永磁同步电机改进积分型时变滑模控制
2024-09-04程勇李思卿李森豪

摘 "要:为了提高永磁同步电机的控制性能,改善对于电机的控制方法,针对永磁同步电机的积分滑模控制进行研究,首先提出积分滑模控制在运行中遭遇未知干扰后易产生转速超调的问题,然后通过定义自调节的积分初值来消除运行过程中因积分累积所产生的超调,改善转速超调问题。其次为了提高滑模控制在电机的整个运动的全局阶段的收敛性,提出基于预测在线寻优的时变滑模控制,通过预测控制变量来选出当前时刻的最优滑模面,使得状态变量可以更快收敛到滑模面,进一步降低转速误差,提高系统的控制精度与控制速度。最后建立扩张状态观测器来观测系统的未知干扰,对控制器进行补偿,提高整个控制系统的鲁棒性,并且通过仿真和实验验证了所提出方法的有效性。
关键词:永磁同步电机;积分滑模;时变滑模;全局收敛性;扩张状态观测器;模型预测
DOI:10.15938/j.emc.
中图分类号:TM341 " " " " " "文献标志码:A " " " " "文章编号:1007 -449X(2024)07-0000-00
Time-varying sliding mode control of permanent magnet synchronous motor based on improved integral sliding mode
CHENG Yong, LI Siqing,LI Senhao
(College of Electrical and Control Engineering, Xi'an University of Science and Technology, Xi'an 710600, China)
