基于噪声数据驱动CNN和LSTM的罐道故障诊断
2024-07-17马利芬王伟池耀磊朱宏伟韩磊


















摘 要:刚性罐道是立井采矿中煤炭运输以及设备运输环节的重要组成机械,对罐道做出精确的故障诊断具有保证和提高立井采矿生产效率的重要意义。面对罐道难以实现精确故障诊断的问题,在Improved Convolution Neural Networks withTraining Interference (ITICNN) 的基础上添加了Inception_v4 与Long Short Term Memory (LSTM),提出了一种高精度卷积神经网络———Improved Convolution Neural Network Based on ITICNN (IBICNN),并采用了一种方向振动传感器收集罐道振动信号,用IBICNN 的卷积层提取振动信号数字特征,并用LSTM 提取多方向振动信号之间的相关性信息的刚性罐道故障诊断方法。通过搭建实验平台对罐道实验模型进行了故障诊断研究,取得了99. 4% 的诊断率。为了解决罐道在使用过程中伴有大量噪声从而难以诊断故障的问题,在Adaptive Batch Normalization (AdaBN) 算法的基础上进行了改进,并采取自迁移学习的方法,提高了IBICNN 的抗噪声能力,在噪声含量为100% 的情况下取得了90. 11% 的诊断率。
关键词:罐道;故障诊断;IBICNN;LSTM;AdaBN
中图分类号:TP277 文献标志码:A 开放科学(资源服务)标志码(OSID):
文章编号:1003-3106(2024)04-1043-10
0 引言
随着我国经济建设发展,煤矿资源得到了广泛开发,我国井下采矿矿场越来越多,因此立井提升运输设备得到了大量的应用[1]。罐笼是井下采矿工程中的主要提升运输设备,其主要功能是将地底的煤、机械和人员提升至地面,因此罐笼的安全稳定运行影响着采煤效率。刚性罐道作为罐笼的运行轨道,出现故障损伤时将影响到罐笼的安全与稳定运行。在采矿作业中由于机械振动、高腐蚀的环境往往引起罐道的损伤,当罐道发生故障时在不影响罐道使用的情况下对罐道提前做出故障诊断,对罐笼的使用具有重大安全意义[2]。
传统的罐道故障诊断方法有傅里叶变换[3]、小波变换[4]、线性对应和模态分解[5]等,在罐道发生故障时,根据加速度传感器采集到的振动数据的时域频域特征,进行有监督的特征提取与分析从而识别出故障类型[6]。虽然传统方法对罐道进行故障诊断比较直观便于专业人员进行分析,但面对工况复杂、故障类型较多、故障数据较多以及噪声干扰较大的问题时难以做出快速高效的故障诊断[7]。
随着深度学习理论的不断发展,各种神经网络被广泛应用于机械[8]、土木[9]和采矿[10]等各个领域[11]。张仲杭等[12]提出了一种基于纹理图像与卷积神经网络的轴承故障诊断方法,该方法将震动数据转换成纹理图像从而增加神经网络的输入尺度,进而增强了轴承故障诊断的精度。蔡超志等[13]提出了一种基于搭载Inception 模块的卷积神经网络对齿轮箱进行了故障诊断研究,研究结果表明在神经网络中加入Inception 模块可以提升网络的抗噪声能力和诊断精度,但其采用的Inception_v1 较为陈旧,性能提升有限。