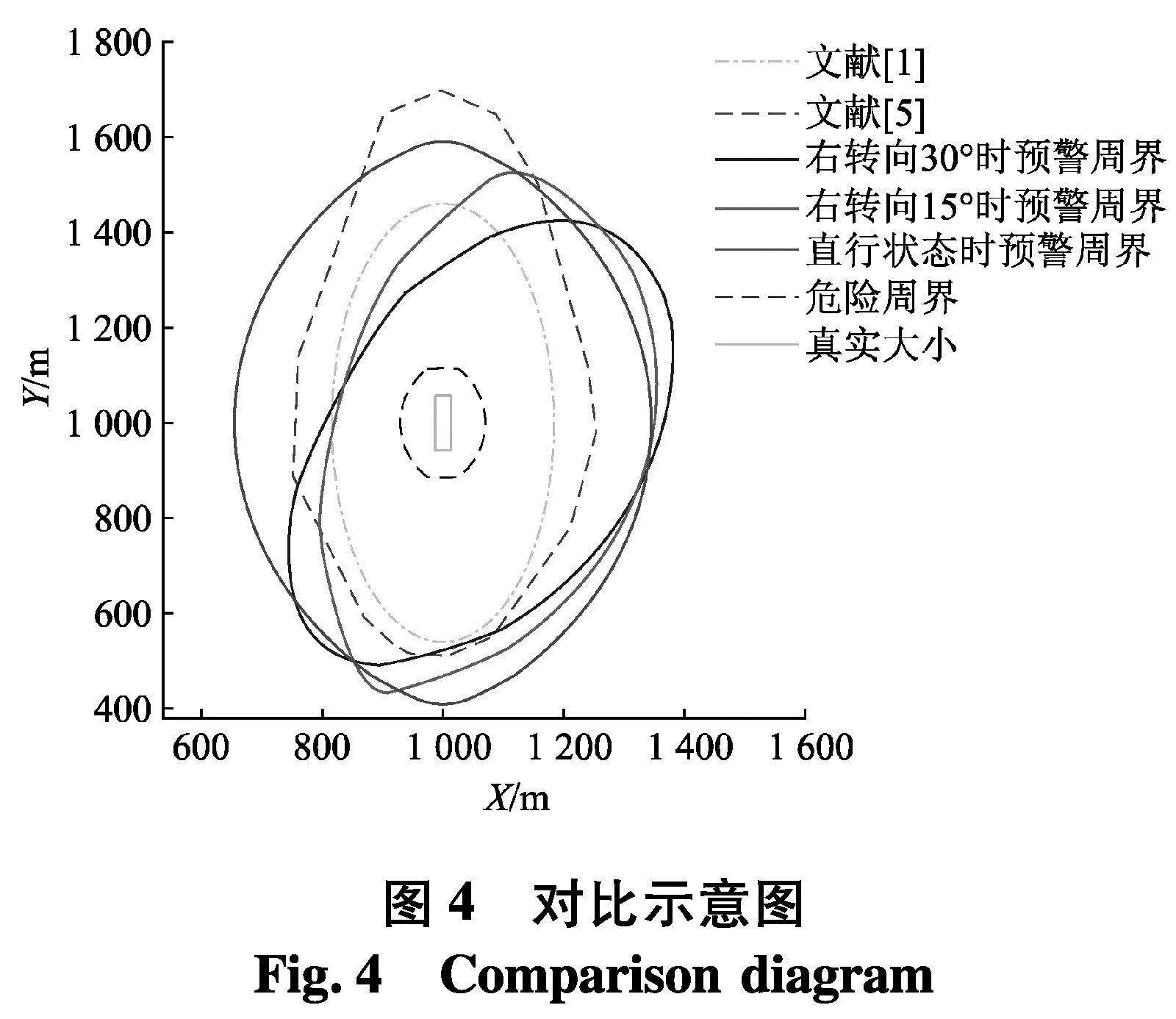
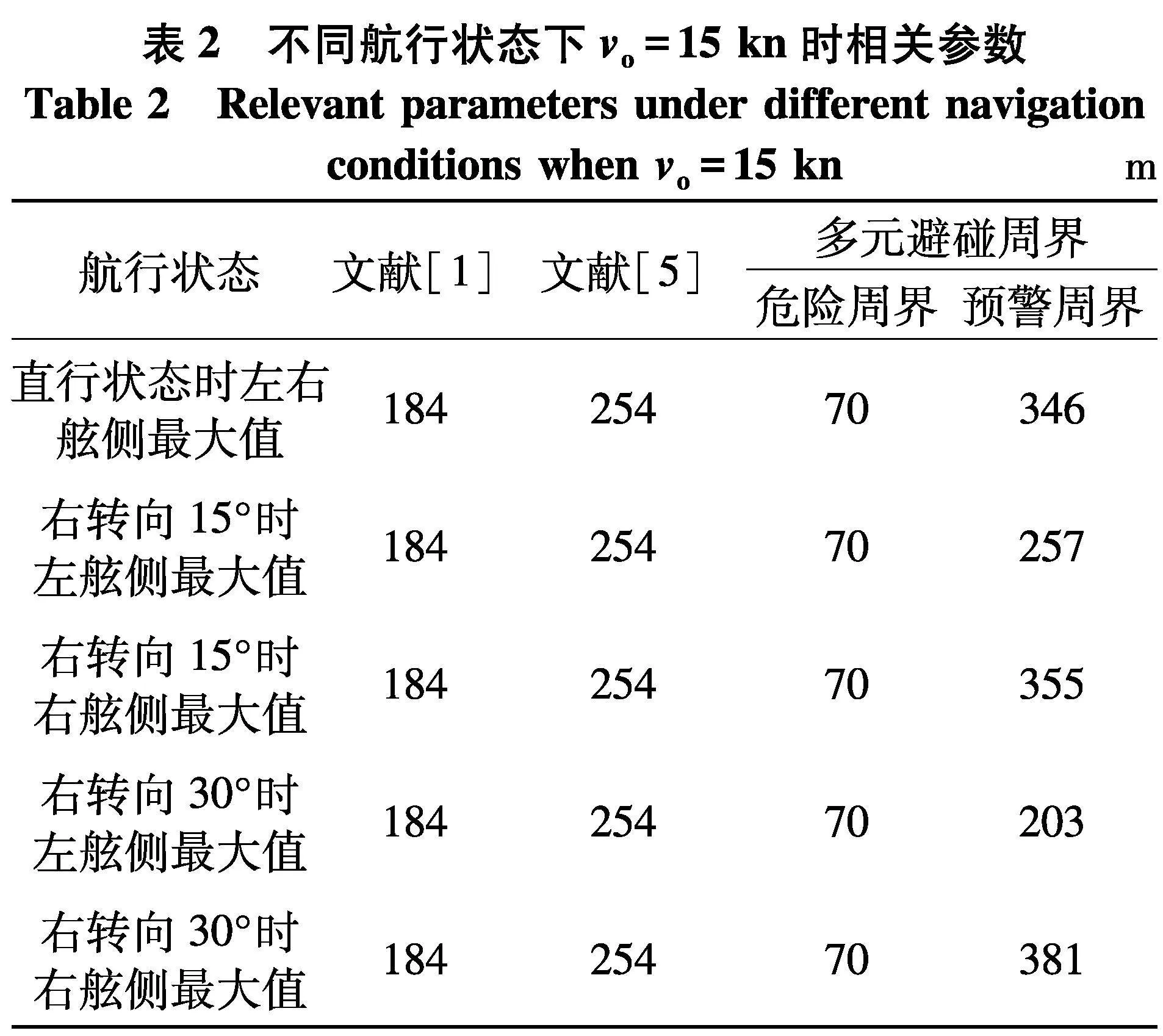
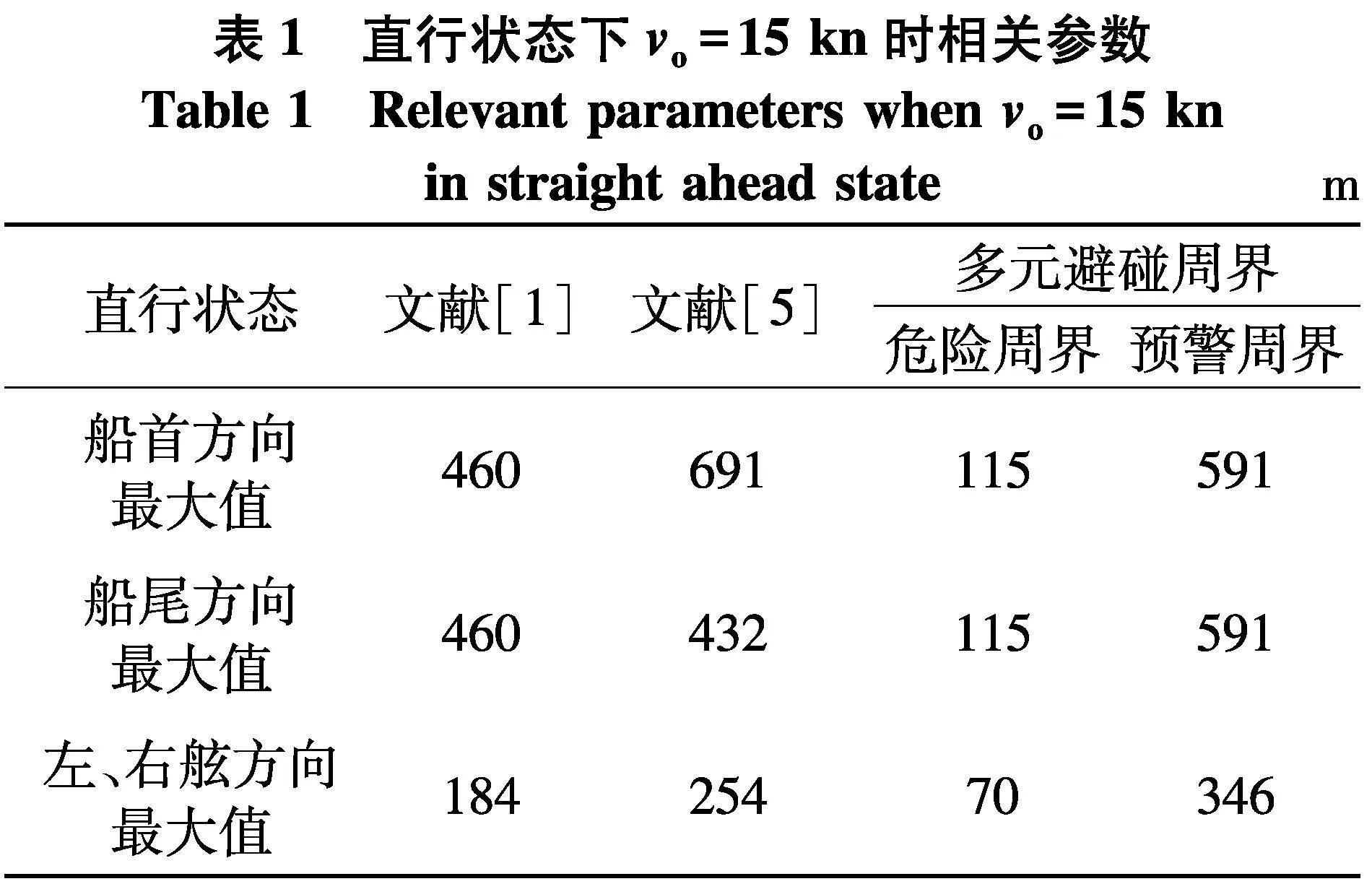
在文中模拟的场景中,与文献[1、5]模型进行比分析.设双方船舶均以船长L为115 m,宽W为26 m,航行时最小运行速度V1=15 kn,最大运行速度V2=30 kn的船为例,此时,相应的R1=488.75 m,R2=1 437.5 m.令目标船舶的速度为vo=15 kn、θ1分别为0、15°、30°.