Abstract: In order to improve the control performance of permanent magnet synchronous motor and improve the control method of the motor, the integrated sliding mode control of permanent magnet synchronous motor is studied. Firstly, the problem that the integrated sliding mode control is easy to produce speed overshoot after encountering unknown interference during operation is proposed. Then, the overshoot caused by integral accumulation during operation is eliminated by defining the initial integral value of self-regulation. Improved the problem speed overshoot. Secondly, in order to improve the convergence of sliding mode control in the global stage of the whole stage of the motor operating, a time-varying sliding mode control based on predictive control that optimized online is proposed. The optimal sliding mode surface at the current moment is selected through predictive control variables, so that the state variables can converge to the sliding mode surface faster, further reduce the speed error, and improve the control accuracy and control speed of the system. Finally, an extended state observer is built to observe the unknown interference of the system, compensate the controller, and improve the robustness of the whole control system. The effectiveness of the proposed method is verified by simulation and experiment.
Keywords:permanent magnet synchronous motor; integral sliding mode; time-varying sliding mode; global convergence; extended state observer; model prediction
0 引 "言
在新能源大力发展的背景下,效率高、结构简单、高功率密度的永磁同步电机(permanent magnet synchronous motor,PMSM)已经在交通运输、航天航空和机器人等方面获得了广泛的应用[1-2],其控制方法也成为了电气、机械等行业的研究热点。在对于永磁同步电机的双闭环控制当中,比例积分(proportional integral,PI)控制是目前最为广泛的转速环控制方法,其实现简单,不依赖于系统的精确模型,对系统参数不敏感,但在高精度控制场合下,PI控制难以实现理想的控制性能[3]。