随后蔡超志等[14]在TICNN基础上采用了Inception 替换小卷积层,进而提出了一种高精度的卷积神经网络———ImprovedConvolution Neural Networks with Training Interference(ITICNN)用于框架结构故障诊断研究并将该模型命名为BICNN,研究结果表明BICNN 不仅具备超高诊断精度而且具备较强的抗噪声能力。此外,神经网络具有强大的自适应特征提取能力与分类能力,因此本研究采取数据驱动的方法,在ITICNN 的基础上加入Inception_v4[15]和Long Short Term Memory(LSTM)[16],提出了一种分类精度较高的卷积神经网络———Improved Convolution Neural Networks withTraining Interference(IBICNN)。本研究采取IBICNN中的卷积层提取振动信号数字特征,用LSTM 提取加速度传感器X、Y、Z 三个方向组合信号之间的相关性特征的综合特征提取方法进行罐道故障诊断研究,对罐道的安全与稳定使用具有重大工程意义。为了对噪声环境中的罐道做出精确的故障诊断,本研究使用带噪声的数据训练IBICNN,从而提高IBICNN 对噪声的容纳范围,并使用自迁移学习的Adaptive Batch Normalization(AdaBN)[17]方法,冻结BN 层参数,将带噪声振动数据作为源域进行正向传播训练,从而消除BN 层参数在源域和目标域形成相互独立的关系,达到进一步提升抗噪声能力的目的。
1 数据采集与增强
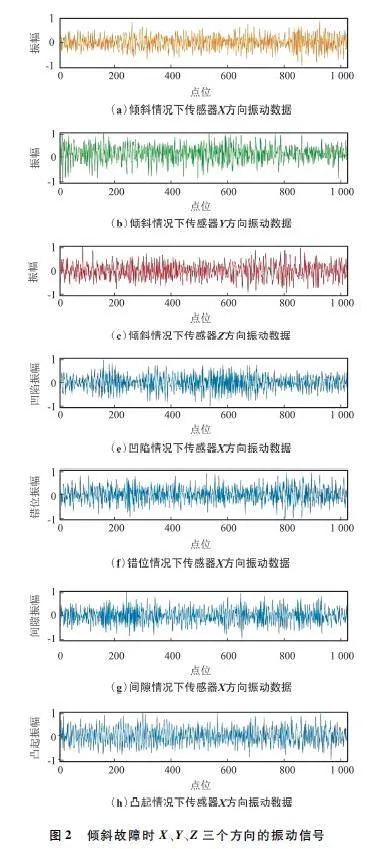
采取深度学习方法对罐道进行故障诊断时,采集数据位置的便利性尤为重要,选择合适的位置不仅便于安装传感器,而且在罐道发生故障时便于快速地进行故障诊断,因此在实验过程中将加速度传感器放置在罐道顶端,由此来对应实际使用过程中罐道的顶部数据采取较为方便的特征,进而更加快速与准确地做出故障诊断。本实验模拟了罐道在使用过程中的发生率最高的故障,包括倾斜、凸起、凹陷、错位和间隙5 种故障类型。数据采集方式为每一次在罐笼开始提升时加速度传感器采集不同方向的振动信号。实验装置与故障原理如图1 所示,图中①为加速度传感器,②为提升装置,③为罐道。
本实验所采取的加速度传感器可以收集来自X、Y、Z 三个方向的振动数据,所采集振动数据如图2所示。
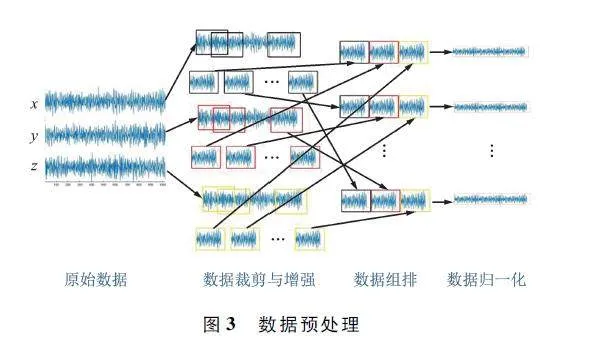
为了方便观察,本研究采取了1 024 个点位进行了绘制。由图2 可以看出,在时域内同一种故障情况下加速度传感器采集到的3 个方向的振动信号虽然不同,但振幅区间相同,不同故障情况下采集到的同一方向振动信号凌乱程度具有较大差异。使用单一方向的震动数据进行故障诊断可以提取的特征数量有限,因此本研究采取对同一种故障的3 个方向的振动数据先进行数组增强保持其在数据增强中具有相同的步长,并且保持每个方向增强后的样本顺序不变,然后将每个方向的数据进行依次组合,最后将组合数据进行归一化,其原理如图3 所示。
