欠驱商船的自主靠泊轨迹规划研究
2024-10-18李永正陈怡白旭张海华杨立许凯玮张茜赵师纬
摘" 要: 针对大型商船在自主靠泊时的轨迹规划任务,分别考虑远码头轨迹规划和码头末端镇定靠泊两部分.基于大型船舶自身特点及限制等多约束分析的分阶段路径规划方法,完成面向大型商船自主靠泊的轨迹规划任务.考虑大型商船自身体型较大,低速运动时船舶的舵效和实船操纵性能差等难题,提出大型船舶自身限制等多约束分析的人工势场法,改进传统人工势场法中存在引力过大、目标不可达的问题.同时考虑镇定阶段船舶自身及泊位信息对船舶艏向和速度的约束,绘制舵角的输出变化曲线,并进行航迹规划,为商船选择合适的航线进行靠泊提供了理论依据.
关键词: 自主靠泊;欠驱;人工势场法;商船
中图分类号:U664.82""" 文献标志码:A""""" 文章编号:1673-4807(2024)01-001-06
DOI:10.20061/j.issn.1673-4807.2024.01.001
收稿日期: 2022-06-09""" 修回日期: 2021-04-29
基金项目: 广东省重点领域研发计划项目(2020B1111500001-04)
作者简介: 李永正(1980—),男,副教授,研究方向为智能船舶.E-mail:justyzli@163.com
引文格式: 李永正,陈怡,白旭,等.欠驱商船的自主靠泊轨迹规划研究[J].江苏科技大学学报(自然科学版),2024,38(1):1-6.DOI:10.20061/j.issn.1673-4807.2024.01.001.
Research on autonomous berthing trajectory planning of underdriven merchant ships
LI Yongzheng1,CHEN Yi1,BAI Xu1,ZHANG Haihua2,YANG Li2,XU Kaiwei2,ZHANG Qian1,ZHAO Shiwei1
(1.School of Naval Architecture and Ocean Engineering, Jiangsu University of Science and Technology, Zhenjiang 212100, China)
(2.Shanghai Branch, China Ship Scientific Research Center, Shanghai 200011, China)
Abstract:Aiming at the trajectory planning task of large-scale commercial ships in autonomous berthing and considering the far terminal trajectory planning stage and stable berthing at the end of the terminal respectively, a phased path planning method based on multi constraint analysis such as the characteristics and limitations of large-scale ships is proposed to complete the trajectory planning task for large-scale commercial ships in autonomous berthing. In view of the large size of large merchant ships and the poor steering efficiency and maneuverability of real ships when moving at low speed, an artificial potential field method based on multi constraint analysis such as large ship's own constraints is proposed to improve the problems of excessive gravity and unreachable target in the traditional artificial potential field method. In addition, considering the constraints of the ship itself and the berth information on the ship heading and speed in the stabilization stage, the output change curve of the rudder angle and the track planning are drawn on this basis, which provides a theoretical basis for the merchant ship to choose the appropriate route for berthing.
Key words:autonomous berthing, underdrive, artificial potential field, merchant ship
全球贸易及经济逐渐朝着一体化方向发展的同时,鉴于海上运输相比较其他运输方式更加经济环保,智能船舶得到了飞快的发展.为了适应世界经济的快速发展,我国船舶越来越自动化、大型化和智能化[1].面对大型船舶本身的种种限制,一般相关人员会借助外部力量来辅助大型船舶的靠泊操纵,然而在没有这些辅助工具的条件下,船舶必须进行自主靠泊.欠驱商船在靠离泊的时候,必须要有效保障其进出港口的操作和避让,尤其是当靠离泊受水域限制的时候[2].大型商船相比较小型船舶,港内自动靠泊控制的难点主要在于:相比较小型无人艇,大型商船体积大,以致惯性大;船舶自主靠泊对最终的姿态和速度有很高的精度要求;船舶自身影响范围较广等.这些难点使大型商船靠泊更加复杂和困难[3].
文献[4]基于MMG分离型数学模型,针对大型船舶在港内低速路径跟踪时舵效及操纵性能差的问题,将航迹控制分为制导、舵角控制和航向控制环节,同时进行了仿真,对大型船舶的自主靠泊的实现提供了参考.文献[5]针对通过无人水面艇搭载的视觉系统采集泊位的场景,提出基于视觉伺服的无人水面艇自主靠泊方法,运用透视投影变换方法,得到泊位目标点相对于船舶的方位和距离,并规划虚拟航线从而引导船舶进行自主靠泊.文献[6]针对船舶自主靠泊控制问题,通过模糊视线法计算出靠泊路径的命令航向角,结合PID控制算法完成船舶的航向控制,从而实现其自主靠泊控制.以上自主靠泊方法各有各的优点,但对大型船舶的研究很少,大多没有考虑大型船舶自身的体型因素及操作性能约束.欠驱船舶的运动控制通常分为镇定控制、路径跟踪控制和轨迹跟踪控制[7],欠驱商船不具备跟踪轨迹的能力,因此在其靠泊的过程中,要考虑欠驱商船自身的约束,以及动态障碍物和泊位信息.1986年首先提出人工势场法,最初是应用在机器人避障领域[8-9].其原理是将船舶在水域面积中的运动转化为其在人为设定的抽象势场中的运动,抽象势场由引力和斥力两大势场组成,合力势场即为两大势场的叠加.船舶在合力势场的作用下航行,航行方向为势能下降的方向.
而船舶可以看作是一个高速行驶的机器人,所以该方法也可应用于船舶的靠离泊路径规划领域[10].但相较于机器人,大型船舶在实际的航行过程中包含诸多约束,如其自身的体型因素及操作性能约束,而传统人工势场法中没有考虑这些.
鉴于欠驱商船自身体型较大,相比较小型无人艇在低速靠泊状态下存在惯性大,操纵性、航向稳定性弱等缺点,同时对靠泊水域有较高的要求,因此融入过渡区域,并对传统人工势场法进行优化,解决了传统人工势场法下的引力过大和目标不可达问题,在此基础上绘制舵角的输出变化曲线,并进行航迹规划,为商船选择合适的航线进行靠泊提供了理论依据.对于在没有拖轮等提供帮助的场景下的欠驱商船顺利靠泊提供了参考.
对欠驱商船运动控制进行研究也可以保障船舶航行的安全.因为当驱动设备突然失效,全驱控制的船舶瞬间变为欠驱时,可启用欠驱控制装置,进而提高船舶的安全性[11].
1" 船舶运动数学模型
目前,船舶操纵运动有两个主要的数学模型[12]:一是整体式模型,二是分离式模型.鉴于整体式模型的运动方程系数多且物理意义不明确,而MMG模型分别考虑船、桨、舵的受力,更有利于对它们进行单独优化设计,降低了求解难度,因此此处选用MMG模型来对欠驱商船进行研究.