在进一步的研究当中,有学者提出基于模型的模型预测控制,对系统建立状态方程,并进行离散化,即可得到在当前控制周期的预测值,通过价值函数对预测变量进行评定,最终得到最优的控制方案。模型预测控制的在线寻优使得控制系统具有更好的动态性能,但是其对控制模型的参数准确性有很高的要求,当控制系统的参数发生失配时,控制性能也会下降[4]。文献[5]将电流的预测值和实际采样值的差值作为补偿因子,补偿预测误差,实现了鲁棒型的模型电流预测控制。文献[6]将模型的参数不确定性建模,并通过超局部模型建立控制器,降低了预测控制对参数失配的敏感性。此外,在对于模型预测控制在电流环的应用中也引入了多矢量控制技术的概念,文献[7]提出三矢量的模型预测电流控制,使得合成的期望电压矢量可以覆盖任意方向,任意幅值。
为了提高控制系统鲁棒性,也有学者提出具有变结构性质的滑模控制,其可以根据系统状态有目的改变控制结构,是一种非线性的控制方法。滑模控制中滑动模态的设计与系统参数无关,所以滑模控制具有鲁棒性强[8]、对参数变化不敏感的优点[9]。文献[10]建立基于自适应变速趋近律的非奇异终端滑模控制,根据状态变量调节趋近速度,并且将非线性滑模面引入滑模控制进一步提高了滑模控制的收敛性。文献[11]结合模糊神经网络控制,将时变滑模面引入滑模控制中,对滑模面斜率值进行在线调整,有效缩短系统状态到达滑动模态的时间。然而在传统滑模控制中,滑模面系数为定常数值,滑模面斜率固定,影响了滑模控制在趋近阶段的快速收敛性。
首先对传统积分滑模控制进行分析,提出积分型滑模控制在运行过程中遭遇未知干扰后易发生超调的问题,对此设计了可自调节的积分初值,消除在启动和突加负载之后的超调现象。然后结合预测控制可在线寻优的特点,对不同滑模面系数下所产生的控制输出进行寻优,通过价值函数评定出当前控制周期下的最优滑模面,实现了时变积分滑模控制(time-varying integral sliding mode control,TISMC)。最后通过建立扩张状态观测器,对未知干扰进行观测并补偿到控制器中,降低滑模控制对高增益的依赖性。