在构建目标船舶的多元避碰周界时,先选取关键的离散点列,以v=0与目标船长L构建目标船舶的危险周界P1,再把P1与相应的vo、θ1分别代入式(6~10),得到目标船舶的预警周界.与文献[1、5]中的模型的对比如图4,部分相关参数如表1、2.
由于文献[1]所构建的船舶领域的大小仅与该船舶自身的船长有关,因此随着速度的增大与航行方向变化量的变化,其所构建的船舶领域没有变化.文献[5]所构建的船舶领域的大小与该船舶自身的船长与船速有关,因此随着速度的增大,其所构建的船舶领域会等比例的膨胀,却不会随航行方向变化量的变化而变化.从图4与表1、2可以得知,与其他船舶领域建模方法相比,在直行状态的相同速度下,多元避碰周界的预警周界对船首的左、右舷侧安全距离随速度变化增大较快,因此船只在发现动态障碍物后有充足的时间进行避碰决策;且随着船舶航行方向变化量的增加,多元避碰周界逐渐向偏航方向偏转,缩短了非转向侧的安全距离,符合实际情况.
2 典型海上障碍物的安全界限描述
在模拟的场景中,设目标船舶均以船长L=115 m,宽W=26 m,航行时最小运行V1=15 kn,最大运行速度V2=30 kn的船为例,此时,相应的R1=488.75 m,R2=1 437.5 m.
