基于扩张状态观测器的永磁直线同步电机改进模型预测电流控制
2024-09-04赵希梅孙文浩金鸿雁

摘 "要:针对永磁直线同步电机(PMLSM)模型预测电流控制(MPCC)中存在的电流脉动过大、在线计算复杂的问题,提出一种基于扩张状态观测器(ESO)的改进MPCC策略。利用最优电压矢量相角和重新划分后的电压矢量扇区,改进了第一电压矢量的选取方式,减小了第二电压矢量选择范围,以实现电压矢量的快速选取,进而降低电流脉动。同时,为了提高PMLSM抗负载扰动能力,通过ESO对扰动进行观测,将观测到扰动转换为电流进行补偿,提高了系统的鲁棒性,且补偿电流可起到进一步减小电流脉动的作用。仿真结果表明,所提出的控制方法切实可行,与MPCC相比,基于ESO的改进MPCC系统具有更好的控制性能,更小的电流脉动和较强的鲁棒性能。
关键词:永磁直线同步电机;改进模型预测电流控制;扩张状态观测器;最优电压矢量相角;电流脉动;鲁棒性
DOI:10.15938/j.emc.
中图分类号:TM351 " " " " " " 文献标志码:A " " " " "文章编号:1007-449X(2024)07-0000-00
Improved model predictive current control based on
extended state observer for permanent magnet linear synchronous motor
ZHAO Ximei, SUN Wenhao, JIN Hongyan
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