1 传统积分滑模控制设计
1.1 永磁同步电机模型
4 "仿真分析
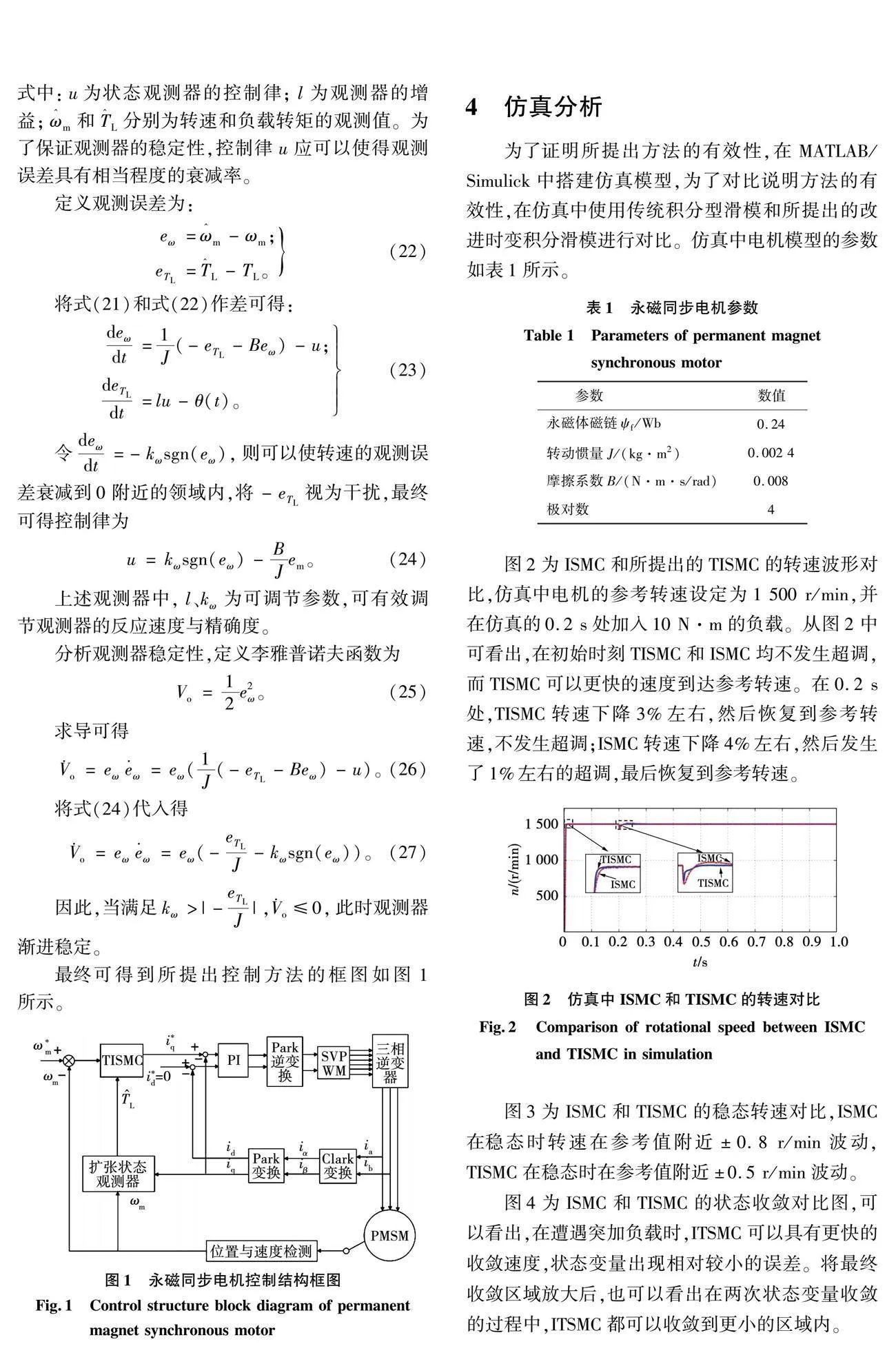
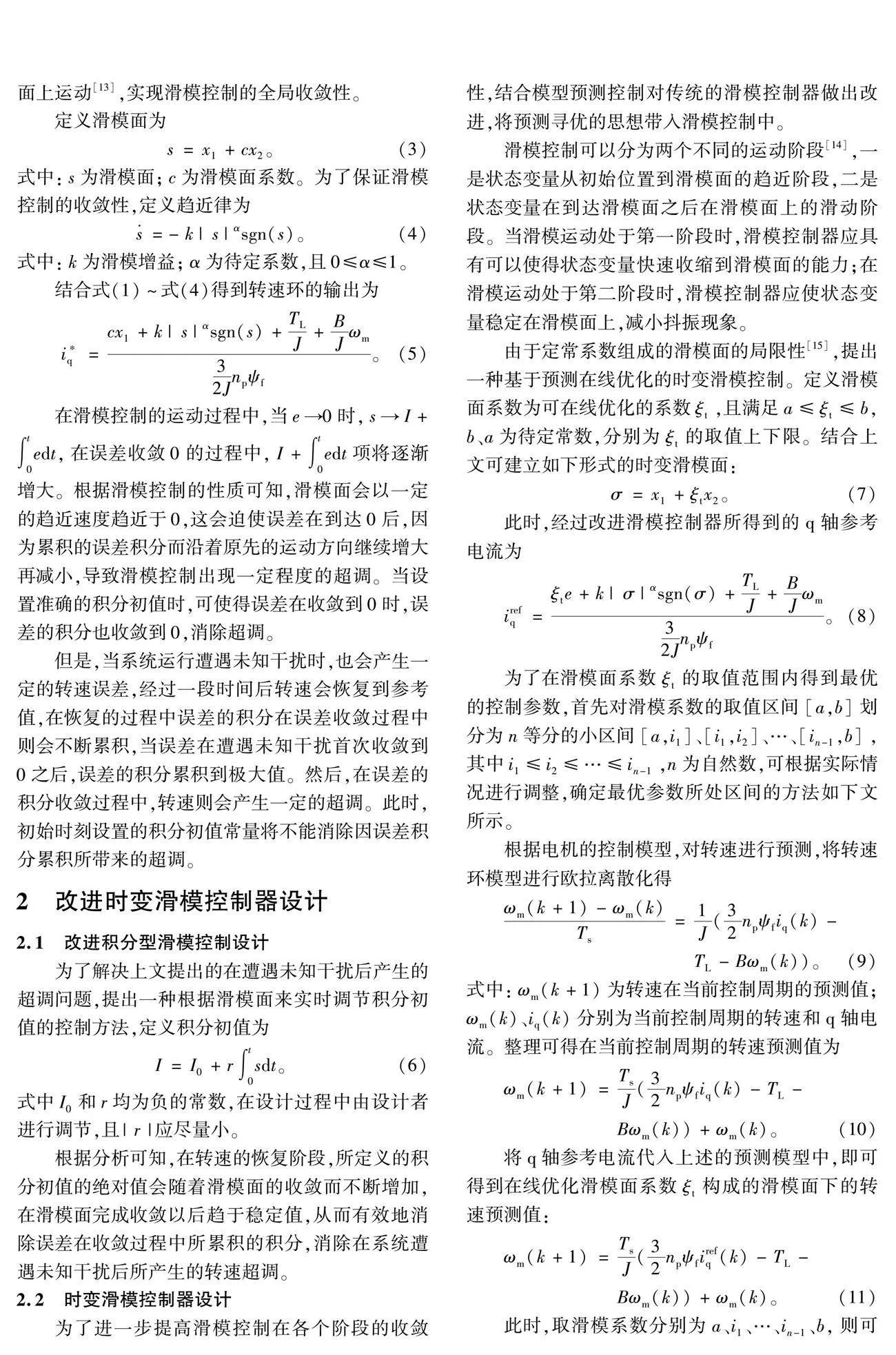
为了证明所提出方法的有效性,在MATLAB/Simulick中搭建仿真模型,为了对比说明方法的有效性,在仿真中使用传统积分型滑模和所提出的改进时变积分滑模进行对比。仿真中电机模型的参数如表1所示。
图2为ISMC和所提出的TISMC的转速波形对比,仿真中电机的参考转速设定为1500r/min,并在仿真的0.2s处加入10N∙M的负载。从图2中可看出,在初始时刻TISMC和ISMC均不发生超调,而TISMC可以更快的速度到达参考转速。在0.2s处,TISMC转速下降3%左右,然后恢复到参考转速,不发生超调;ISMC转速下降4%左右,然后发生了1%左右的超调,最后恢复到参考转速。
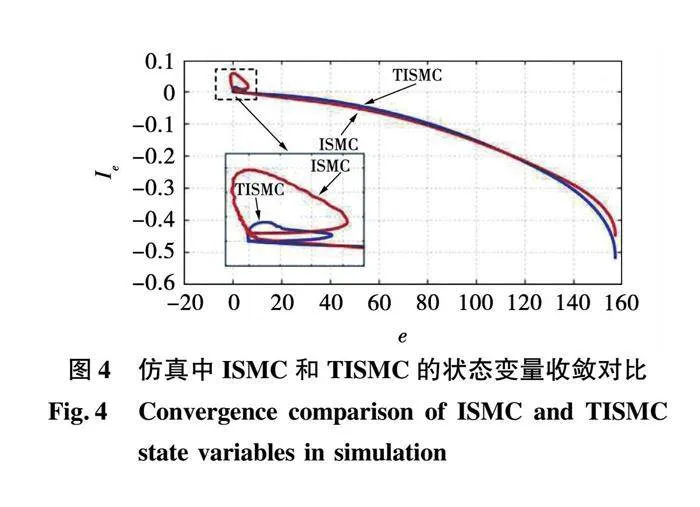
图3为ISMC和TISMC的稳态转速对比,ISMC在稳态时转速在参考值附近±0.8r/min波动,TISMC在稳态时刻在参考值附近±0.5r/min波动。
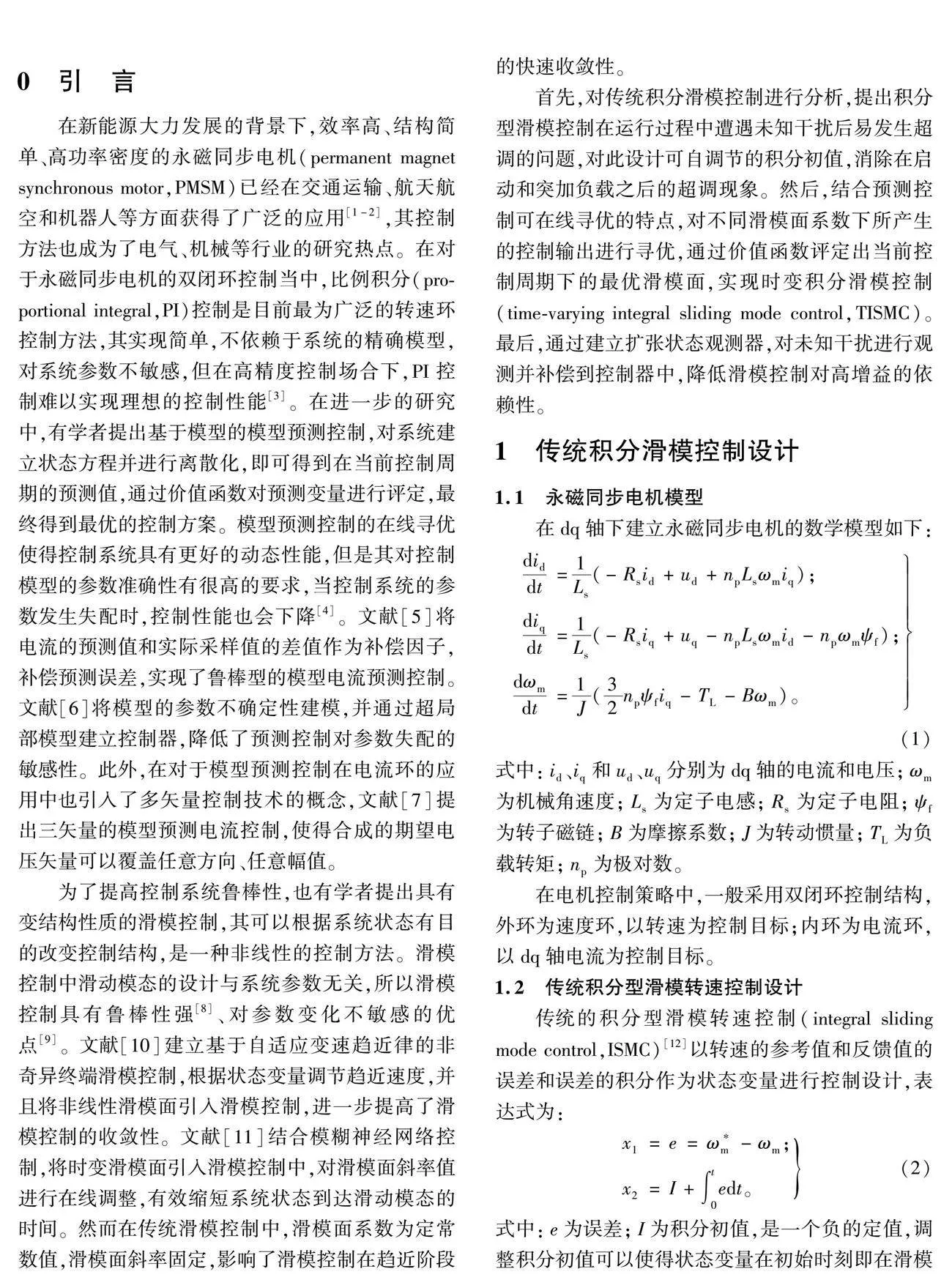
图4为ISMC和TISMC的状态收敛对比图,可以看出,在遭遇突加负载时,ITSMC可以具有更快的收敛速度,状态变量出现相对较小的误差。将最终收敛区域放大后,也可以看出在两次状态变量收敛的过程中,ITSMC都可以收敛到更小的区域内。
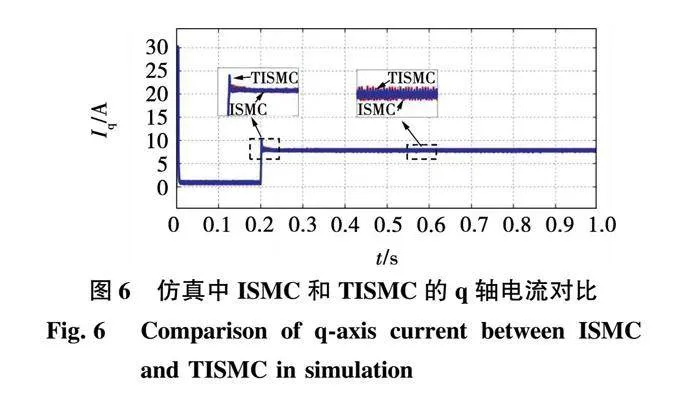