经过衔接后的数组中具有不同方向的特征,因此使用神经网络对其训练可以提取到更加丰富的特征信息。在数据增强过程中,滑动窗口数据增强法因其本身高度的灵活性受到广大研究学者的青睐,通过设置窗口的长度l 获得样本数据的长度,设置滑动步长b 可控制样本的数量,b 的值越小得到的样本重复性越高。滑动窗口数据增强原理如下:
式中:N 为数据增强后的样本数量,L 为源数据点位数量。从式中可以看出,滑动窗口越大则会导致样本数量越少,滑动步长b 越小则得到的样本数量越多,b = 1 时可获取最多的样本数量为L-l。
数据归一化有利于提升卷积神经网络的训练速度,并可以提升卷积神经网络的收敛速度与训练精度。振动数据归一化常用的方法有线性归一化以及零均值归一化,线性归一化和零值归一化往往忽略振动信号中的负幅值,因此导致部分特征丢失,本研究将2 种方法结合起来对振动信号进行正负值归一化,正负值归一化原理如下:
式中:xi 为样本x 中的第i 个点位的数值,yi 为样本第i 个点位归一化的数值。经过式(2)可以将样本x 的点位全部归一化到[-1,1],相当于将振动数据进行了等比例还原,因此保留了振动数据的负值特征。
2 罐道故障诊断流程
罐道往往被运用于噪声较大的采矿运输场所[18-19],因此使用卷积神经网络对罐道进行故障诊断研究要求其具备良好的抗噪声能力。使用不带噪声的振动数据训练出来的卷积神经网络具备一定的抗噪声能力,但泛化能力较低。为了提高卷积神经网络本身的抗噪声能力,本研究采取带一定噪声的数据训练神经网络,从而提高卷积神经网络的抗噪声能力上限。本研究罐道故障诊断流程如图4所示。
首先将数据划分成训练集、测试集和验证集,使用不带噪声的训练集和测试集训练基于AdaBN 的卷积神经网络,生成模型并保存。随之往验证集中逐步按照百分比添加10% ~ 100% 间隔为10% 的噪声,并用不带噪声数据训练出来的模型对带噪声的验证集进行分类,当分类结果准确率小于等于90%且大于等于80% 时停止添加噪声,依次探究出网络模型最大的抗噪声能力。将模型可承受的最大噪声添加至训练集和测试及并用于训练卷积神经网络,从而得出抗噪声能力更强势的卷积神经网络模型。此外,往训练数据中添加合适的噪声去训练卷积神经网络,相比于传统使用无噪声信号训练卷积神经网络的方法,可容纳噪声范围得到了增加,从而有利于高噪声情况下罐道的故障诊断。
2. 1 卷积神经网络
卷积神经网络的性能往往取决于感受视野的大小和参数量,2022 年池耀磊[20]在ITICNN 的基础上加入了Inception 模块提出了精确度较高的BICNN,但其输入样本数据较短,在卷积神经网络末端生成的特征参数量过低,因此在网络训练过程中损失函数值变化较大。为了对罐道做出精确的故障诊断,本研究在BICNN 的基础上沿用了第一个卷积层为16 通道、卷积核大小为64、步长为16 的结构,使得卷积神经网络具备较高的感受视野,并将原有的样本输入数据由1 024 增加为3 072,从而提高网络末端的特征数量,此外将原有的Inception_v1 升级至Inception_v4,使得BICNN 增加了一个1×1 卷积的尺度并降低整体的参数量,从而得到IBICNN 结构。本研究所用的卷积神经网络如图5 所示。