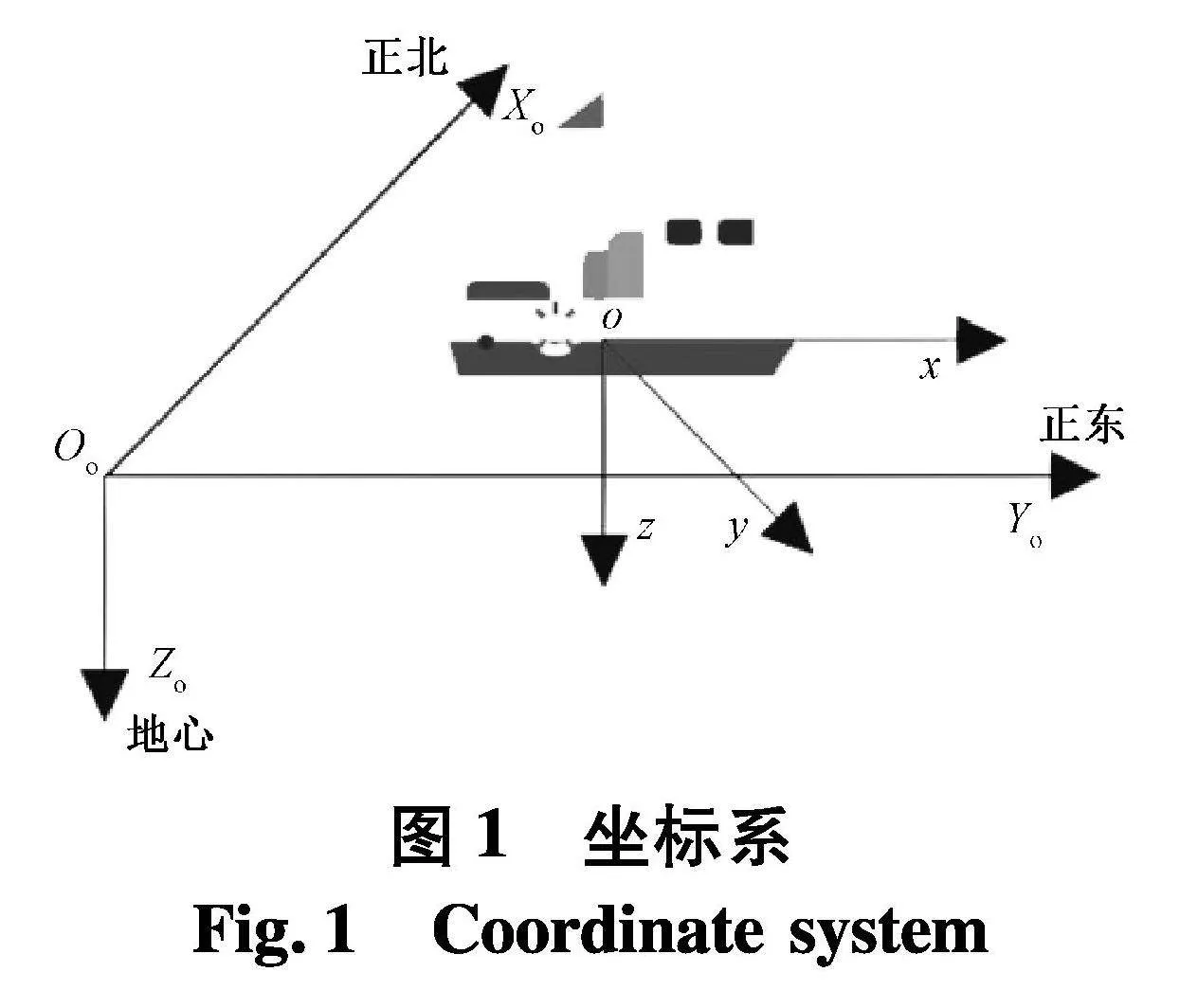
为了对欠驱商船的运动特性进行准确的研究,需要选取合适的坐标系.采用随动坐标系和惯性坐标系[13](大地参考坐标系),如图1.
船舶的实际运动是一种具有6个自由度的运动.六自由度下船舶的运动变量符号如表1.
鉴于文中在对欠驱商船建模时,从研究的重点出发,仅分析商船在同一水平面航行过程中的自主靠泊、避碰和轨迹跟踪等问题,即只包含水平面三自由度的运动,因此忽略垂荡运动、横摇和纵摇运动,采用仅考虑纵荡、横荡和首摇横摇运动的数学模型[14].
三自由度下分离式模型的运动表达式为:
η·=J(ψ)ν
Mν·+C(ν)ν+D(ν)ν=τ(1)
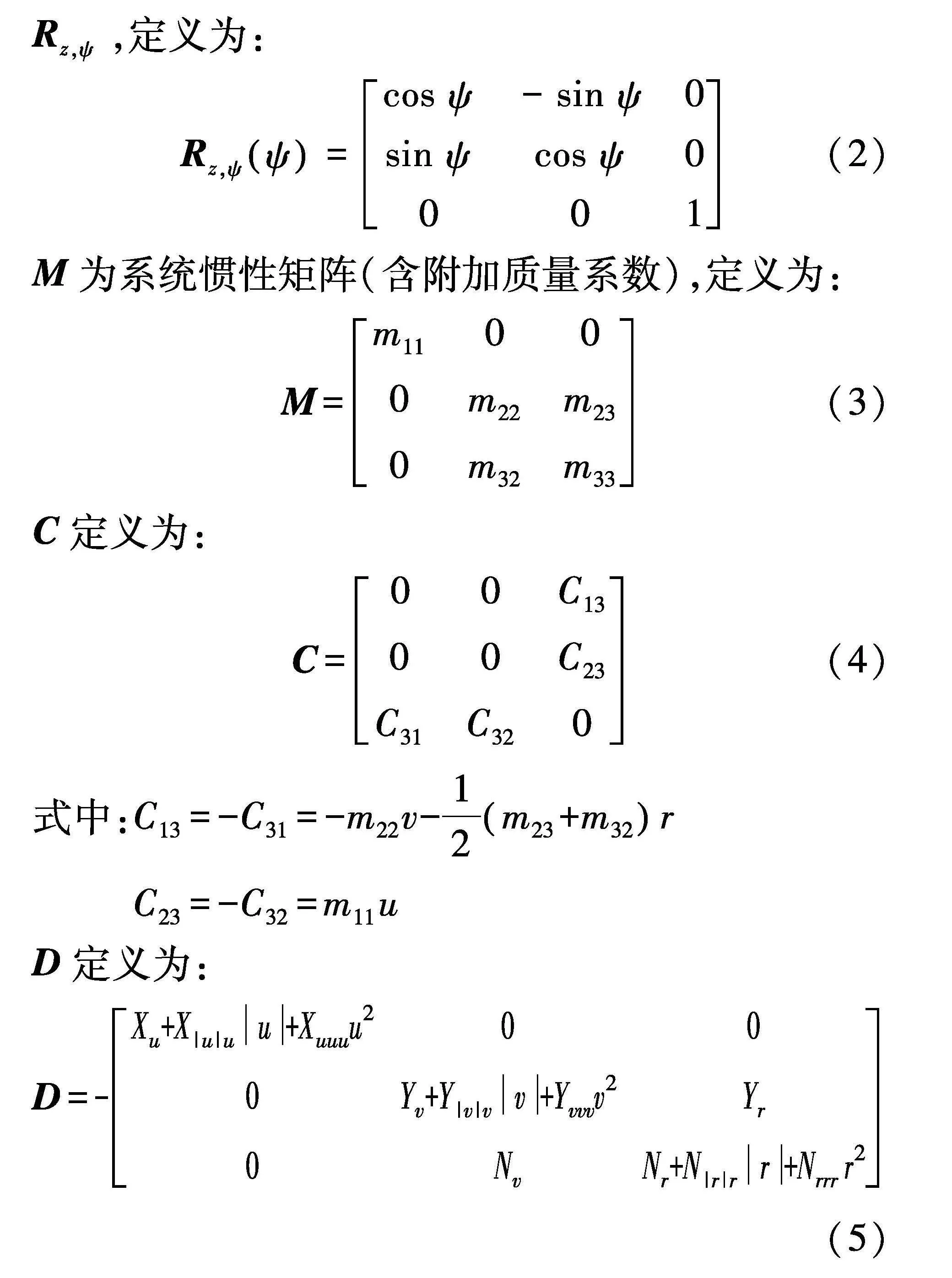
式中:转换矩阵J(ψ)为艏摇方向的旋转矩阵Rz,ψ,定义为:
Rz,ψψ=cos ψ-sin ψ0sin ψcos ψ0001(2)
M为系统惯性矩阵(含附加质量系数),定义为:
M=m11000m22m230m32m33(3)
C定义为:
C=00C1300C23C31C320(4)
式中:C13=-C31=-m22v-12m23+m32r
C23=-C32=m11u
D定义为:
D=-Xu+X|u|uu+Xuuuu2000Yv+Y|v|vv+Yvvvv2Yr0NvNr+N|r|rr+Nrrr r2(5)
2" 面向欠驱商船自主靠泊的远码头轨迹规划方法
针对欠驱商船在自主靠泊时的轨迹规划任务,分别考虑远码头轨迹规划阶段和码头末端镇定靠泊两阶段.远码头轨迹规划阶段主要运动范围集中在抵泊区外,码头末端镇定靠泊阶段主要运动范围集中在抵泊区内,指船舶从泊位前沿水域向码头靠拢的运动过程[15].
远码头轨迹规划阶段为船舶从制动开始到抵达过渡区域的运动过程,其主要运动范围在抵泊区外.