2.1 海上固定障碍物的安全界限描述
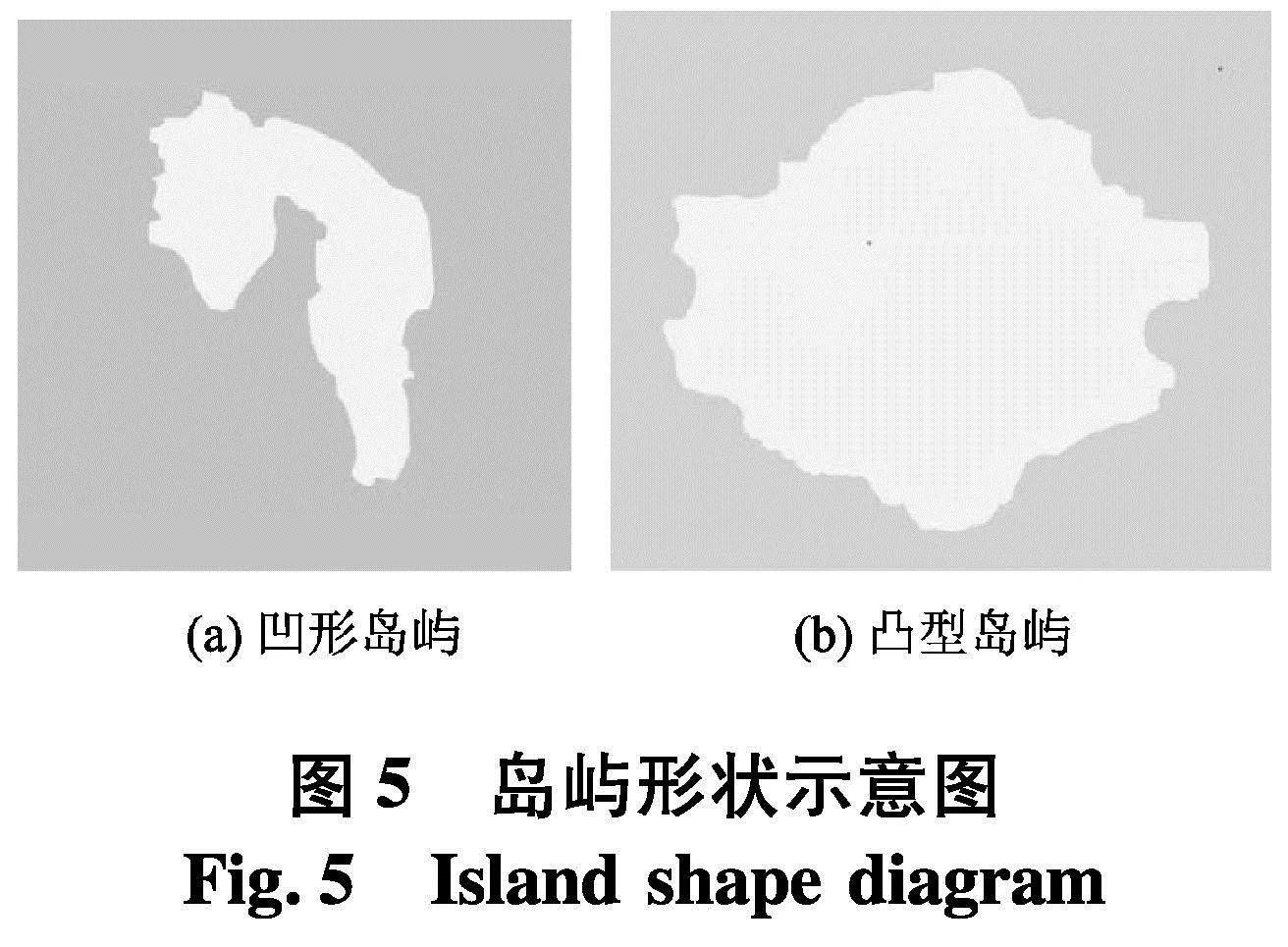
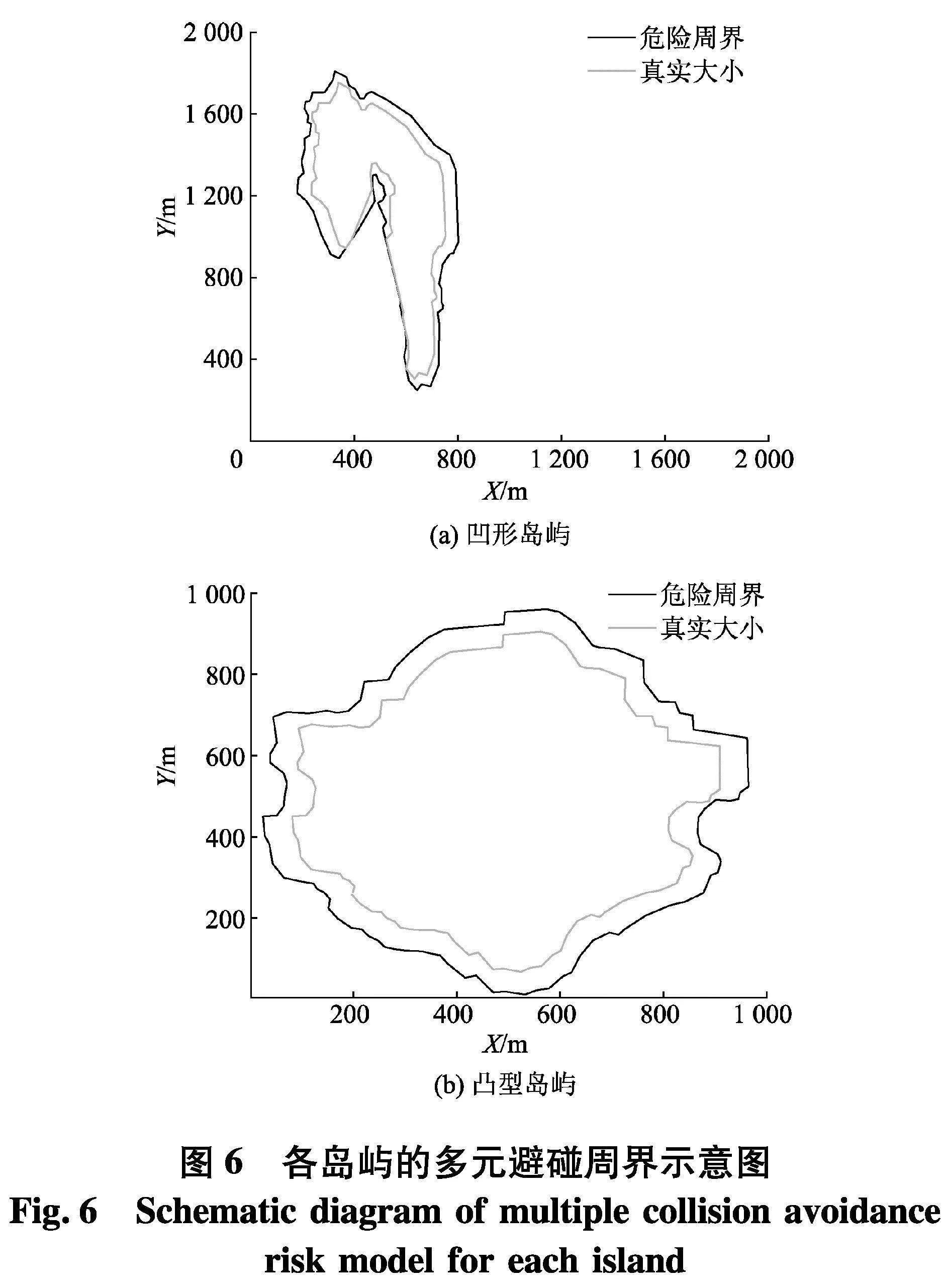
文中将从长江中下游地区与珠江口附近各选取一个复杂轮廓的岛屿为研究对象,描述这些岛屿多元避碰周界的大小.岛屿形状如图5,相应的多元避碰周界如图6.
在构建岛屿的多元避碰周界时,先以v=0与目标船长L代入公式(1、2)得Lu1,然后选取关键的离散点列ob1,如果ob1(i)(0≤ilt;I)中,有多个点与x轴正方向的夹角θ(i)(0≤ilt;I)对应,即该岛屿为凹型.如果ob1(i)(0≤ilt;I)中,只有一个点与x轴正方向的夹角θ(i)(0≤ilt;I)对应,即该岛屿为凸型.最后把ob1、Lu1代入公式(4、5),得到岛屿的危险周界的坐标点信息.由于岛屿等不具备速度,因此其危险周界就是岛屿的多元避碰周界的边界.
如图6,由于岛屿的危险周界由自身的轮廓与目标船舶的船长决定,因此可以有效保障所选物体的安全.从图中可以看出,多元避碰周界也适用于外形轮廓复杂的物体.