IBICNN 首先由卷积核为64 的大卷积层对振动数据进行特征提取,第一层卷积的感受视野即为卷积核的尺寸,因此IBICNN 第一个卷积层可提取到较多的特征信息;其次,IBICNN 的第二个卷积核尺寸为32,用于细化提取第一层卷积输出的特征参数;随后,使用了5 组Inception_v4 结构,Inception_v4 中存在4 个尺度的卷积,且卷积核大小均不相同,从而可以提取到更加丰富的特征参数。
2. 2 LSTM
IBICNN 在训练过程中卷积核仅仅提取当前区域的特征信息,因此忽略了前后卷积区域的相关性信息。此外,本研究采取了数据拼接,卷积层仅仅可以提取到每段信号的独立信息,难以捕捉到拼接数据与数据之间的特征关系,因此在本研究在全连接层位置加入2 层LSTM 用于提取特征与特征之间的特征关系。LSTM 逻辑如图6 所示。
图6 为一个LSTM 单元,经过组合形成整体LSTM 层,xt 为t 时刻的输入数据,ht 为经过LSTM后的输出数据。LSTM 的更新公式如下:
it = σ(Wi[ht-1 ,xt]+bi), (3)
ot = σ(Wo [ht-1 ,xt]+bo ), (4)
ft = σ(Wf[ht-1 ,xt]+bf), (5)
Ct = ft ⓧCt-1 +it ⓧtanh(Wc [ht-1 ,xt]+bc ), (6)
ht = ot ⓧtanh(Ct), (7)
式中:Wi、Wo、Wf 分别表示输入门、输出门、遗忘门的权重系数,bi、bo、bf 为偏置矢量。通过这样的门结构,使得LSTM 神经网络结构具有了保持长期储存信息的能力,有效增加了记忆的长度,适用于提取组合信号之间的相关性特征提取。
2. 3 网络参数
改进后的IBICNN 参数如表1 所示。
3 AdaBN
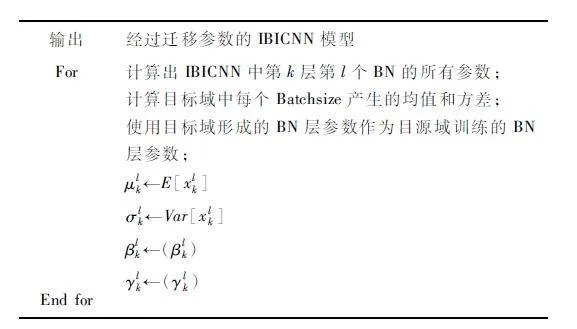
AdaBN 的原理为使用一个卷积神经网络训练形成的BN 参数去替换掉另一个神经网络的BN 参数,从而防止神经网络的训练集和测试集在训练过程中BN 层的均值和方差在空间领域分布为相互独立,进而使得模型的泛化能力和鲁棒性大大提高。AdaBN 算法的实现需要将IBICNN 在目标领域训练的BN 层局部参数替换掉IBICNN 在源领域训练所产生的BN 层的参数。本文在传统AdaBN 算法的基础上将BN 层所需要替换的参数提升为4 个,即进行整个BN 层参数替换,从而降低了AdaBN 算法的实现难度。AdaBN 算法如图7 所示。
AdaBN 的具体实现方式为:首先,将数据分为等比例的训练集和测试集,先用训练集训练IBICNN,训练过程中再次进行7 ∶ 3 数据划分,使得IBICNN 在训练过程中进行正向和反向传播并保存训练好的模型;然后,使用训练集的数据进行迁移学习,在迁移IBICNN 模型过程中冻结所有BN 层,使得BN 层不进行参数学习,同时在迁移学习的过程中只做正向传播不做反向传播;最终,保存迁移学习训练好的模型用于故障诊断。AdaBN 算法流程如图8 所示。