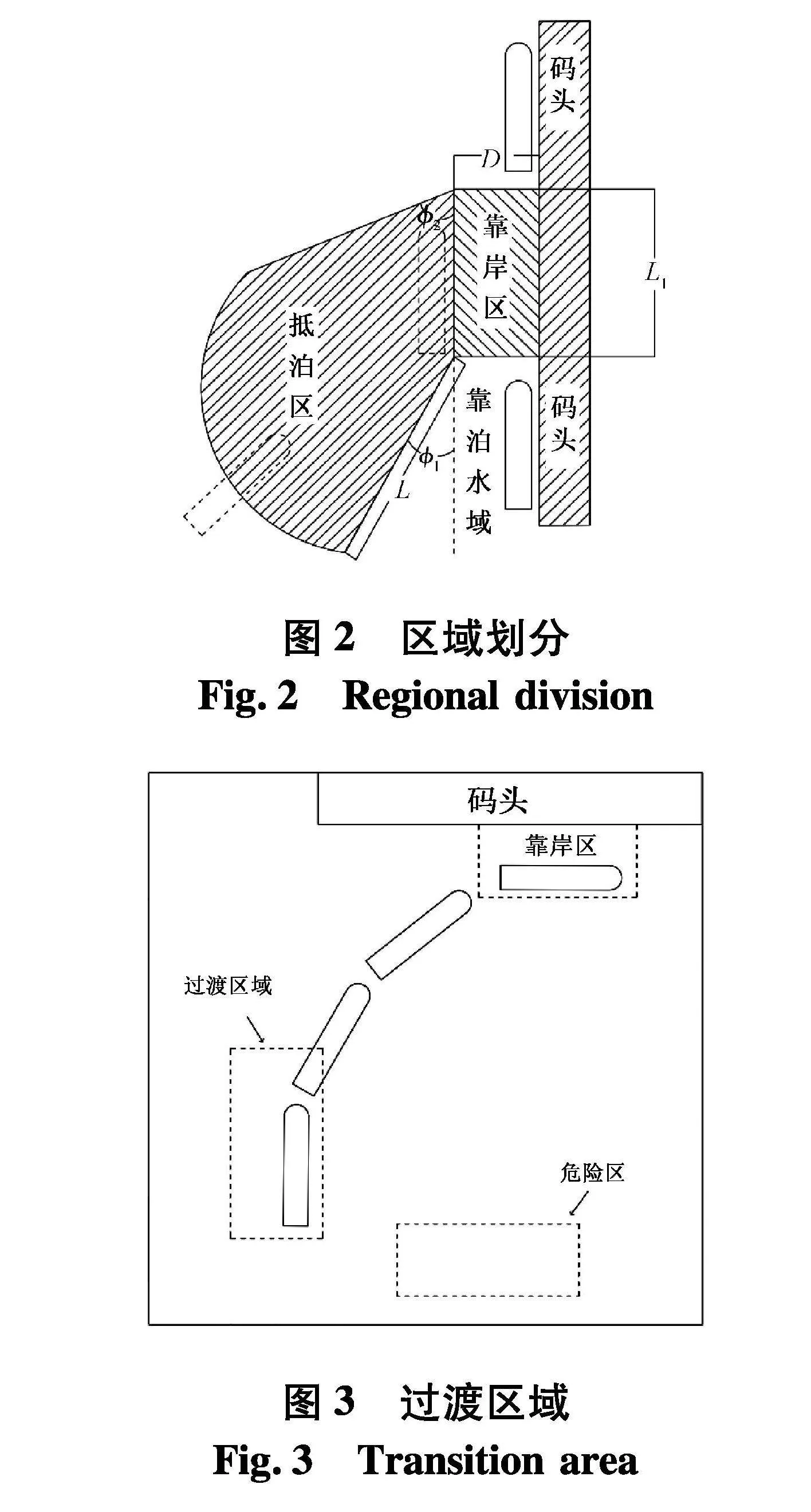
抵泊区是一个扇形区域,根据靠岸时船头的朝向不同,所对应的抵泊区的范围也不同,船舶可由图中所示的多个方向接近过渡区域,抵泊区域的大小可由距离 L以及角度进行确定:距离L可取3~5倍船长,角度1可取15°~30°,角度2可取60°~75°.L1和D分别为靠岸区的长度和宽度.图2为区域划分.
船舶在进行自主靠离泊时,为了保证船舶的安全,通常需要与最终靠泊点保持一定的航向角.大型商船的质量比其他小型无人艇质量大,因此在靠泊作业时速度会大大减慢.过渡区域在抵泊区内.该区域指根据船舶自身状况、码头信息等划分的的一个区域.图3为船舶靠泊时船艏向右的情况.
文献[16]认为当航速在一定极限以下时,考虑船舶的转弯特性以及较大的惯性矩,靠泊操作需要足够大的水域面积来完成.研究者通过数值模拟实验发现,船舶驶向靠泊点之前,一般都先经过一个过渡区域,此区域即为安全靠泊区域.但若船舶从其他区域,如危险区由于船舶需要足够的水域面积来转向,并以低速保持航向角驶向泊位,因此无法直接进行靠泊操纵,需提前操纵船舶将其引导至过渡区域.
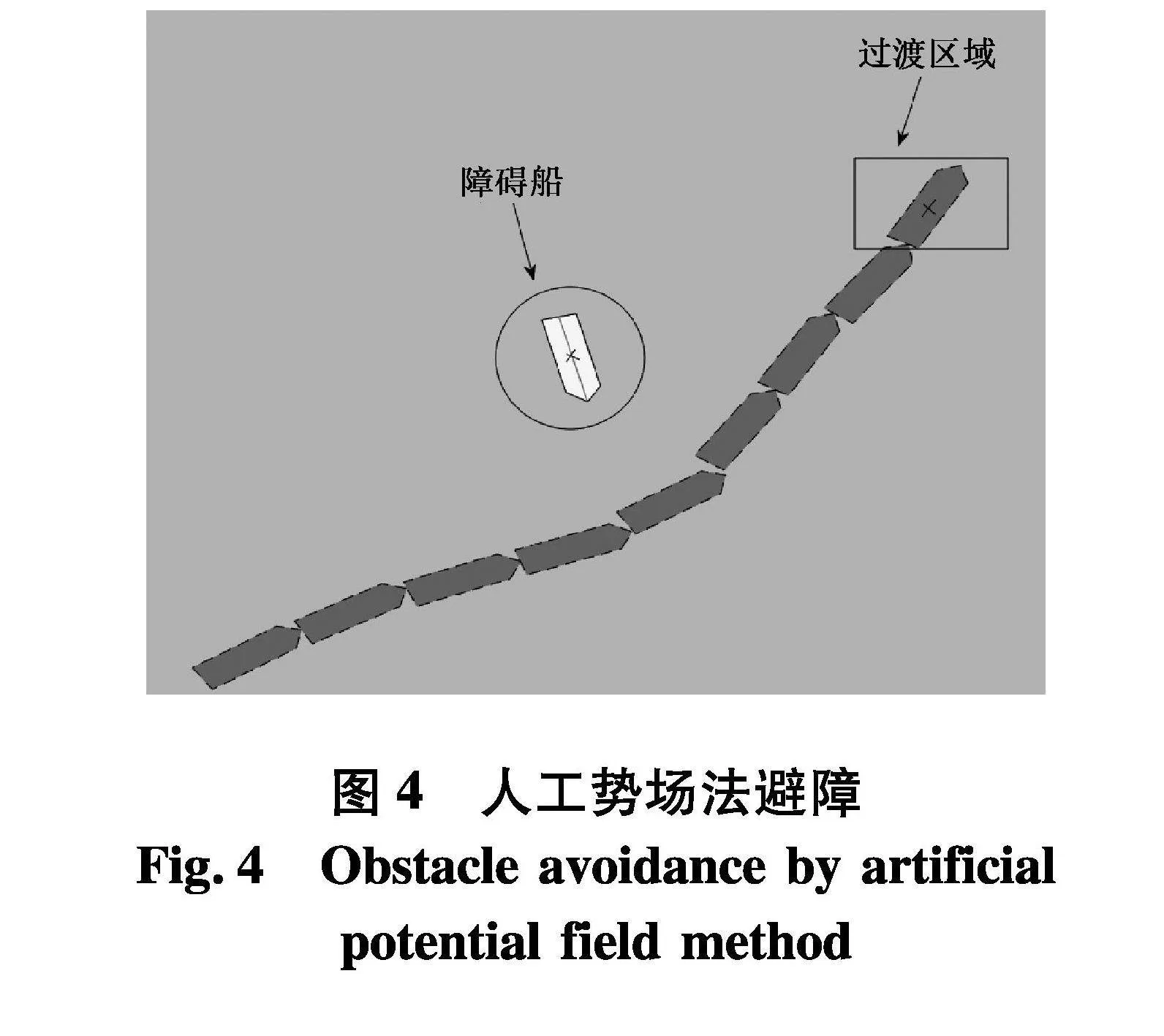
这一阶段面临的主要问题是有效避开影响船舶直接驶向过渡位置的障碍物,从而规划出可行轨迹到达设定好的过渡区域,如图4.
该阶段面临的问题有两种:① 由于欠驱商船体型较大,障碍影响距离较广.当船舶离过渡区域较远时,会产生较大引力.相比较而言,较小的斥力对船舶产生的影响很微弱,以致船舶在驶向泊位目标点时会碰到障碍船;② 当过渡区域附近有障碍船时,近距离使得障碍船对本船产生较大斥力,而泊位目标点对其的引力相对较小,以致很难到达过渡区域.为解决以上这两个问题,文中对传统人工势场法进行优化.
2.1" 引力过大问题
对于欠驱商船体型较大,障碍影响距离较广.因引力过大可能会碰到障碍船的问题,可以通过修正引力函数来解决.