Abstract: In order to solve the problems of excessive current ripple and complex online calculation in model predictive current control (MPCC) of permanent magnet linear synchronous motor (PMLSM), an improved MPCC strategy based on extended state observer (ESO) was proposed. Using the optimal voltage vector phase angle and the re-divided voltage vector sector, the selection method of the first voltage vector is improved, and the selection range of the second voltage vector is reduced, so as to realize the rapid selection of the voltage vector and reduce the current ripple. At the same time, in order to improve the anti-load disturbance capability of PMLSM, the disturbance is observed through ESO, and the observed disturbance is converted into current for compensation, which improves the robustness of the system, and the compensation current can further reduce the current ripple. The simulation results show that the proposed control method is feasible. Compared with MPCC, the improved MPCC system based on ESO has better control performance, smaller current ripple and stronger robustness.
Keywords: permanent magnet linear synchronous motor; improved model predictive current control; extended state observer; optimal voltage vector phase angle; current ripple; robustness
0 引 "言
随着近些年先进制造业的高速发展,其对数控机床的速度和精度的要求不断提升,在激光、航空航天、微电子等高精度工业领域使用永磁直线同步电机(permanent magnet linear synchronous motor,PMLSM)作为核心元件进行直接驱动,可提高系统的控制精度和响应速度[1-2]。然而,由于省略中间传动环节,PMLSM伺服系统易受参数变化和负载扰动等不确定性影响[3-4]。因此,需要克服不确定性对系统的不利影响,提高系统的控制性能。
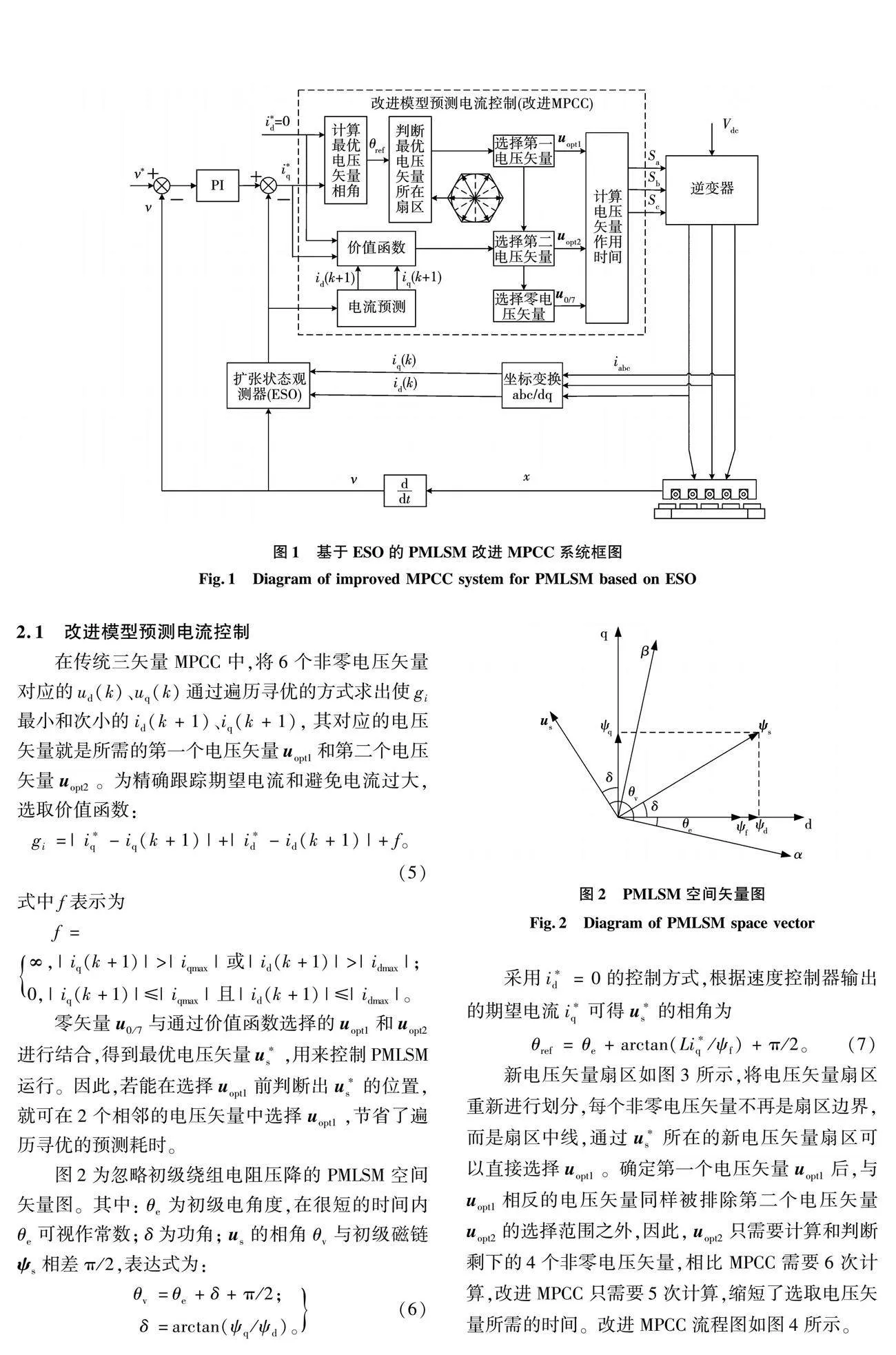