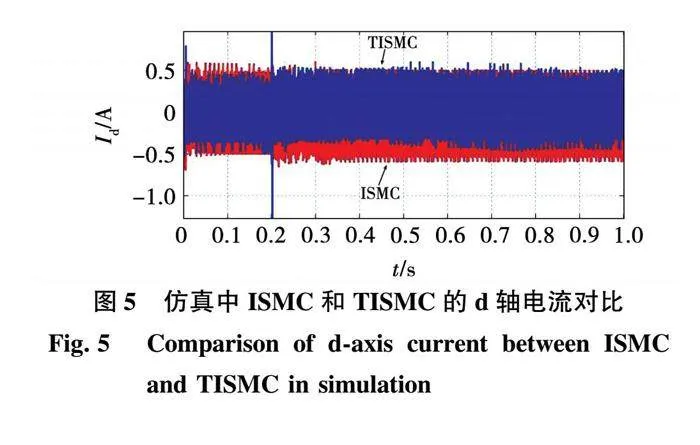
图5和图6分别为ISMC和TISMC的dq轴电流对比,在0.2s处,TISMC的q轴电流会具有更高的反应速度,来对抗突加的负载,在稳态时刻,TISMC的d轴电流误差在±0.5A内波动,ISMC的d轴电流误差在±0.6A内波动,同样TISMC的q轴电流波动也小于ISMC。
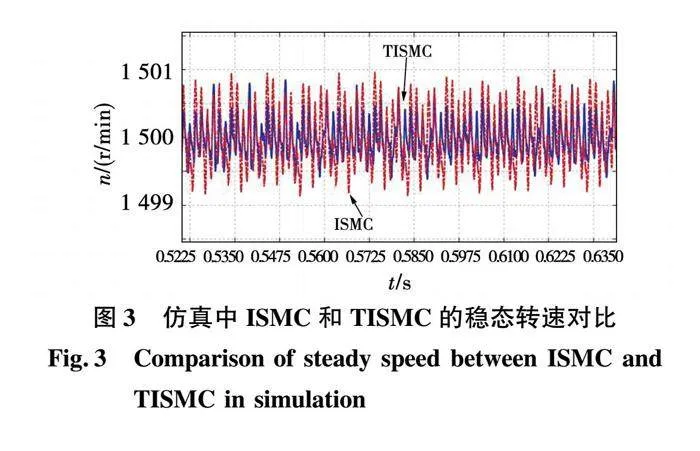
图7为所提出的观测器的输出值与转矩的参考值,在0.2s后观测器可准确快速的估计到系统的突加负载。
5 "实验验证
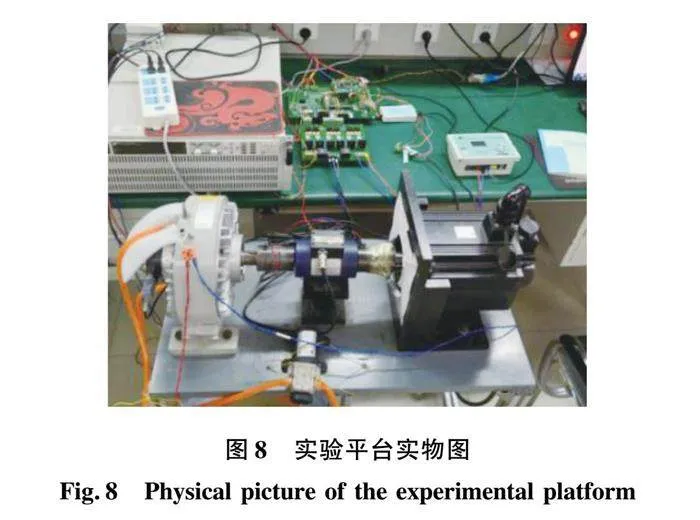
为了进一步验证所提出方法的有效性,利用DSP28335对永磁同步电机搭建控制平台,通过张力控制器为实验提供负载,所搭建的实验平台如图8所示。
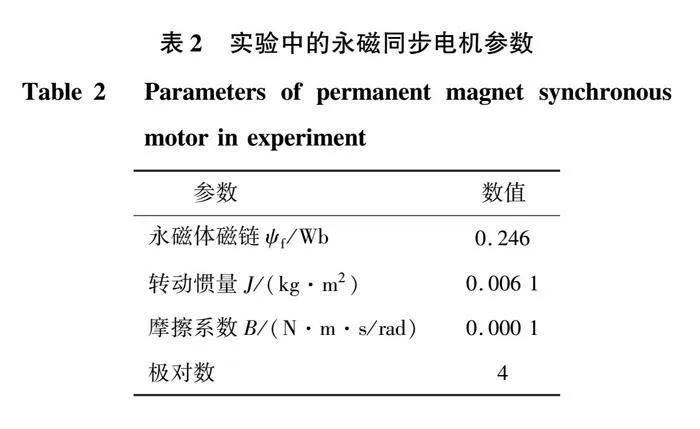
实验中,所使用的电机为4.3kW的表贴氏永磁同步电机,电机具体参数如表2所示,其中转动惯量为厂家测试后所得。
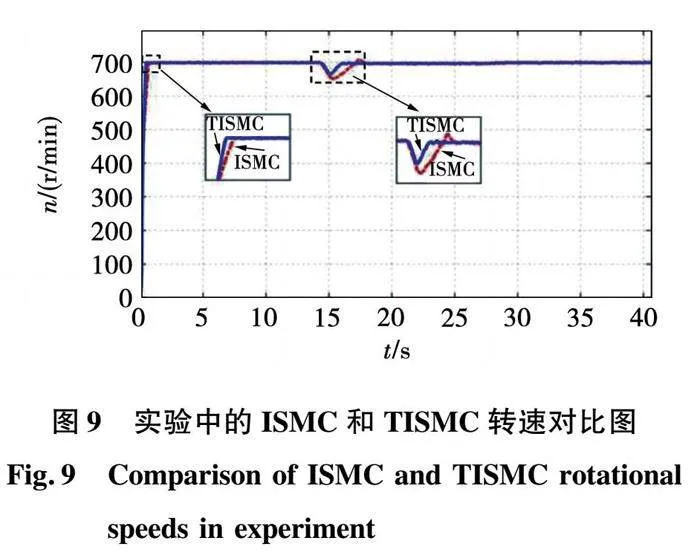
图9为实验中的转速对比图,在实验中,参考转速设定为700r/min,在实验的14s左右突加负载,结果如下,在电机启动时刻TISMC率先到达参考转速,且无超调。在突加负载后,TISMC转速下降5%左右,ISMC转速下降6.7%左右,且TISMC在突加负载后再收敛时并未产生超调,ISMC在突加负载后,恢复速度明显慢于TISMC,且产生了1.4%左右的超调。
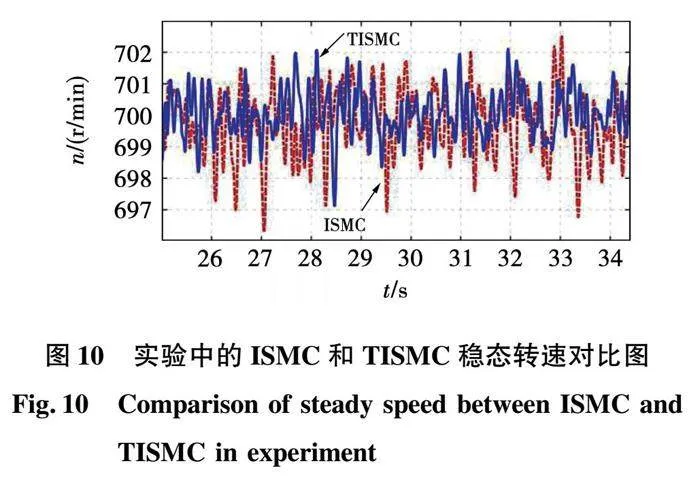
图10为实验中的稳态转速对比图,TISMC的转速误差维持在±2r/min,然而ISMC的转速误差则是在±3r/min内波动。