传统引力函数为:
Uatt(q)=12ξρ2(q,qgoal)(6)
式中:ξ为尺度因子;ρ(q,qgoal)为物体当前状态与目标的距离.
对引力函数进行优化.当ρ(q,qgoal)≤d*goal时,引力函数为:
Uatt(q)=12ξρ2(q,qgoal)(7)
当ρ(q,qgoal)gt;d*goal时,引力函数为:
Uatt(q)=d*goalξρ(q,qgoal)-12ξ(d*goal)2(8)
与式(6)相比,式(7,8)增加了范围限定d*goal,避免由于离过渡区域太远导致引力过大.
2.2" 目标不可达问题
鉴于过渡区域附近有障碍物,产生的斥力场过大,导致船舶无法靠近目标点,因此对斥力函数进行优化.
传统斥力函数为:
Urep(q)=12η1ρ(q,qobs)-1ρ02ρ(q,qobs)≤ρ00ρ(q,qobs)gt;ρ0(9)
式中:η为尺度因子;ρ(q,qobs)为物体当前状态与障碍物的距离;ρ0为障碍物的影响半径.
对斥力函数进行优化.当ρ(q,qobs)≤ρ0时,斥力函数为:
Urep(q)=12η(1ρ(q,qobs)-1ρ0)2ρn(q,qgoal)(10)
当ρ(q,qobs)gt;ρ0时,斥力函数为0.