4 神经网络训练
本文本在一台处理器为Corei78750H,GPU 为NVIDIA GTX1050ti4G,内存16 GB 的笔记本上运行IBICNN,噪声来源为Tensorflow 中的numpy 函数模拟产生的高斯白噪声。将不带噪声的数据输入到IBICNN 的训练结果如图9 所示。
由图9 可以看出,在源域和目标域的训练过程中精确率值最终均稳定在100% 左右,但目标域的目标函数值在训练170 ~ 200 次的跳跃程度明显高于源域,由此可以说明源域训练神经网络稳定性更高。训练达到200 次时聚类结果如图10 所示。
由图10 可以看出,目标域的训练结果虽然可以将5 种故障数据分离,并且每种故障均收缩,但每种故障之间的距离接近,当信号中存在噪声因素时会导致故障误判。源域训练结果可以将5 种故障数据完全分开各自归拢,且故障数据与故障数据之间均存在较大的距离,因此当数据中含有一定的噪声时,对源域训练结果影响较低。
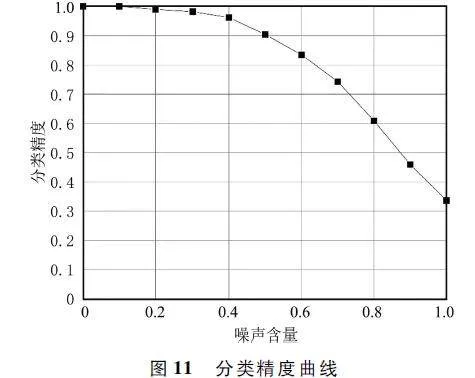
使用保存的IBICNN 模型对带不同程度噪声的验证集数据进行故障分类,得到的分类精确度如图11 所示。
由图11 可以看出,当验证集中噪声含量达到50% 时,诊断精度降低到90% ,因此在原始数据中加入50% 噪声用于训练最终IBICNN 模型。训练结果如图12 所示。
对比图12 和图9 可以看出,往数据中加入50% 噪声后IBICNN 的目标域训练曲线更加粗糙、跳跃度更加明显,但整体仍然趋于收敛,同时可以看出IBICNN 源域训练受噪声的影响不大,训练曲线趋于一致,但加入噪声后使得目标函数值发生高频率的跳跃。单方面地分析训练曲线难以看出模型是否具备分类条件,因此引入混淆矩阵和Tsne 可视化,结果如图13 所示。
由图13 可以看出,数据中加入50% 噪声后,故障数据中存在2% 的情况4 被判断成情况5,1% 的情况5 被判断成情况4,但聚类结果中各种故障情况依旧各自归拢且故障情况之间存在一定的距离,说明生成的模型仍然可以做出有效的故障诊断。通过混淆矩阵可计算出训练的精确率,计算如下:
式中:TP 为预测成正的样本数量,TN 为预测成负的样本数量,TP+TF+FP+FN 为所有样本数量。
5 消融实验
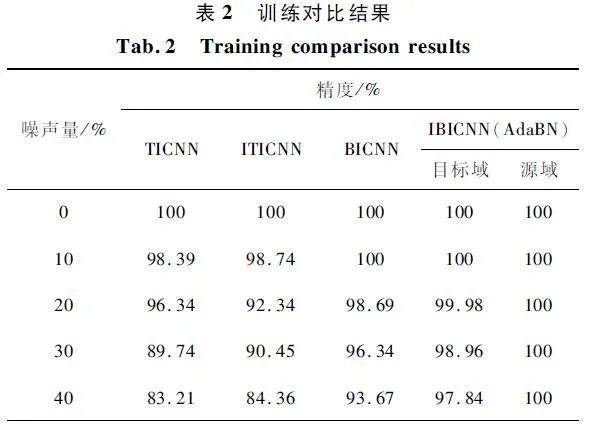
当振动数据中存在50% 噪声时,通过图13 中的混淆矩阵可计算出本研究所提出的方法精度可以达到99. 4% ,为了探究本研究所改进网络中各个组成部分的效果,使用TICNN、ITICNN、BICNN 以及IBICNN(AdaBN)对带有不同噪声的振动数据进行训练,经过对比训练结果曲线的精度分析出各个改进机制的作用。训练对比结果如表2 所示。