电流环为保证电流能精确跟踪期望电流,抑制各种扰动,需要较好的跟踪与调节能力[5-6]。目前,电流环常用的控制方法有滑模控制、PI控制和预测控制等控制方法[7-8]。模型预测电流控制(model predictive current control, MPCC)利用控制系统的信息来预测接下来几个周期时刻的电流增量,再经过价值函数的计算选择最适合的控制值。然而,该方法存在电流脉动和在线计算量较大的问题[9-10]。单矢量MPCC算法简单、响应速度快,但在采样周期中无法改变选择的电压矢量,导致电流的跟踪精度较差[11]。文献[12]采用三矢量MPCC,通过增加电压矢量扩大备选电压矢量的覆盖范围,减小了电流脉动,提高了电流的跟踪精度。但选择合适的电压矢量增加了预测耗时。文献[13]将MPCC转换为模型预测电压控制,省去循环寻优环节,降低预测耗时,但在控制器的设计上难度颇高。文献[14]对三矢量MPCC选择电压矢量的方式进行优化,降低了计算的复杂度和预测耗时,提高了稳态性能。然而,当系统存在参数变化和未建模动态等扰动时,控制精度会显著降低。文献[15]在滑模控制中引入扩张状态观测器(extended state observer, ESO)对扰动估计后补偿给控制器,提高了控制器的鲁棒性。
因此,本文设计了一种基于ESO的PMLSM改进MPCC策略。通过确定最优电压矢量相角和重新划分电压矢量扇区,缩小电压矢量的选择范围,减小系统的预测耗时,有效降低了电流脉动。使用ESO对扰动进行观测,并将其转换为电流对系统进行补偿,以进一步降低电流脉动,提高系统的鲁棒性。最后,实验结果表明所提出控制方法有效地降低了电流脉动和速度的稳态误差,对负载扰动具有抑制作用。
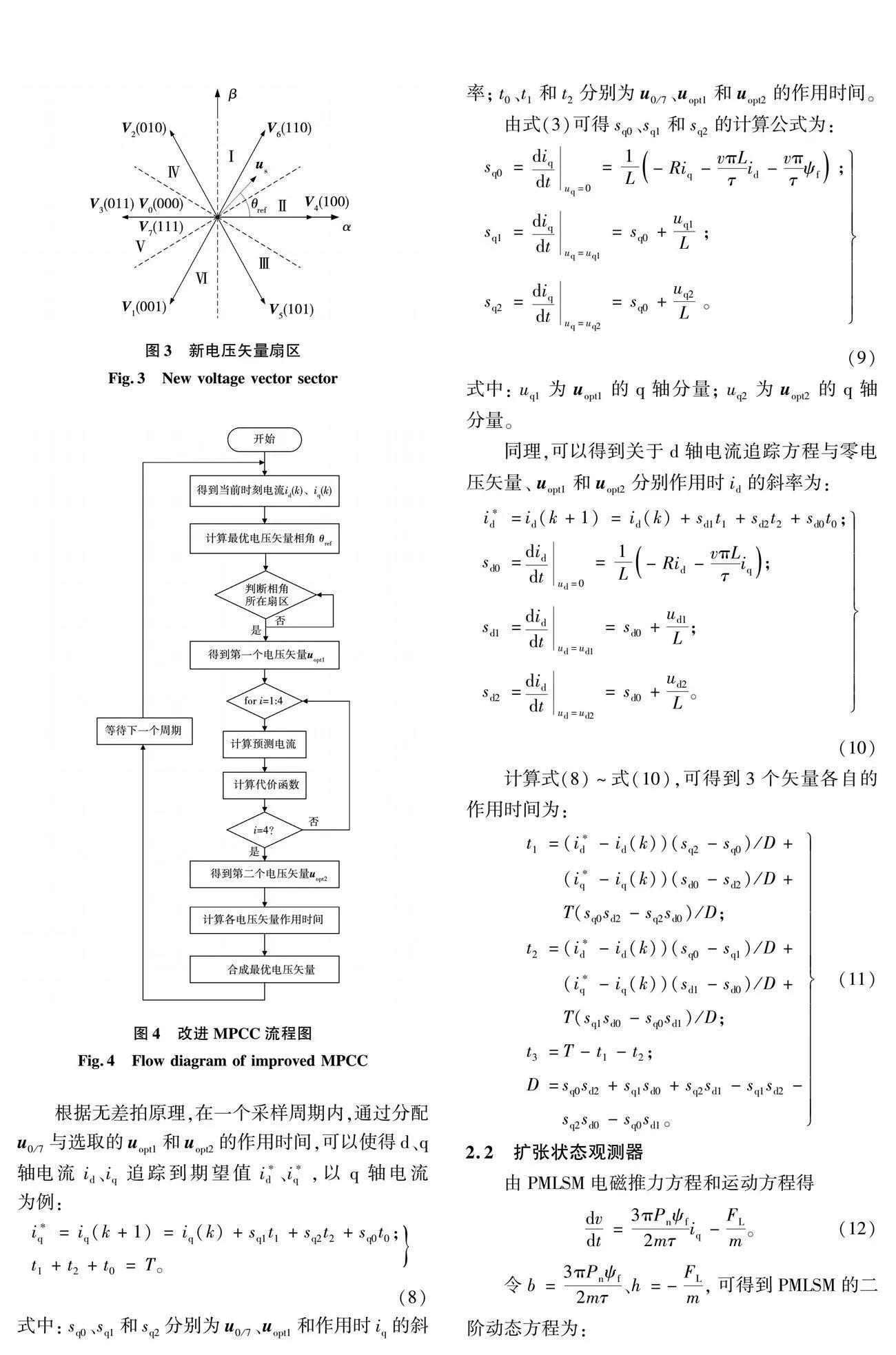
(31)
