新能源汽车轮毂电机协同控制
2024-08-05朱一男温泉李志平元燚范晓松


关键词:多轮毂电机系统;虚拟总轴;总量协同一致;控制器
中图分类号:U461.6 文献标识码:A
项目基金:2022年湖南省教育厅科学研究项目《新能源汽车轮毂电机协同控制研究》(课题编号:22C1490)。
0引言
电机控制技术被称为新能源汽车关键三电技术之一。随着新能源汽车技术的发展,驱动电机技术水平得到了很大提升。轮毂电机技术则属于驱动电机技术的一种。轮毂电机采用独立驱动,各轮毂电机均可以根据车辆行驶情况随时进行切换,以适应不同工况需求[1]。
近年来,关于轮毂电机技术的研究取得了大量成果。在提高车辆舒适性与操稳性方面,江洪等建立了由轮毂电机模型和空气悬架模型组成的九自由度车辆系统模型,并提出了基于模型预测控制理论的半主动悬架控制方法[2]。王拓等设计的控制器不需要对自动导引运输车进行建模,只需要控制系统的输入和输出数据[3]。在分布式电机驱动控制策略方面,吴伟斌等应用电子差速控制策略,设计了一种轮毂电机驱动、带电子差速转向的轮式运输车,解决了丘陵山地果茶种植户的实际运输问题[4]。肖祥慧等提出了一种基于模型预测控制器的分布式驱动扭矩分配系统,提高了分布式驱动电动汽车的稳定性[5]。在一体化扭矩控制方面,李以农等基于模糊滑模控制的稳定性控制器,有效提高轮边驱动电动汽车的行驶稳定性[6]。本文采用了一体化扭矩控制方式,通过主动控制车轮的扭矩分配来提高车辆的稳定性。