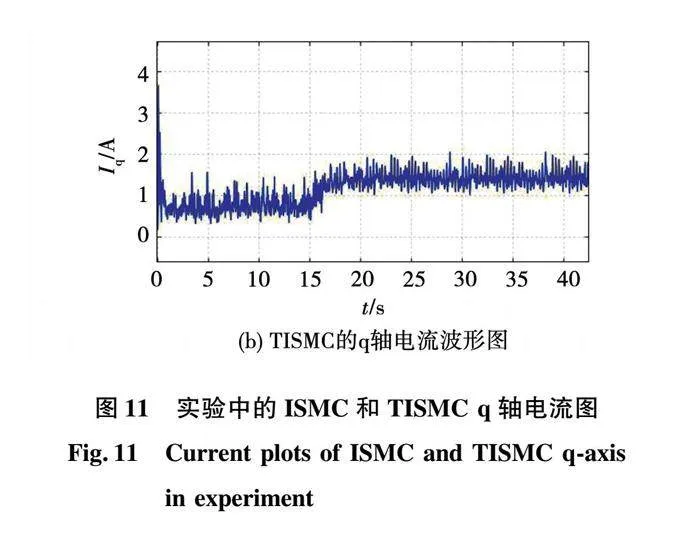
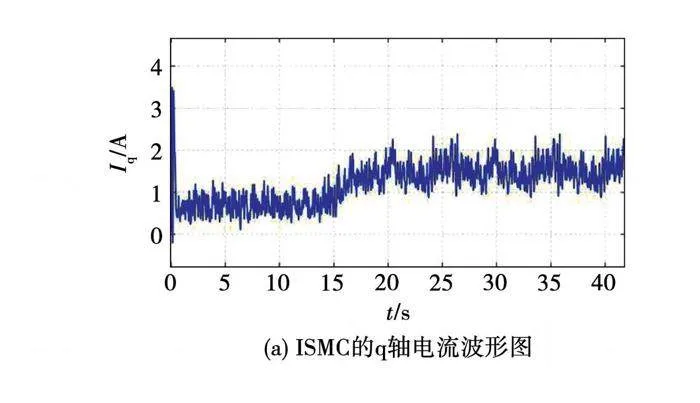
图11为实验中的q轴电流,图11(a)为TISMC的q轴电流波形图,图11(b)为ISMC的q轴电流波形图,在加入负载后TISMC明显可以更快到达指定电流且稳态误差更小。
6 "结 "论
通过仿真和实验证明了所提出的自调节积分初值可有效消除积分型滑模在遭遇突加负载后的超调现象。在实验和仿真中,通过与ISMC进行比较,证明使用预测在线寻优所构成的时变滑模控制技术在系统运动的全局阶段都具有更好的收敛性,在启动时刻可以以更快的速度到达参考转速,突加负载时反应迅速,稳态误差也更小。同时,在仿真中也证明了所设计的观测器也可以准确迅速的估计出系统的突加负载。
参考文献:
[1] 禹聪,康尔良.永磁同步电机模糊滑模速度控制器设计[J].电机与控制学报,2022,26(7):98.
YU Cong, KANG Erliang. Design of fuzzy sliding mode speed controller for permanent magnet synchronous motor [J]. Electric Machines and Control, 2022,26(7):98.
[2] 彭思齐,宋彦彦.基于自适应模糊滑模观测器的永磁同步电机无传感器矢量控制[J].控制与决策,2018,33(4):644.
PENG Siqi, SONG Yanyan. Sensorless vector control of permanent magnet synchronous motor based on adaptive fuzzy sliding mode observer [J]. Control and Decision,2018,33(4):644.