2.2 不同航行状态的船舶安全界限描述
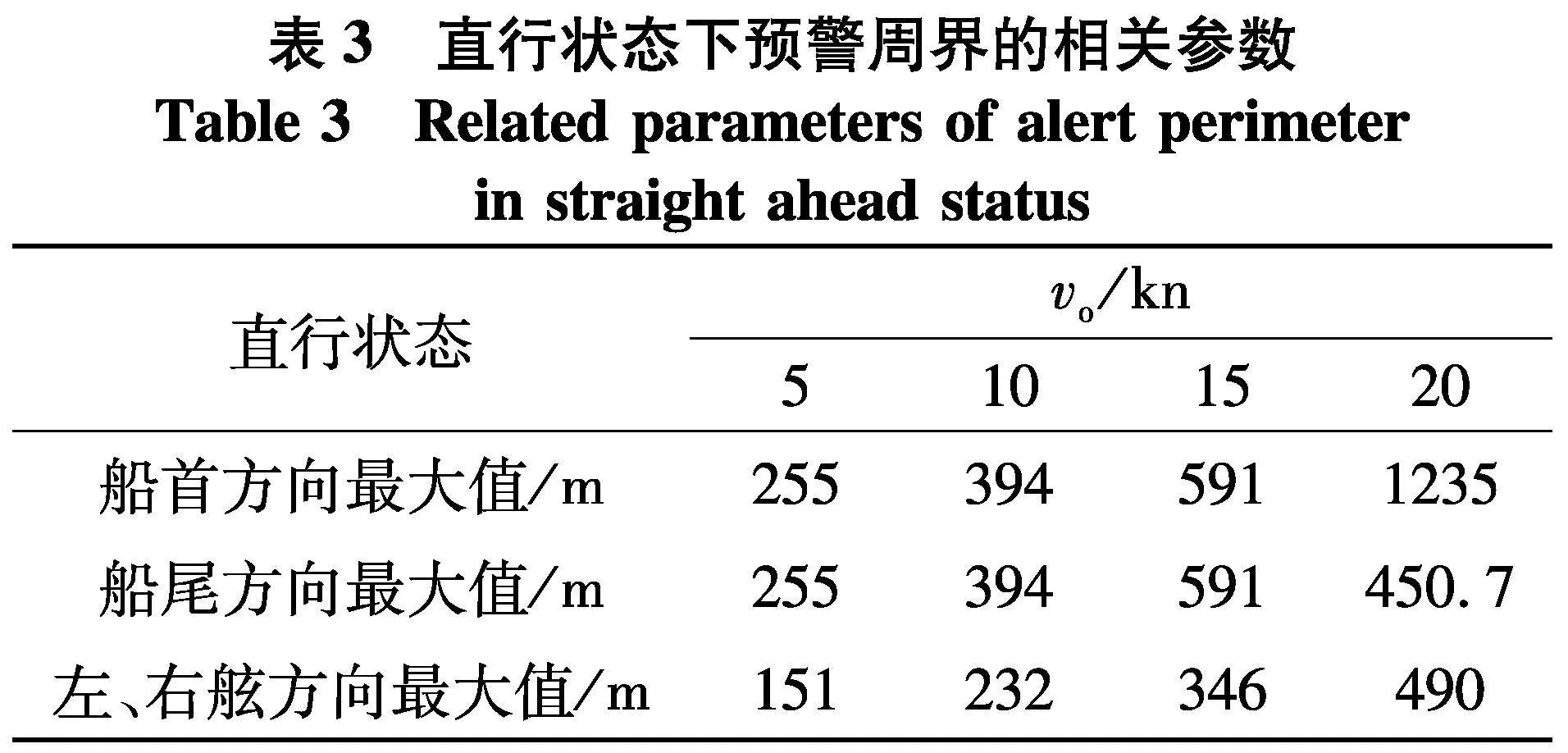
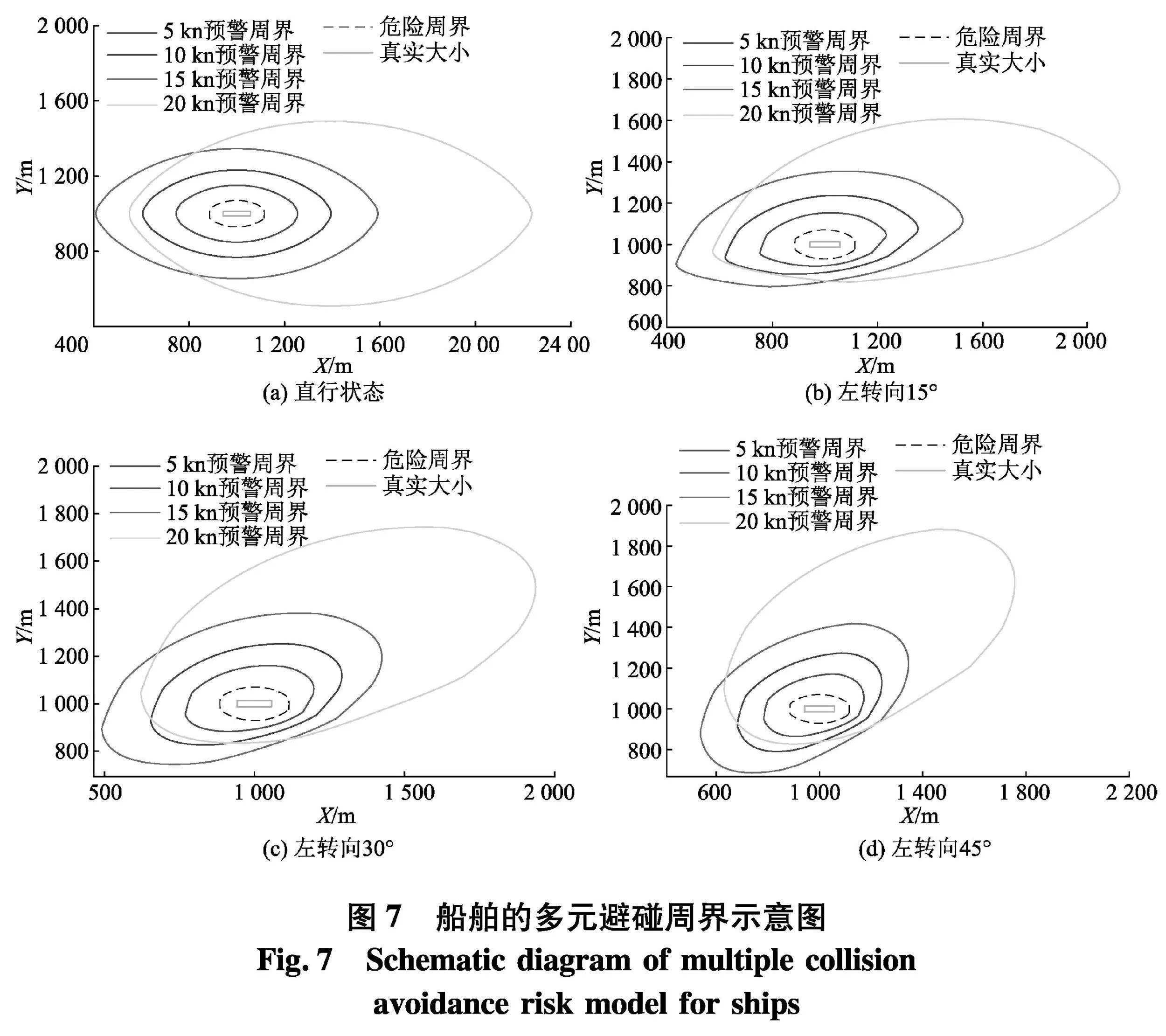
令目标船舶的速度vo分别为5、10、15、20 kn,航行方向变化量θ1分别为0、15°、30°、45°.在构建目标船舶的多元避碰周界时,先选取关键的离散点列,以v=0与目标船长L代入公式(1、2)得Lu1,然后选取关键的离散点列ob1,把ob1、Lu1代入公式(4、5),构建目标船舶的危险周界P1.再把P1与相应的vo、θ1分别代入式(6~11),通过式(6)判断目标船舶是否发生转向,通过式(7)进行安全距离的归一化处理,通过式(8)得到对应θ(i)(0≤ilt;I)方向具体的安全距离,再通过公式(9、10),根据当前设定的最小运行速度、与最大运行速度决定预警周界与目标船舶的坐标关系,最后通过式(11)得到目标船舶的预警周界.相应的多元避碰周界示意图如图7.θ1=0时相关数据如表3.
当船舶处于直行状态时,随着速度的增大,船首前方对船体的威胁性不断增强,船尾方向的威胁渐渐减弱,且此时船舶左、右前方的威胁程度相同,因此当船速大于所设定的最小航速V1时,比如vo=20 kn时,多元避碰周界边界,使得船首侧的安全距离远大于船尾侧的安全距离,且船舶左右舷侧的安全距离相等.而当船速大于所设定的最小航速V1时,比如vo为5、10 kn时,此时航速较慢,可以认为船首与船尾侧受威胁的程度相当,此时多元避碰周界的边界无需进行偏移.且由表3可得,船首与左右舷侧安全距离的增速随速度增大而增大,而船尾方向安全距离呈现先增大后减小的态势,符合实际情况.