本研究通过研究轮毂电机的协同控制策略,可对轮毂电机的主要部件进行集成和优化,实现轻量化;能促进新能源汽车关键技术朝着电子化发展,加速智能化。而虚拟总轴控制策略属于智能控制策略的一种,由于其结构简明、协同效率高以及抗干扰能力强,在实际工程项目中得到了普遍应用[7]。故本文设计基于虚拟总轴的总量一致控制策略,采用积分滑模的控制方法,使误差收敛到零。
1基于虚拟总轴的多轮毂电机总量一致控制框图
基于虚拟总轴的多轮毂电机总量一致控制策略的设计目的为:当某一轮毂电机空转/打滑时,为保证轮毂电机系统的协同,设计智能控制决策反馈调节特性能迅速感知此故障,并快速调节受阻电机的转速;设计虚拟跟踪控制器和协同控制器,使轮毂电机系统在振荡过程中能维持动态平衡。
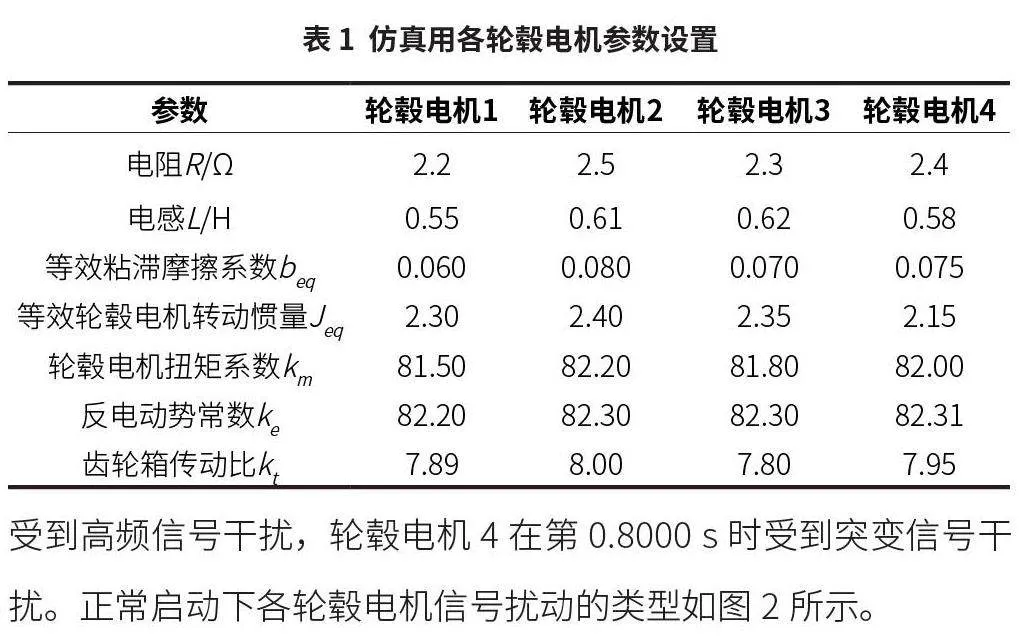
基于虚拟总轴的多轮毂电机协同控制框图如图1所示。该系统由目标信号、虚拟总轴、轮毂电机系统和多轮毂电机协同控制策略组成。在某轮毂电机空转/打滑的情况下,相应轮毂电机的输出电压将会发生变化。
将所有轮毂电机的电压之和实时反馈至虚拟总轴,虚拟总轴则可通过调节总电压来调节轮毂电机的总扭矩,确保所有轮毂电机的总扭矩动态跟踪参考扭矩,可表示如下:
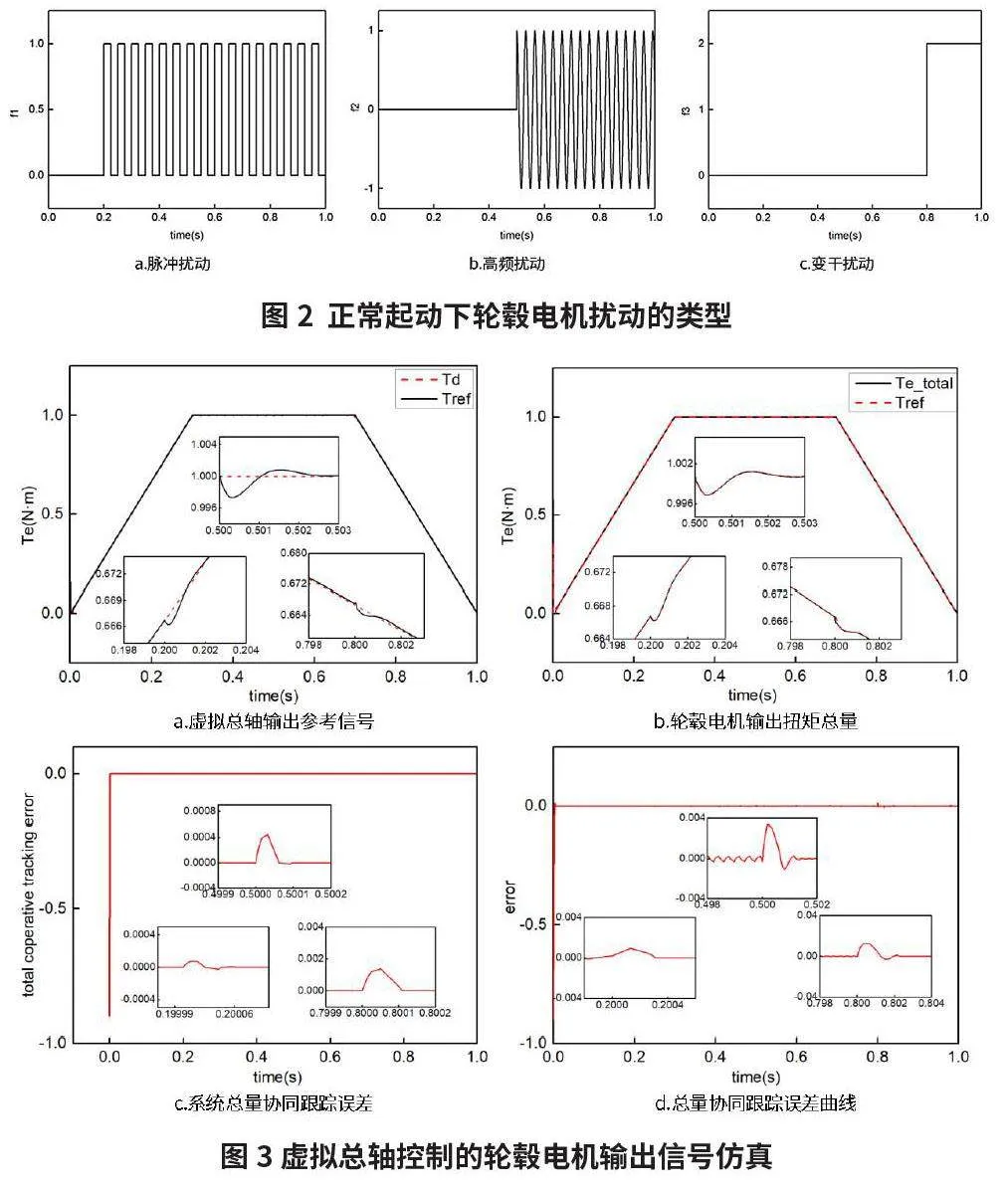
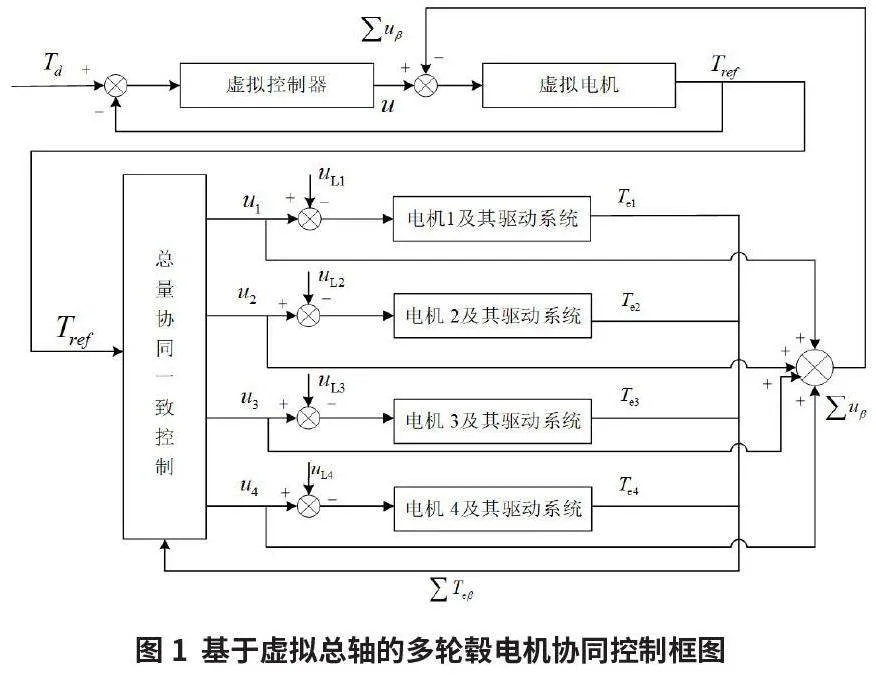