在原有斥力场的基础上进行优化,增添了目标和船舶距离对斥力的影响ρn(q,qgoal).当船舶靠近过渡区域时,虽然周围的障碍物对其产生的斥力场增大,但两者距离在缩短,所以起到对斥力场的削弱作用.
2.3" 仿真结果对比
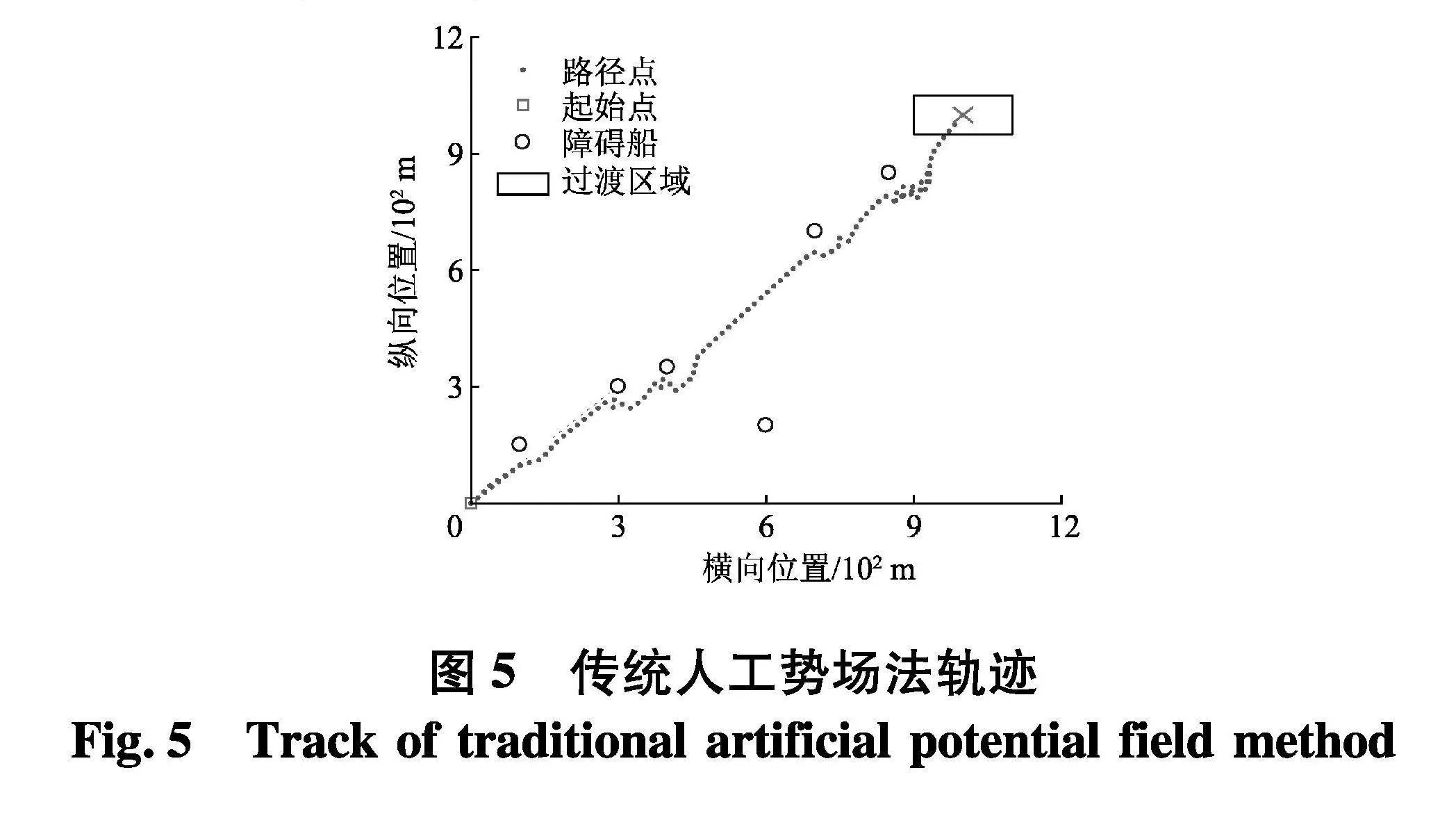
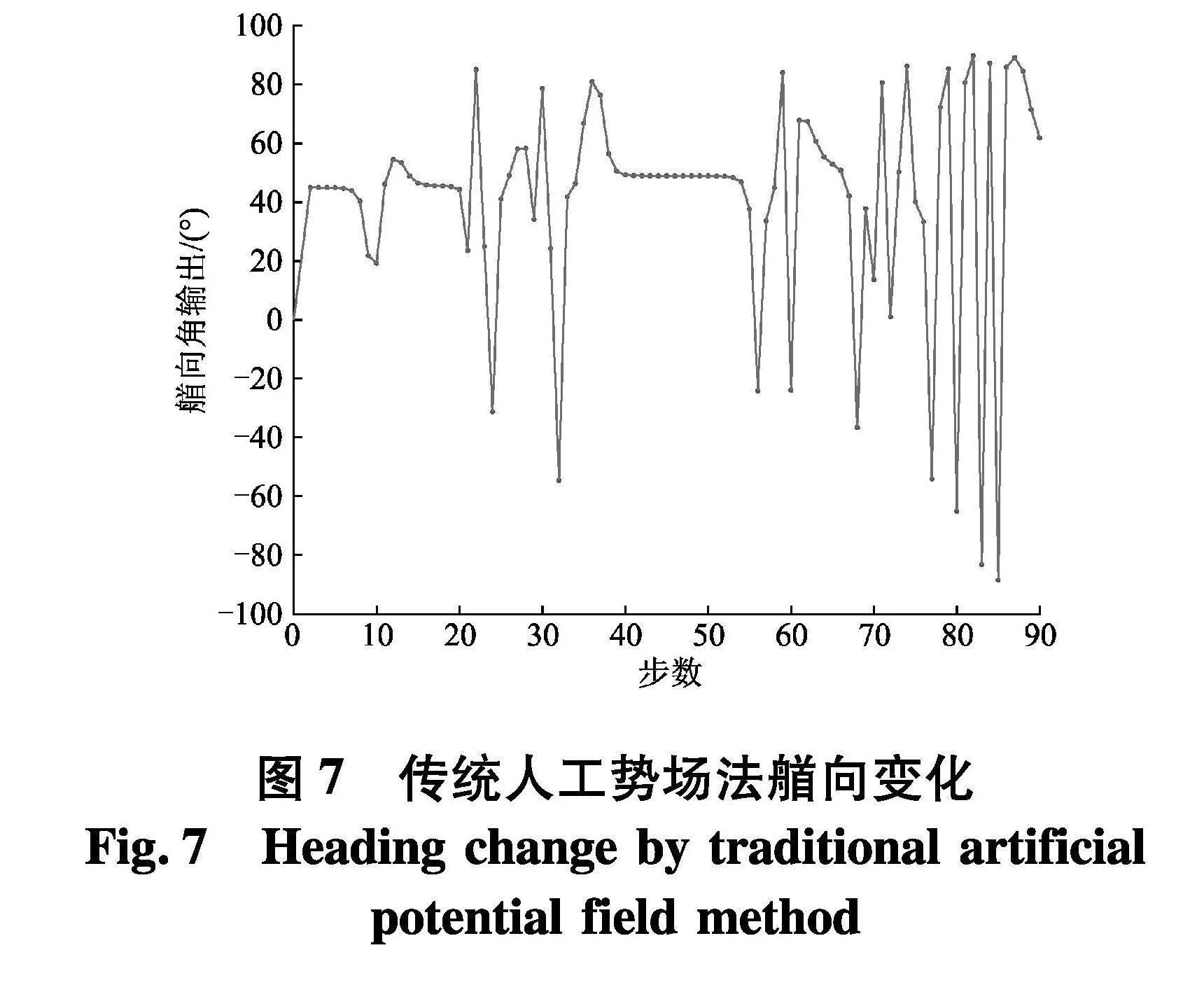
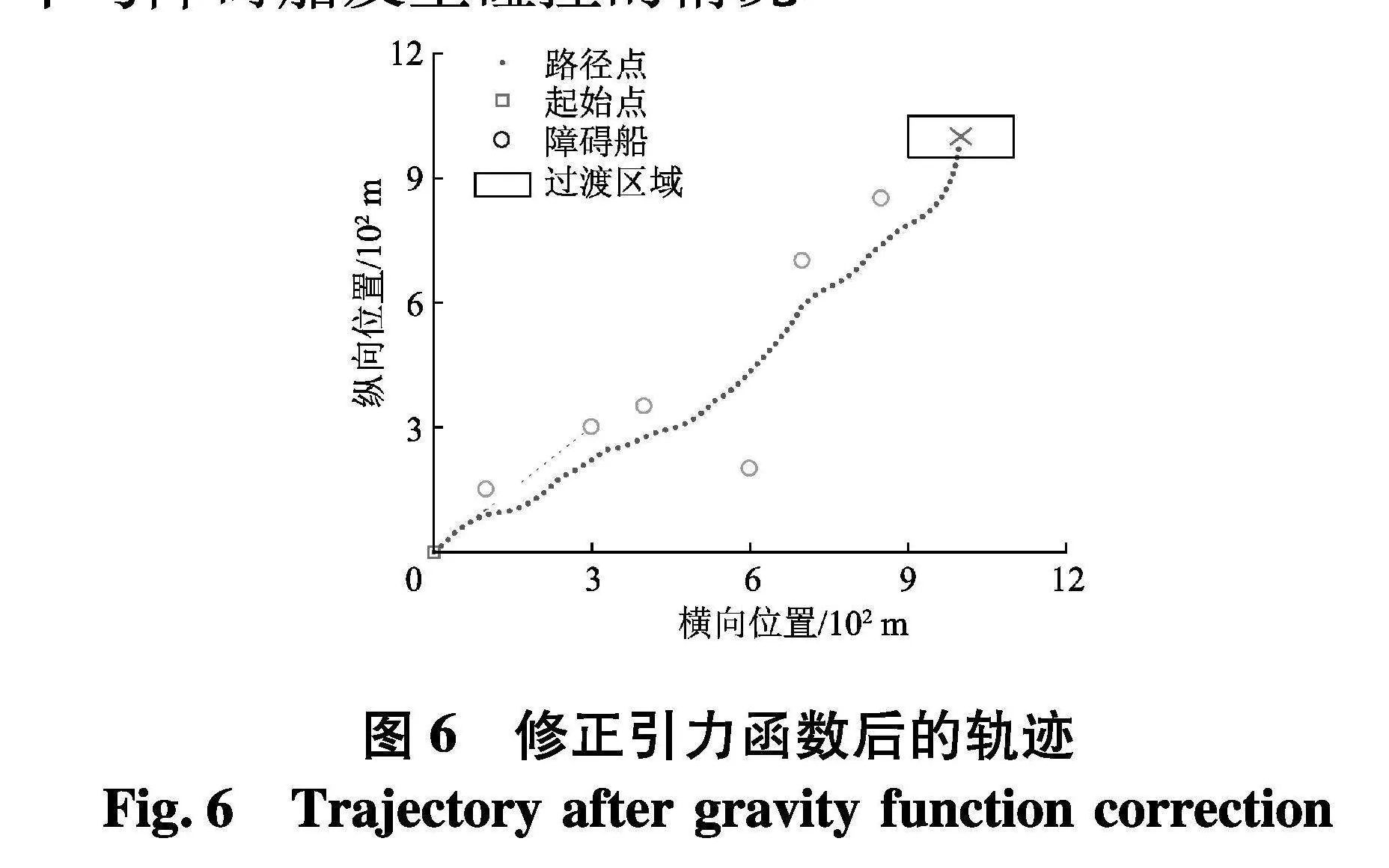
(1) 引力过大问题.从图5可知,当船舶离过渡区域比较远时,会产生较大引力.相比较而言,较小的斥力对船舶产生的影响很微弱.由于商船体型较大,影响半径较广,船舶在路径上离障碍船过近,可能会与障碍船发生碰撞.
通过修正引力函数,增加了范围限定d*goal,当目标区域过远时,减弱一部分引力对船舶的影响,仿真结果如图6.优化后的引力函数,轨迹平滑,不存在较大弯角,且离障碍船足够距离.避免了由于离过渡区域太远导致引力过大,而在航行过程中与障碍船发生碰撞的情况.
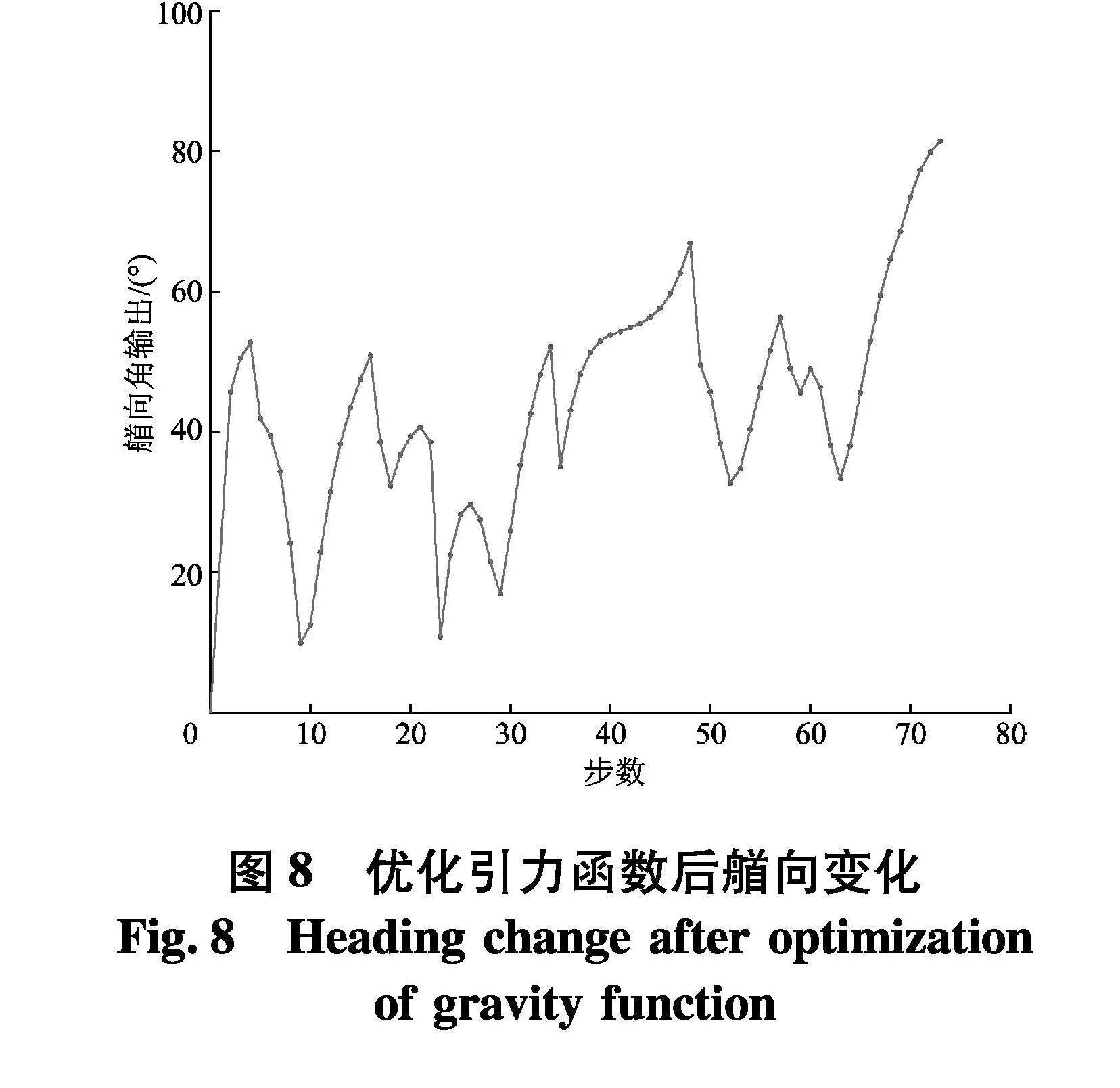
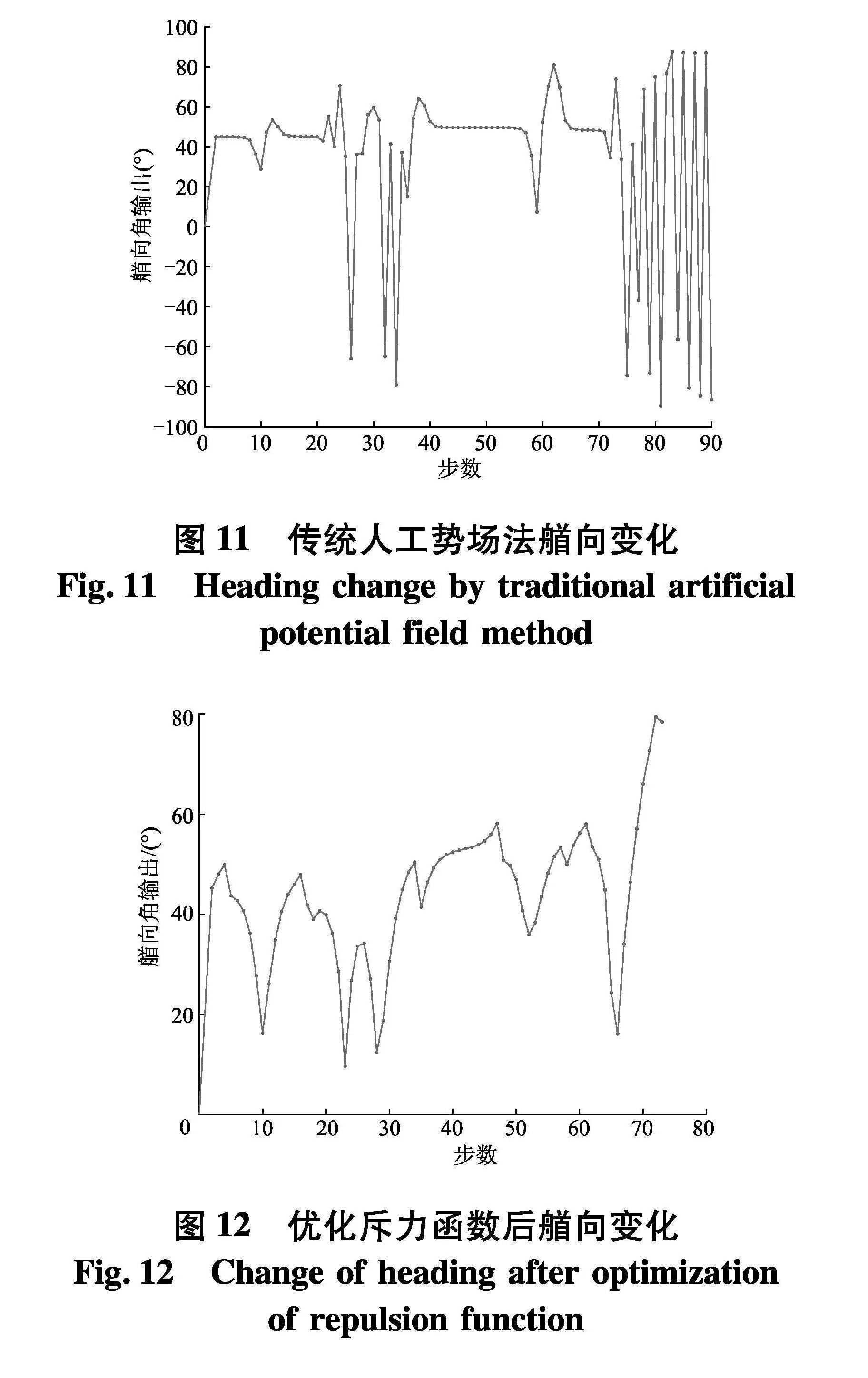
图7中传统人工势场法下的艏向角变化明显,存在较大弯角,不利于轨迹追踪.而改进优化引力函数后的人工势场法避免了出现较大拐角的情况,如图8,艏向输出平缓,更有利于欠驱商船的艏向控制,提高了船舶的跟踪控制性能.