为了使ESO稳定且误差尽可能小,因此在参数整定时,应尽可能使 , 和 尽可能小,且满足 , 和 需要综合考虑。选择合适 , , 的值,使 实现收敛, 实现收敛于 。ESO将观测的系统内外总扰动转换为等效电流,对速度控制器输出的电流进行补偿,补偿后的q轴电流为
(32)
3 实验结果及分析
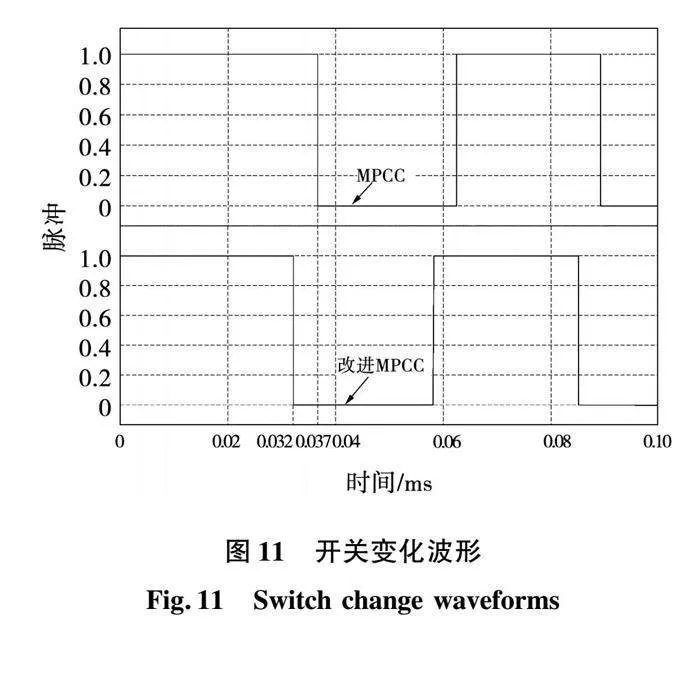
为了验证本文所提出的控制方法的有效性,基于Links-RT实验平台搭建MPCC、改进MPCC和基于ESO的改进MPCC的实验系统,通过Links-BOX模块将设计的仿真模型自动转换为二进制代码,仿真机运行代码控制PMLSM实验电机运行。然而,实际负载难以改变负载大小和模拟负载扰动,Links-RT实验平台利用PMLSM负载电机的反向运动代替实际负载,对实验电机施加实验所需的负载和负载扰动,进行对比分析。实验框图如图5所示。
实验所使用的PMLSM的主要参数如表1所示。3种控制方法下的系统速度环PI控制器的参数及ESO的参数如表2所示。
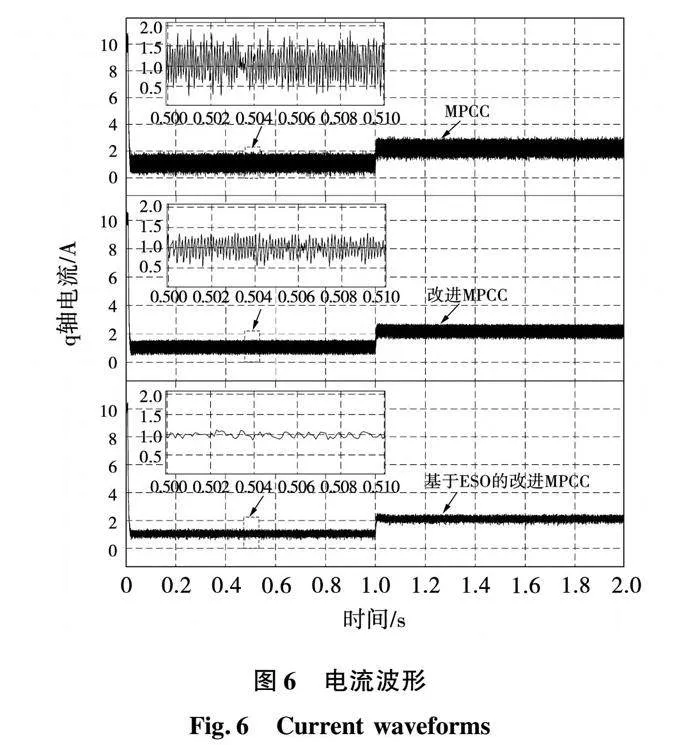
图6由上到下分别为PMLSM在MPCC、改进MPCC和基于ESO的改进MPCC的q轴电流波形图。可以看出,在系统稳定后,MPCC情况下的电流脉动最大,波动范围为0.5~1.6A,在1s时突加 负载,恢复稳定后的波动范围为1.5~2.7A;改进MPCC次之,突加负载前后的波动范围为0.7~1.4A和1.6~2.5A,改进MPCC较MPCC相比,q轴电流脉动得到削弱,说明了改进MPCC的有效性;基于ESO的改进MPCC的电流脉动最小,突加负载前后的波动范围为0.9~1.1A和1.9~2.1A,说明ESO将观测到的扰动转换为电流进行补偿也起到了抑制了电流脉动的作用,进一步减小了改进MPCC的电流脉动,证明了本文所提出的基于ESO的改进MPCC在抑制电流脉动上具有较好的可行性。