[3] 殷凯轩,高琳,付文华,等.永磁同步电机的改进模型预测自抗扰前馈控制[J].西安交通大学学报,2021,55(4):29.
YIN Kaixuan, GAO Lin, FU Wenhua, et al. Improved model predictive active disturbance rejection feedforward control for permanent magnet synchronous motor [J]. Journal of Xi'an Jiaotong University,2021,55(4):29.
[4] 李键,牛峰,黄晓艳,等.永磁同步电机有限控集模型预测电流控制预测误差分析[J].电机与控制学报,2019,23(4):1.
LI Jian, NIU Feng, HUANG Xiaoyan, et al. Current control prediction error analysis of permanent magnet synchronous motor based on finite control set model [J]. Electric Machines and Control,2019,23(4):1.
[5] 姚绪梁,麻宸伟,王景芳,等.基于预测误差补偿的鲁棒型永磁同步电机模型预测电流控制[J].中国电机工程学报,2021,41(17):6071.
YAO Xuliang, MA Chenwei, WANG Jingfang, et al. Robust permanent magnet synchronous motor model predictive current control based on prediction error compensation [J]. Proceedings of the CSEE,2021,41(17):6071.
[6] 赵凯辉,周瑞睿,冷傲杰,等.一种永磁同步电机的有限集无模型容错预测控制算法[J].电工技术学报,2021,36(1):27.
ZHAO Kaihui, ZHOU RuiRui, LENG aojie, et al. A finite set model-free fault-tolerant predictive control algorithm for permanent magnet synchronous motor [J]. Transactions of the China Electrotechnical Society,2021,36(1):27.
[7] 徐艳平,王极兵,张保程,等.永磁同步电机三矢量模型预测电流控制[J].电工技术学报,2018,33(5):980.
XU Yanping, WANG Jibing, ZHANG Baocheng,et al. Three-vector model for predicting current control of permanent magnet synchronous motor [J]. Transactions of the China Electrotechnical Society,2018,33(5):980.
[8] 宁博文,周凤星,卢少武.基于高阶滑模速度控制器的异步电机模型预测转矩控制[J].控制与决策,2021,36(4):953.
NING Bowen, ZHOU Fengxing, LU Shaowu. Model predictive torque control of induction motor based on high-order sliding mode speed controller [J]. Control and Decision,2021,36(4):953.
[9] "LI Zongxing,ZHANG Rui, Time-varying sliding mode control of missile based on suboptimal method[J].Journal of Systems Engineering and Electronics,2021,32(3):700.
[10] 许波,朱熀秋.自适应非奇异终端滑模控制及其在BPMSM中的应用[J].控制与决策,2014,29(5):833.
XU Bo, ZHU Huangqiu.Adaptive non-singular terminal sliding mode control and its application in BPMSM [J]. Control and Decision,2014,29(5):833.
[11] 魏惠芳,王丽梅.永磁直线同步电机自适应模糊神经网络时变滑模控制[J].电工技术学报,2022,37(4):861.
WEI Huifang, WANG Limei. Adaptive fuzzy neural network time-varying sliding mode control for permanent magnet linear synchronous motor [J]. Transactions of China Electrotechnical Society,2022,37(4):861.
[12] 李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34(3):431.
LI Zheng, HU Guangda,CUI Jiarui,et al. Integrated sliding mode variable structure control of permanent magnet synchronous motor speed control system [J]. Proceedings of the CSEE,2014,34(3):431.
[13] 高庆忠,关焕新,于子淞,等.自适应补偿器永磁同步电机积分型连续滑模控制[J].电机与控制学报,2017,21(2):103.
GAO Qingzhong, GUAN Huanxin, YU Zisong, et al. Integrated continuous sliding mode control for permanent magnet synchronous motor with adaptive compensator [J]. Electric Machines and Control,2017,21(2):103.
[14] 吕德刚,李子豪.表贴式永磁同步电机改进滑模观测器控制[J].电机与控制学报,2021,25(10):58.
LV Degang, LI Zihao. Improved sliding mode observer control for table-mount permanent magnet synchronous motor [J]. Electric Machines and Control,2021,25(10):58.
[15] 黄国勇,胡吉晨,吴建德,等.自适应时变Terminal滑模控制研究[J].计算机应用,2013,33(1):222.
HUANG GuoYong, HU Jichen, WU Jiande, et al. Research on adaptive time-varying terminal sliding mode control [J]. Computer Applications,2013,33(1):222.
[16] FENG L, DENG M, XU S, et al.Speed regulation for PMSM drives based on a novel sliding mode controller[J].IEEE Access,2020,8:63577.
(编辑:邱赫男)