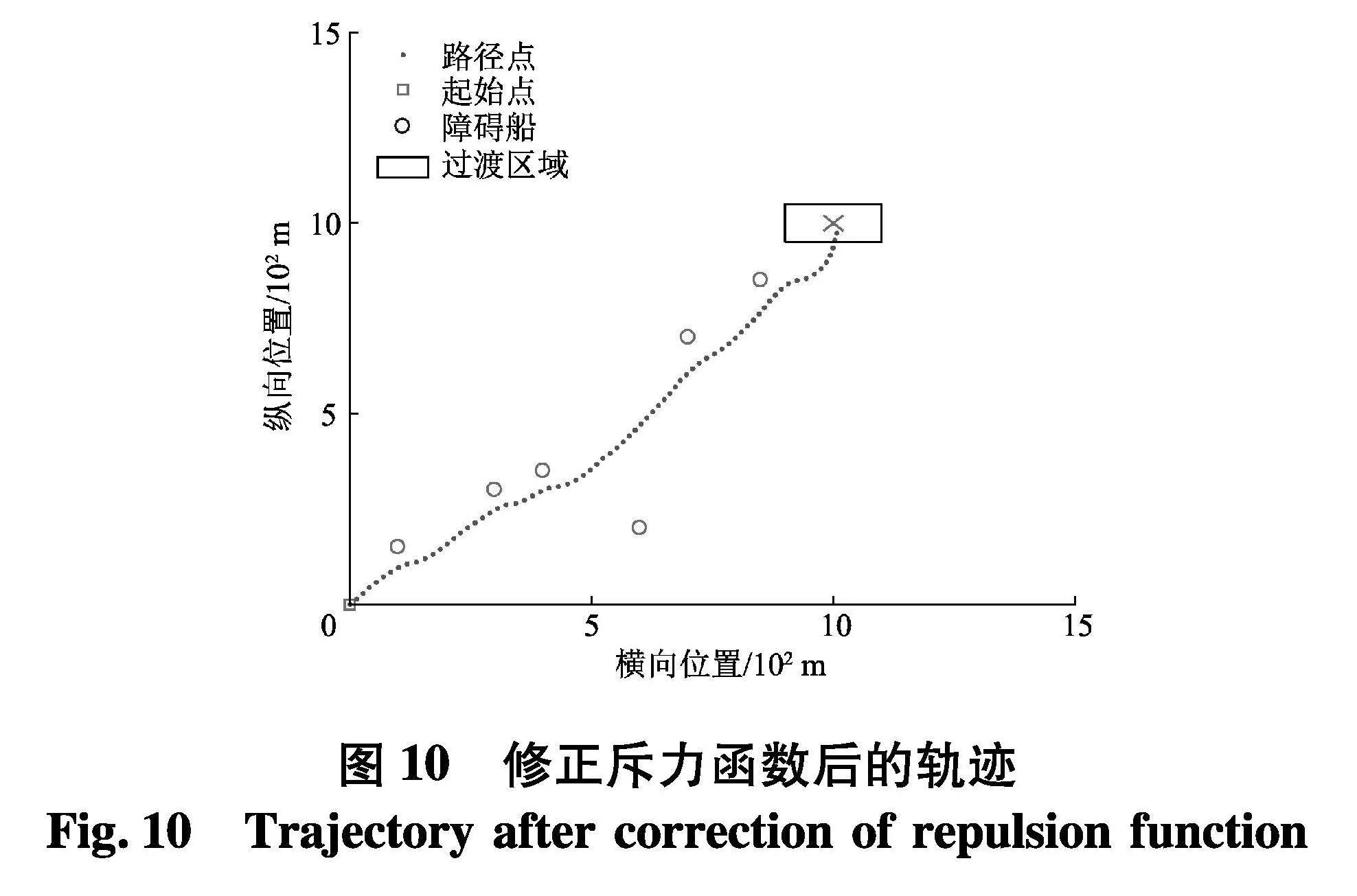
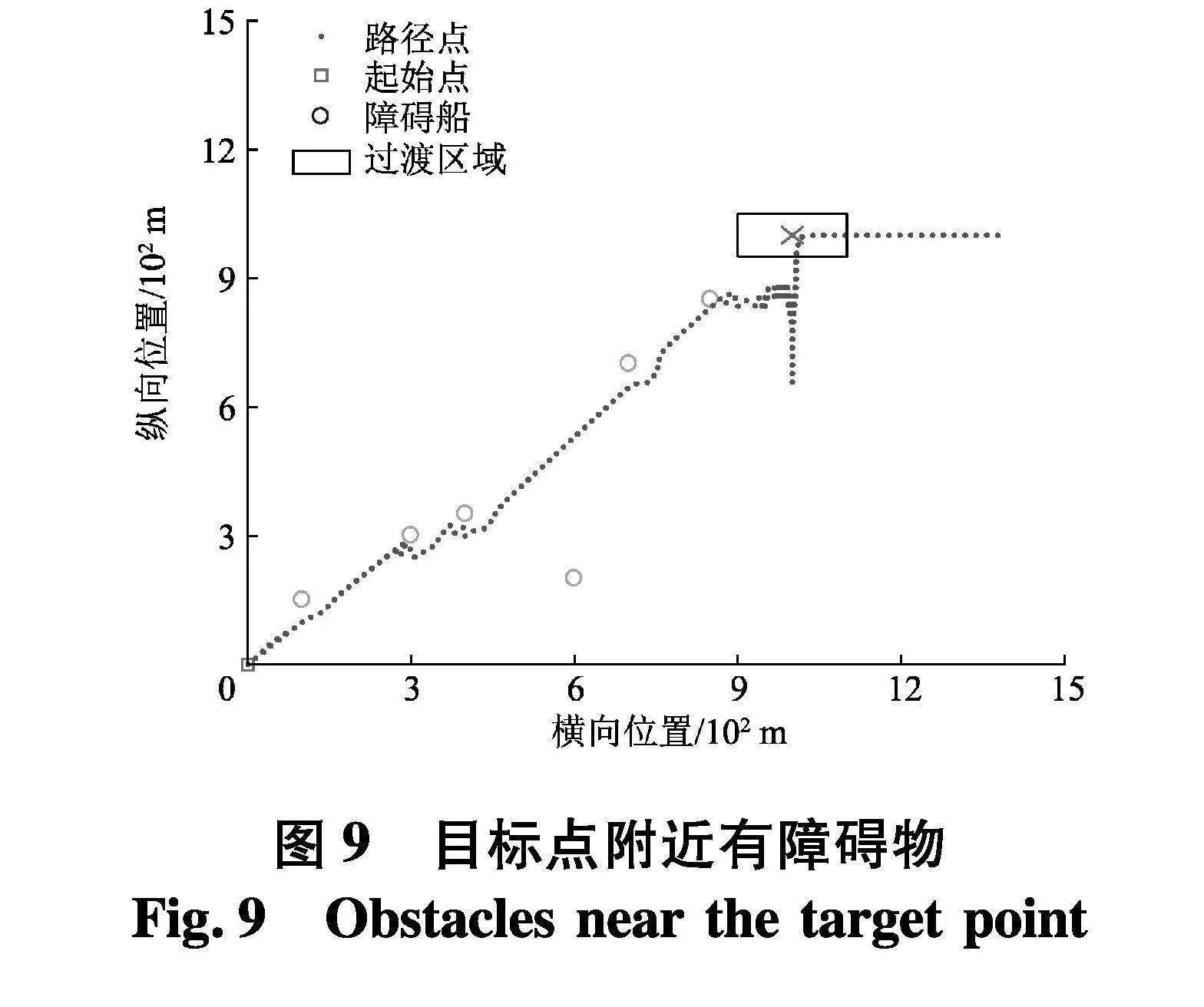
(2) 目标不可达问题.从图9可知,当过渡区域附近有障碍船时,近距离使得障碍船对本船产生较大斥力,而泊位目标点对其的引力相对较小,船舶轨迹在过渡区域摆动,很难到达过渡区域.
在原有斥力场基础上,加上了目标和物体距离对斥力的影响.当船舶靠近过渡区域时,虽然斥力场要增大,但与障碍船的距离在减少,可以抵消一部分的斥力场.修正后的仿真结果如图10,该轨迹可顺利避开障碍船,到达过渡区域.
由图11、12可知,当过渡区域附近有障碍物时,传统人工势场法下的艏向角震荡明显,在目标点附近陷入了循环,不能顺利到达目标点,而优化斥力函数后的人工势场法,艏向输出平缓,解决了目标点附近有障碍船而导致的目标不可达的问题.
3" 面向欠驱商船自主靠泊的码头末端镇定靠泊规划方法
码头末端镇定靠泊阶段是指船舶从过渡区域向码头靠拢的运动过程,靠岸阶段的船舶主要运动参数有靠岸角和靠岸速度等.