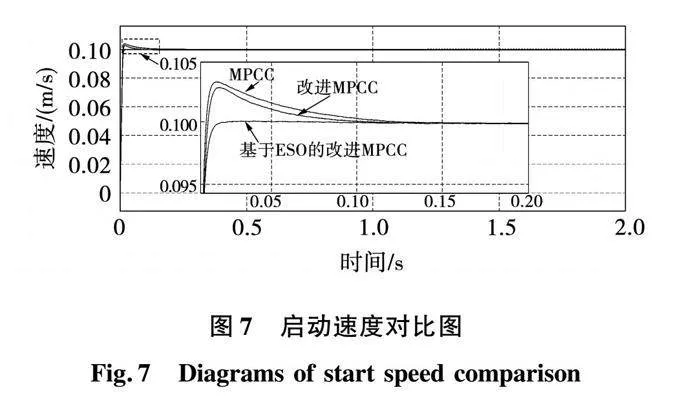
图7为电机给定速度0.1 、带 负载起动时3种控制方法的速度对比图。可以看出,MPCC瞬态响应时间为0.13s,改进MPCC瞬态响应时间减小到0.1s,产生的超调量更小,说明改进MPCC能够减少预测耗时。基于ESO的改进MPCC瞬态响应时间为0.02s,同时实现了无超调启动,证明了本文所提出的基于ESO的改进MPCC在提高动态性能上具有较好的可行性。
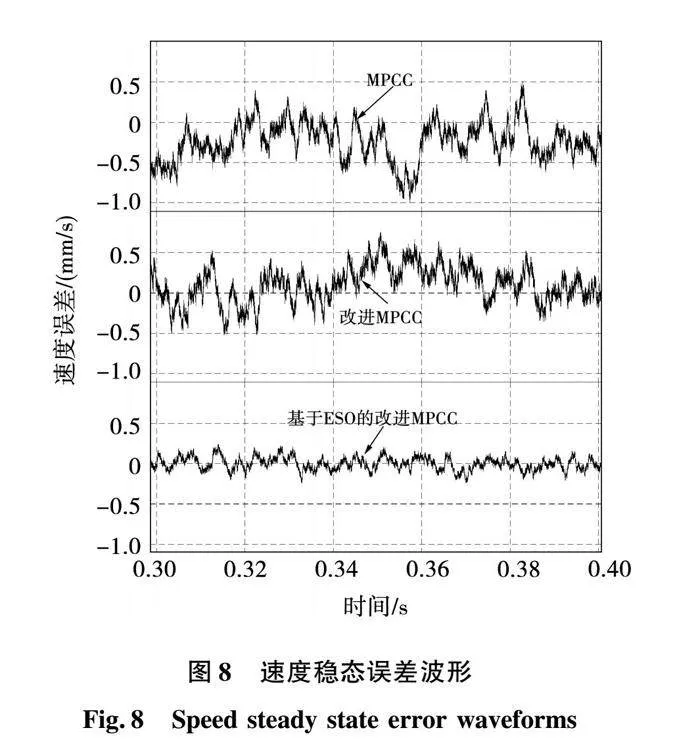
待电机稳定运行之后,3种控制方法在0.3~0.4s的速度稳态误差如图8所示,MPCC下的电机速度稳态误差范围为-1~0.5 ,改进MPCC下的电机速度稳态误差范围为-0.5~0.7 ,基于ESO的改进MPCC下的电机速度稳态误差范围为-0.2~0.2 ,证明了本文所提出的基于ESO的改进MPCC在减小稳态误差具有较好的可行性。
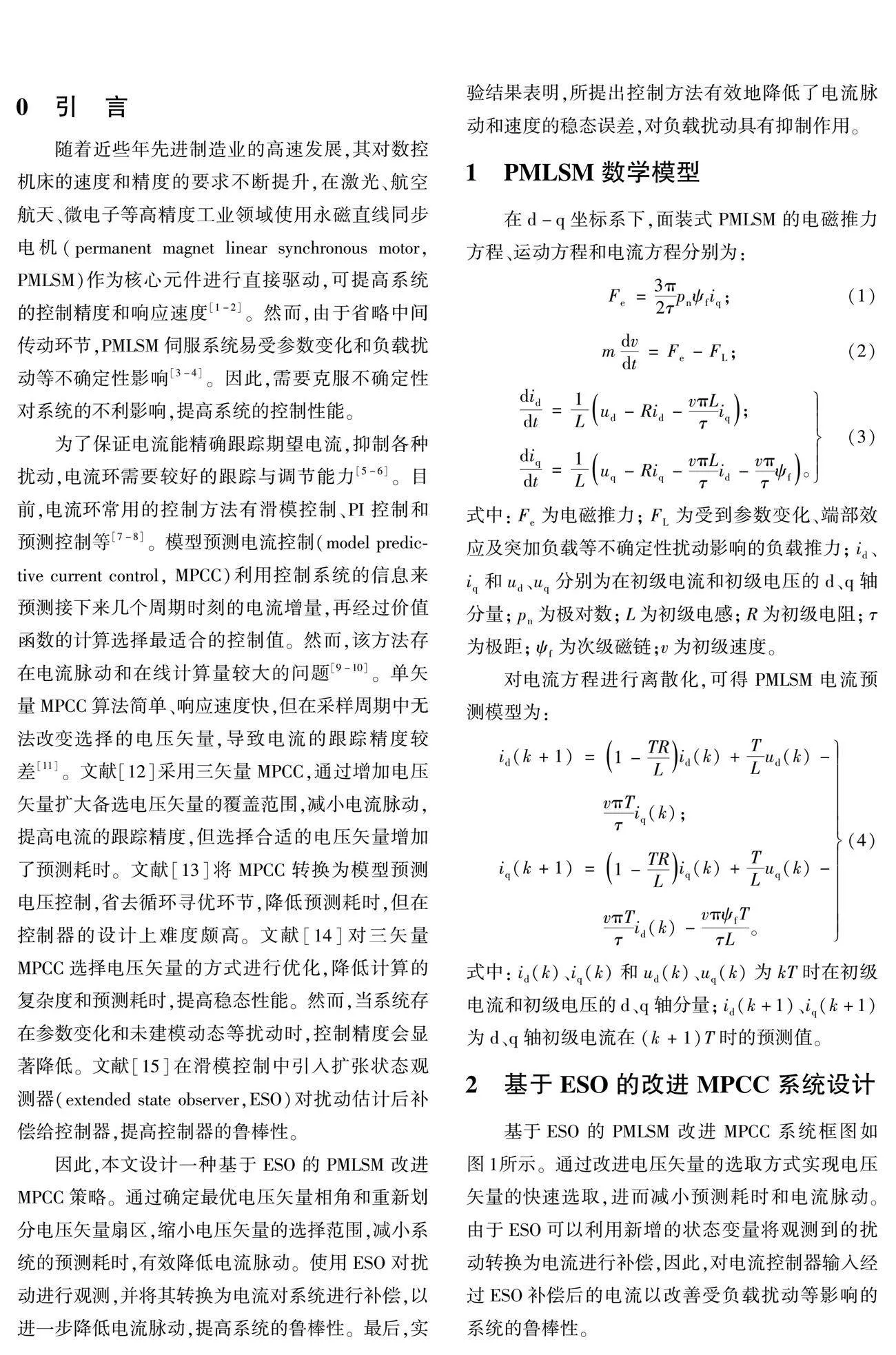
电机带 负载起动时,输入幅值0.1 、频率为0.625Hz的方波信号,3种控制方法的速度跟踪如图9所示,在给定速度改变后,基于ESO的改进MPCC可以实现速度的快速跟踪。
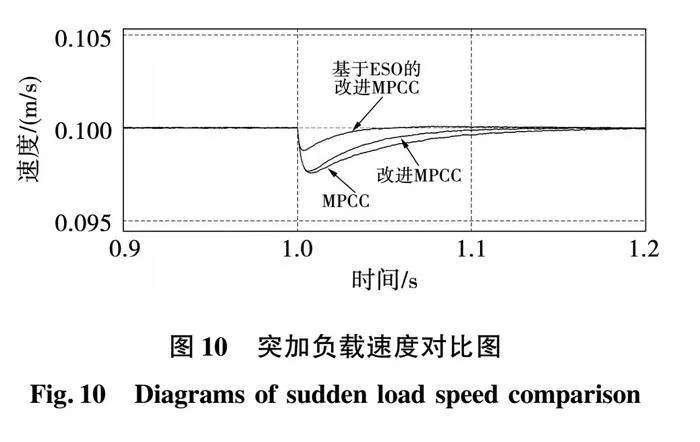
在1s时突加 负载,,3种控制方法下的速度变化如图10所示。可以看出,PMLSM无论是在MPCC下的速度还是在改进MPCC下的速度都产生了较大波动,但是在改进MPCC下的速度恢复到给定值的时间更短,说明提高预测速度无法进一步改进抗负载扰动能力。在系统中引入ESO后,将突加负载看作一个扩张状态量进行在线估计并实时补偿,使得改进MPCC产生的最大跟踪误差减小。同时,速度可以在1.05s恢复到0.1 ,提高了系统的鲁棒性。