进一步探索在给定系统参考指令和不确定突发扰动下,虚拟总轴控制的每个轮毂电机总输出扭矩的协同跟踪性能。图3a所示为虚拟总轴调节输出的多轮毂电机系统参考扭矩曲线,可以看出,虚拟总轴的输出扭矩能够动态跟踪系统给出的参考扭矩。在加速运动过程至0.2000s时,若轮毂电机2突发空转/打滑,虚拟总轴将各轮毂电机扭矩牵引至稳态值,整个过程可在0.0020s内完成。在匀速运动过程至0.5000s时,若轮毂电机3突发空转/打滑,系统能在0.0020s内完成虚拟总轴输出扭矩先下降后回升的动态过程。在减速运动过程至0.8000s时,若轮毂电机4突发空转/打滑,系统能在0.0020s内完成相应的动态过程。
图3b所示为轮毂电机的输出总扭矩动态跟踪过程,红色虚线表示虚拟总轴输出的参考信号,黑色实线表示轮毂电机的总输出扭矩。可以看出,系统可保持动态跟踪性能。
图3c所示为多轮毂电机系统协同跟踪误差,可以看出,跟踪误差出现在系统发生扰动时,虚拟总轴调节使得系统总扭矩恢复至给定值的过程中,跟踪时间为0.0001s。
图3d所示为多轮毂电机系统协同跟踪误差曲线,可以看出,当系统经历不确定扰动时,会出现跟踪误差,但系统调整时间为0.0020s。
从仿真结果可以看出,多轮毂电机系统在参数扰动下仍具有良好的鲁棒性,且仿真波形与理论分析一致。
6结束语
本文提出了一种基于虚拟总轴的多轮毂电机协同控制策略,该策略依托虚拟总轴的反馈特性和积分滑模控制算法,在车辆运行过程中动态调整轮毂电机的总扭矩。最后,以轮毂电机系统为仿真对象,验证了该策略具有良好的鲁棒性和协同跟踪性能,缩短了轮毂电机系统动态过程所需的时间,提高了系统的动态性能。
作者简介:
谌雪媛,硕士,讲师,研究方向为机电系统和工业过程控制。