靠岸区是一个长度L1接近于船长,宽度为靠岸横距D(一般为2~3倍船宽)的矩形区域,按照曹妃甸海事处靠离泊计划,根据船舶长度,事先预留的靠泊位置的长度应为船舶总长的120%,若船舶的总长度小于100 m,预留泊位有效长度应当比靠泊船舶总长多20 m[17].在进入靠岸区前,应对船舶的姿态进行调整,从而便于靠岸.为保证靠岸的过程不发生与泊位周围船舶的碰撞,船舶的靠岸运动应限制在该区域内.
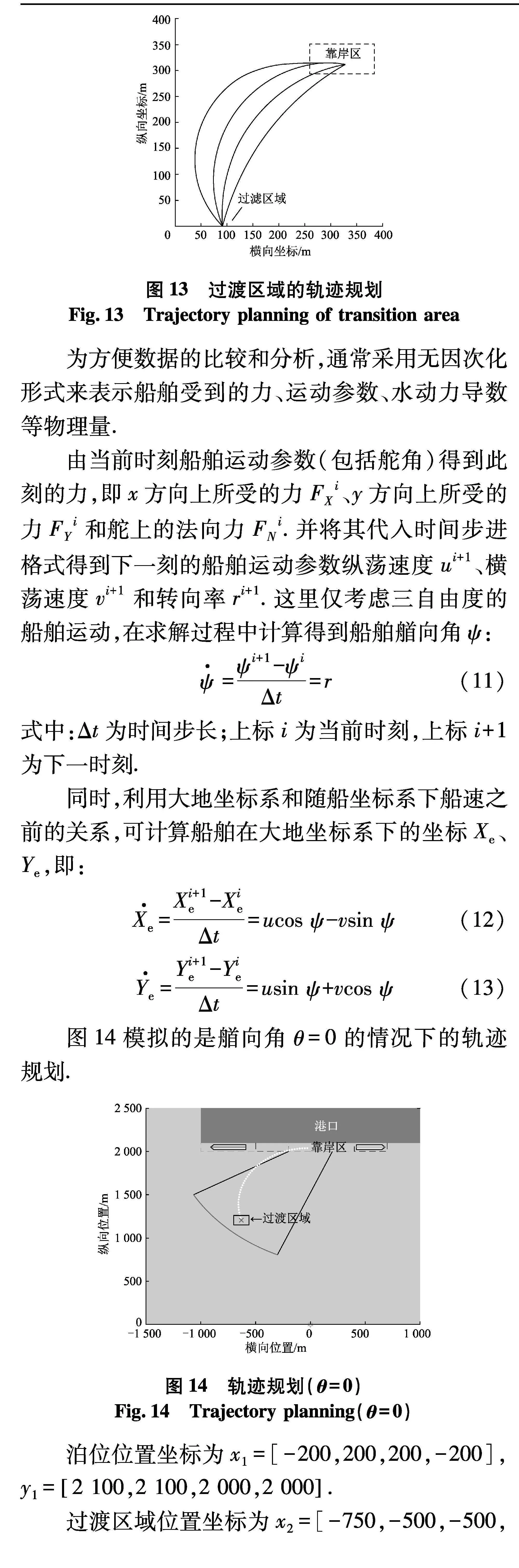
3.1" 过渡区域位置轨迹规划
由于到达过渡区域的艏向不同,需根据不同的艏向规划不同的航线.船舶到达过渡区域后,根据不同的艏向角,选择不同的航线.如图13为不同艏向角下的方便驶入泊位的轨迹规划.为保证能安全驶入泊位,船舶应在到达过渡区域之前提前及时调整艏向角.
为方便数据的比较和分析,通常采用无因次化形式来表示船舶受到的力、运动参数、水动力导数等物理量.
由当前时刻船舶运动参数(包括舵角)得到此刻的力,即x方向上所受的力FXi、y方向上所受的力FYi和舵上的法向力FNi.并将其代入时间步进格式得到下一刻的船舶运动参数纵荡速度ui+1、横荡速度vi+1和转向率ri+1.这里仅考虑三自由度的船舶运动,在求解过程中计算得到船舶艏向角ψ:
ψ·=ψi+1-ψiΔt=r(11)
式中:Δt为时间步长;上标i为当前时刻,上标i+1为下一时刻.