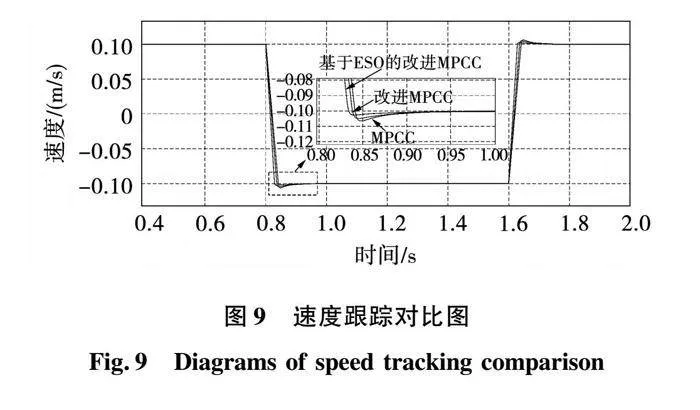
图11为PMLSM在起动后的0.1ms内开关的变化波形。可以看出,MPCC下的开关在0.037ms时改变开关状态,改进MPCC下的开关在0.032ms时改变开关状态,说明改进MPCC在起动后发生开关状态改变所需的时间更短,其可以更快得出开关状态的变化情况,即改进MPCC的计算量更少。
4 结 "论
为了提高PMLSM直接驱动的控制性能,设计了一种基于ESO的改进MPCC方法,通过最优电压矢量相角和重新划分后的电压矢量扇区改进模型预测电流控制器,同时,采用ESO对扰动进行估计,并产生电流对系统进行补偿。实验结果表明:
1)与MPCC相比,改进MPCC可以实现电压矢量的快速选取,减小计算复杂度和电流脉动。
2)ESO对电流进行补偿进一步减小了电流脉动,同时提高了系统的动态性能和稳态性能。
3)在负载与速度突变时,基于ESO的改进MPCC具有较强的鲁棒性。
参 考 文 献:
[1] LIN C H. Linear permanent magnet synchronous motor drive system using AAENNB control system with error compensation controller and CPSO[J]. Electrical Engineering, 2020, 102(5): 1311.
[2] 汪凤翔, 何龙. 永磁直线电机快速终端滑模预测电流控制[J].电机与控制学报, 2023, 27(6):160.