当船舶向左转向时,船舶右舷侧与船尾方向的威胁程度随着转角幅度逐渐减小,因此多元避碰周界的边界不仅会随着速度的增加向船首方向偏移,也会随着角度的增加减小非转向侧的安全距离,船舶右舷侧的安全距离就随之减少.
3 结论
(1) 针对海上目标的安全避碰问题,考虑复杂轮廓、不同航速、全角度航向等多元因素,识别海上航行风险,按照避碰紧迫度的不同,提出危险周界和预警周界的解析方法,构建面向海上安全航行的多元避碰周界,采用实例分别模拟了多航行状态的船舶和复杂海上障碍物的数字化安全界限,验证了多元避碰周界的可靠性.
(2) 通过与文献[1、5]模型对比,突出了多元避碰模型对于不同复杂外型海上障碍物的普适性,对于速度与航向变化的敏感性与灵活性.该模型清晰描绘了具有复杂轮廓的海上障碍物的预警周界,直观展示了多元因素对海上航行安全的影响,提出了不同航行状态下船舶安全领域的建模方法,可作为进一步开发智能船舶避碰辅助决策、无人船舶智能航行控制方法的理论参考.
参考文献(References)
[1] FUJII Y, TANAKA K. Traffic capacity[J]. The Journal of Navigation, 1971, 24(4): 543-552.
[2] European Maritime Safety Agency. Annual overview of marine casualties and incidents 2020 [R]. Lisbon,Portugal: European Maritime Safety Agency, 2020.
[3] 贲可荣,王斌.海洋装备智能化与智能化装备思考[J].江苏科技大学学报(自然科学版),2021,35(2):1-11.
[4] 陈伟,芦海,杨雯,等.欠驱动自主水下航行器航迹追踪控制[J].江苏科技大学学报(自然科学版) ,2021,35(3):1-7.
[5] WANG" Y, CHIN H. An empirically-calibrated ship domain as a safety criterion for navigation in confined waters[J]. Journal of Navigation," 2016,69(2): 257-276.
[6] PIETRZYKOWSKI" Z. Ship′s fuzzy domain-a criterion for navigational safety in narrow fairways[J]. Journal of Navigation,2008,61:499-514.
[7] PIETRZYKOWSKI" Z, URIASZ J. The ship domain-a criterion of navigational safety assessment in an open sea area[J]. Journal of Navigation, 2009,62:93-108.
[8] GOODWIN E M. A statistical study of ship domains[J]. Journal of Navigation,1975,28(3): 329-341.
[9] DAVIS P V, DOVE M J, STOCKEL C T. A computer simulation of marine traffic using domains and arenas[J].Journal of Navigation, 1980, 33(2): 215-222.
[10] SZLAPCZYNSKI R, SZLAPCZYNSKA J. Review of ship safety domains: Models and applications[J]. Ocean Engineering,2017,145: 277-289.
[11] RAWSON A, ROGERS" E, FOSTER" D, et al. Practical application of domain analysis: Port of london case study[J]. Journal of Navigation, 2014,67(2):193-209.
[12] HANSEN" M, JENSEN, T, LEHN S" T, et al. Empirical ship domain based on AIS data[J]. Journal of Navigation," 2013, 66(6):931-940.
[13] WANG N. An intelligent spatial collision risk based on the quaternion ship domain [J]. Journal of Navigation,2010,63(4): 733-749.
[14] 刘钊,谢金鹏,张明阳,等.考虑避让紧迫度的数字化船舶领域模型[J].中国航海,2021,44 (2):15-20.
[15] 李丽娜.船舶自动避碰研究中安全会遇距离等要素的确定[J].大连海事大学学报(自然科学版) ,2002 (3) : 23-26.
[16] LIU J, ZHOU F, LI Z, et al. Dynamic ship domain models for capacity analysis of restricted water channels [J]. Journal of Navigation, 2016,69: 481-503.
[17] 陈建华,陈红卫,刘科.基于模糊神经网络的一种船舶碰撞危险度计算方法[J].舰船科学技术,2008,30(2):33-37.
[18] 路泽永.遗传神经网络算法在船舶碰撞危险度确定中的应用[J].舰船科学技术,2016(2): 85-87.
[19] RAFAL S, JOANNA S.Review of ship safety domains: Models and applications[J]. Ocean Engineering, 2017,145(15): 277-289.
[20] 蔡存强.国际海上避碰规则释义[M].北京:人民交通出版社,1995.