同时,利用大地坐标系和随船坐标系下船速之前的关系,可计算船舶在大地坐标系下的坐标Xe、Ye,即:
Xe·=Xi+1e-XieΔt=ucos ψ-vsin ψ(12)
Ye·=Yi+1e-YieΔt=usin ψ+vcos ψ(13)
图14模拟的是艏向角θ=0的情况下的轨迹规划.
泊位位置坐标为x1=[-200,200,200,-200],y1=2 100,2 100,2 000,2 000.
过渡区域位置坐标为x2=[-750,-500,-500,-750],y2=1 250,1 250,1 100,1 100.
船舶到达过渡区域之后,根据自身艏向角及泊位信息,选取合适的轨迹进行靠泊操作.
3.2" 码头末端镇定约束
考虑大型商船的安全操纵性,鉴于其体积大而导致的惯性大,所以在自主靠泊过程中的航速和航向控制对船舶的安全操纵尤为重要.在靠近泊位前船速应递减直至接近为零[18].
在实际应用中,当距离泊位4~5 n mile时应开始降速,通常情况下,应在6 min内,即在航行1 n mile的距离内可以完成.余下的3~4 n mile的航程为停车淌航的过程.
码头末端镇定靠泊阶段即停船后的位移无超调的泊位外镇定控制,在图3中体现为过渡区域到靠岸区的过程.
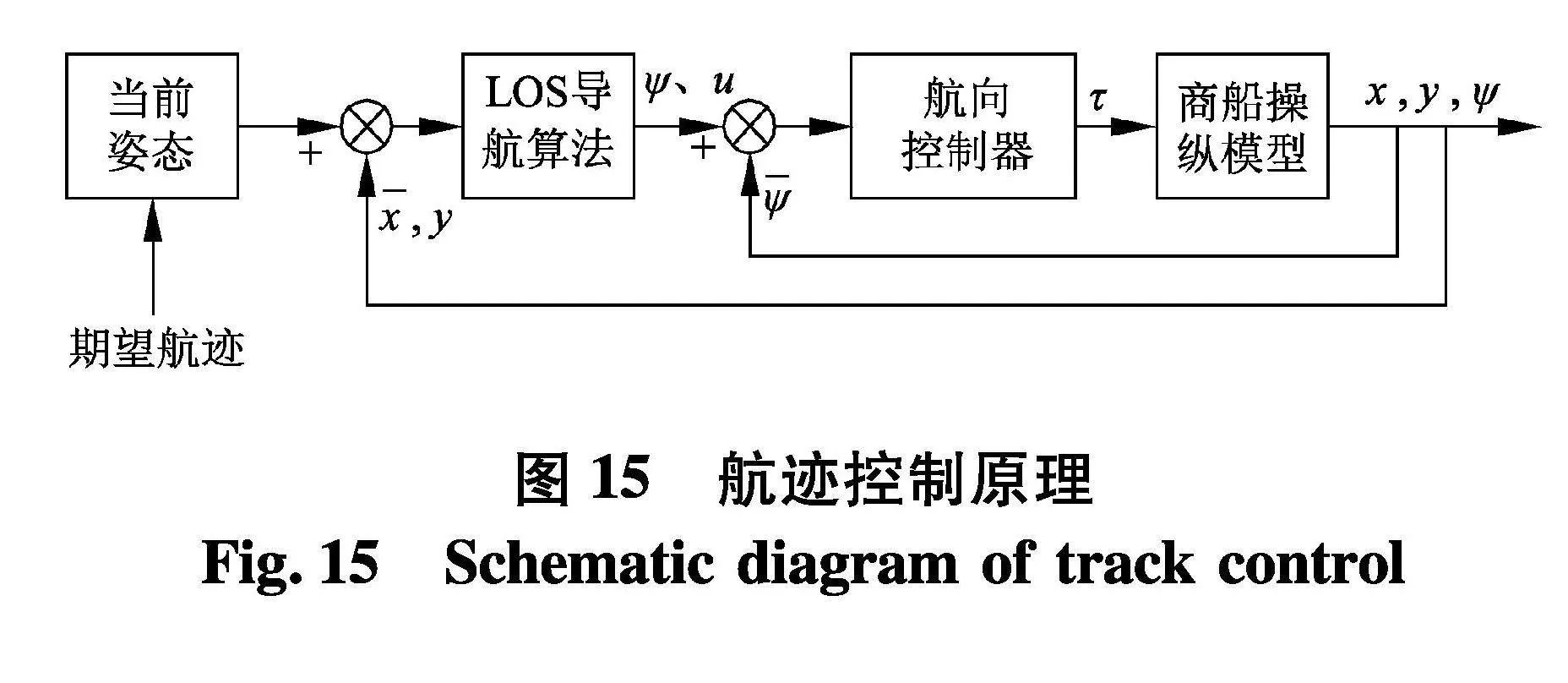
这一过程与时间相关,属于轨迹跟踪问题,图15为航迹控制原理.应用自适应LOS算法,将当前的姿态和规划好的航线进行对比,得到航迹偏差,通过LOS导航算法得到当前命令航向角,经过航向控制得出期望的艏摇方向力τ,并作用于商船操纵模型,从而缩小航向的偏差.最终实现路径追踪的目的.
4" 结论
(1) 针对欠驱商船在自主靠泊时的轨迹规划任务,考虑其自身的体型较大,相比较小型无人艇在低速靠泊状态下存在惯性大,操纵性、航向稳定性弱等缺点,将自主靠泊过程分为远码头轨迹规划阶段和码头末端镇定靠泊两部分,并对两部分分别进行研究.
(2) 在远码头轨迹规划阶段,鉴于大型商船对靠泊水域有较高的要求,融入了过渡区域,同时对传统人工势场法进行了优化,解决了引力过大和目标不可达的问题,在此基础上绘制舵角的输出变化曲线,并进行航迹规划,为商船选择合适的航线进行靠泊提供了理论依据.
(3) 所提的方法对于在没有拖轮等提供帮助的场景下的欠驱商船顺利靠泊提供了参考和借鉴的意义,提高了靠泊安全和效率.
参考文献(References)
[1]" 陆朝勇.大型船舶进出港安全操纵[J].中国水运,2021,21(3):115-116.
[2]" 黄海波.大型船舶靠离港新泊位引航技术探讨[J].中国水运, 2021,21(1):5-6.
[3]" 张闯,范中洲.大型船舶自主靠泊方法研究[J].中国水运,2014,14(8):17-18.
[4]" CHEN G J,YI J,ZHAO D.Stabilization of an underactuated surface vessel via discontinuous control[C]∥American Control Conference. New York :IEEE, 2007: 206-211.
[5]" 张山甲,王建华,郑翔,等.基于视觉伺服的欠驱动无人水面艇自主靠泊方法[J].船舶工程,2020,42(7):144-151.
[6]" 黄烨笙,徐郑攀,陈远明,等.无人艇自主靠泊控制系统设计[J].中国测试,2020,46(10):111-117.
[7]" YOSHIKI M,RYOHEI S,YOUHEI A,et al. Optimization on planning of trajectory and control of autonomous berthing and unberthing for the realistic port geometry[J].Ocean Engineering,2022,245:110390.
[8]" 赵明,郑泽宇,么庆丰,等.基于改进人工势场法的移动机器人路径规划方法[J].计算机应用研究,2020,37(S2):66-68,72.
[9]" 陈田田. 基于改进人工势场法的室内移动机器人路径规划研究[D].郑州:郑州大学,2019.
[10]" 郑利红,荣国宏,李元宗.基于改进的Khatib方法的冗余机器人手避障轨迹规划[J].太原理工大学学报,2001,32(1):29-32.
[11]" 王行武.大型船舶自动靠泊运动控制研究[D].武汉:武汉理工大学,2020.
[12]" 王伟业.考虑动力响应的欠驱动船舶路径跟随控制方法研究[D].武汉:武汉理工大学,2020.
[13]" 岳晋.喷水推进无人艇六自由度运动建模与仿真研究[D].大连:大连海事大学,2016.
[14]" 邹蓓蕾,陈淑玲,王洪富,等.规则波中迎浪航行的三体无人监测船阻力性能及片体布局影响研究[J].江苏科技大学学报(自然科学版),2021,35(3):16-23.
[15]" 张强. 船舶自动靠泊简捷非线性鲁棒控制[D].大连:大连海事大学,2018.
[16]" NAMKYUN I, HASEGAWA K. All direction approach automatic berthing controller" using ANN(artifical neural networks)[J].IFAC Proceedings Volumes,2007,40(17): 300-304.
[17]" 黄泽中.国投曹妃甸210#泊位靠离泊安全操作[J].中国水运,2019,(8):36-37.
[18]" 闵德权,董洁,田玉玲.排放限制下考虑风浪的邮轮航速研究[J].江苏科技大学学报(自然科学版),2022,36(1):12-19.
(责任编辑:贡洪殿)