WANG Fengxiang, HE Long. Fast terminal sliding mode predictive current control for permanent magnet linear motor [J]. Electric Machines and Control, 2023, 27(6): 160.
[3] 周华伟, 于晓东, 刘国海, 等. 基于内模的圆筒永磁直线电机滑模速度控制[J]. 中国电机工程学报, 2019, 39(11): 3382.
ZHOU Huawei, YU Xiaodong, LIU Guohai, et al. Sliding mode speed control for tubular permanent magnet linear motors based on internal model[J]. Proceedings of the CSEE, 2019, 39(11):3382.
[4] 唐友亮, 张锦, 李守军. 数控机床进给系统三电平直线电机模型预测转矩控制[J]. 大电机技术, 2022, 3: 42.
TANG Youliang, ZHANG Jin, LI Shoujun. Model predictive torque control of three-level linear motor based on feed system of CNC machine tool [J]. Large Electric Machine and Hydraulic Turbine, 2022, 3: 42.
[5] 刘川, 朱非甲, 马伟, 等. 直线电机的线性自抗扰控制[J]. 电机与控制学报, 2013, 17(1): 71.
LIU Chuan, ZHU Feijia, MA Wei, et al. Linear auto disturbance rejection control of linear motor [J]. Electric Machines and Control, 2013, 17(1): 71.
[6] 吕刚. 直线电机在轨道交通中的应用与关键技术综述[J]. 中国电机工程学报, 2020, 40(17): 5665.
LV Gang. Review of the application and key technology in the linear motor for the rail transit[J]. Proceedings of the CSEE, 2020, 40(17): 5665.
[7] YIN Zhonggang, GONG Lei, DU Chao, et al. Integrated position and speed loops under sliding-mode control optimized by differential evolution algorithm for PMSM drives[J]. IEEE Transactions on Power Electronics, 2019, 34(9): 8994.
[8] XU Yanping, DING Xianhua, WANG Jibing, et al. Robust three-vector-based low-complexity model predictive current control with super-twisting algorithm-based second order sliding mode observer for permanent magnet synchronous motor[J]. IET Power Electronics, 2019, 12(11): 2895.
[9] SUN Xiaodong, WU Minkai, LEI Gang, et al. An improved model predictive current control for PMSM drives based on current track circle[J]. IEEE Transactions on Industrial Electronics, 2021, 68(5): 3782.
[10] JIANG X, YANG Y, FAN M, et al. An improved implicit model predictive current control with continuous control set for PMSM drives [J]. IEEE Transactions on Transportation Electrification, 2022(2): 2444.
[11] 李盛培, 罗亮, 刘知贵. 永磁同步直线电机伺服控制系统研究与设计[J]. 机械设计与制造, 2015(8): 143.
LI Shengpei, LUO Liang, LIU Zhigui. Research and design of permanent magnet synchronous linear motor servo control system[J]. Mechanical Design and Manufacturing, 2015(8): 143.
[12] 徐艳平, 王极兵, 张保程, 等. 永磁同步电机三矢量模型预测电流控制[J]. 电工技术学报, 2018, 33(5): 980.
XU Yanping, WANG Jibing, ZHANG Baocheng, et al. Three vector model predictive current control of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society, 2018, 33(5): 980.
[13] 王萌, 施艳艳, 沈明辉, 等. 三相电压型整流器模型电压预测控制[J]. 电工技术学报, 2015, 30(16):49.
WANG Meng, SHI Yanyan, SHEN Minghui, et al. Model voltage predictive control of three-phase voltage source rectifier[J]. Transactions of China Electrotechnical Society, 2015, 30(16): 49.
[14] 周立, 尚治博, 谢磊, 等. 永磁同步电机三矢量优化预测电流控制[J]. 电力电子技术, 2022, 56(6): 49.
ZHOU Li, SHANG Zhibo, XIE Lei, et al. Three vector optimal predictive current control of permanent magnet synchronous motor[J]. Power Electronics Technology, 2022, 56(6): 49.
[15] JIANG Junfeng, ZHOU Xiaojun, ZHAO Wei, et al.A fast integral sliding mode controller with an extended state observer for position control of permanent magnet synchronous motor servo systems[J]. Frontiers of Information Technologyamp;Electronic Engineering, 2020, 21(8): 1239.
(编辑:邱赫男)