对比表2 中ITICNN 和BICNN 可以看出,BICNN在噪声含量为10% 时,精度高于ITICNN 1. 26% 左右,同时BICNN 的训练结果曲线显示精度均高于ITICNN,由此说明使用Inception 模块可以增强卷积神经网络的特征识别能力;对比BICNN 和IBICNN的目标域训练结果可以看出,IBICNN 目标域训练结果曲线精度均大于BICNN,由此可以说明本研究采用的Inception_v4 识别精度高于Inception_v1;对比IBICNN 源域和目标域精度,由于IBICNN 的源域训练仅仅进行正向传播,从而导致源域的训练精度远高于目标与训练精度,同时可以说明采取AdaBN 算法可以提高网络训练的精度。经过对比分析结果可以得出本研采取Inception_v4 以及AdaBN 算法改进BICNN 可以提高网络的识别能力的结论。
6 抗噪声能力测试
使用带噪声数据训练的IBICNN 模型对加入不同程度噪声的验证集进行分类,分类精度曲线如图14 所示。
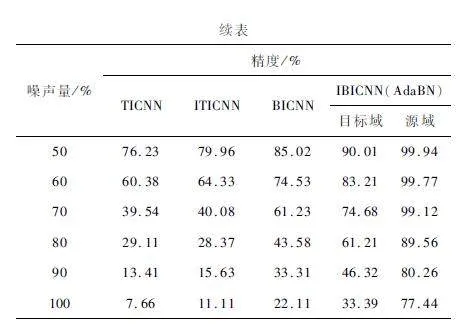
由图14 可以看出,当源数据中含有60% 噪声时分类精确度可以达到100% ,数据中含有100% 噪声时分类精确度仍然可以达到90% ,满足使用要求。对比图9 和图12 说明本研究所使用的方法可以大大提高故障诊断过程中的诊断精度。通过往验证集数据中添加不同含量的高斯白噪声,将SVM、MLP、TICNN、ITICNN、BICNN 以及本研究所提出方法的故障诊断的抗噪声能力做对比,对比结果如表3 所示。
由表3 可以看出,传统机器学习方法的SVM 诊断精度较低且精度降低速度较快,当数据中噪声含量达到一定程度后诊断精度值变为1. 11% ,不再变化,说明网络已经完全丧失分类能力。对比TICNN、ITICNN、BICNN 以及本研究所提出的方法可以看出,网络结构越复杂得到的抗噪声能力越强,当噪声含量达到60% 时本研究所提方法仍然可以得到100% 的诊断率,当噪声含量达到100% 时,本方法可以做出精度为90. 11% 的故障诊断,由此说明本研究所提出方法具有较强的抗噪声能力和较高的诊断精度。
7 结束语
本研究采取了多轴加速度传感器数据拼接的数据预处理方法,并在ITICNN 基础上提出了一种高精度的IBICNN 卷积神经网络,并利用AdaBN 算法,将IBICNN 训练集与测试集的BN 层参数达到完全相互独立,从而提升网络本身的抗噪声能力。此外,本研究采取了往罐道故障数据中逐步添加噪声,当模型仍然可以做出90% 诊断率时,将噪声添加进训练数据再次训练IBICNN,从而得到使用噪声数据训练出来的模型对噪声环境下的罐道数据进行故障诊断。研究结果表明,当数据中含有60% 噪声时使用本研究所提出的方法仍然可以达到100% 的诊断率,当数据中噪声含量达到100% 时仍然具备90. 11% 的诊断精度。所提出的方法可用于噪声环境下的罐道故障诊断,对罐道的使用具有重大安全意义。
参考文献
[1] 吴波. 立井提升刚性罐道系统健康监测研究[D]. 徐州:中国矿业大学,2019.
[2] 季华,肖兴明,刘正全. 罐道测试平台的设计[J]. 煤矿机械,2007(11):25-27.
[3] 郏豪,尚啸,张强. 航空发动机振动数据稀疏傅里叶变换分析[J]. 现代机械,2023(1):54-59.
[4] 黄姗姗,李志农. 基于高密度小波变换的航空发动机滚动轴承故障诊断方法[J]. 轴承,2023(2):19-25.
[5] 邹宁,金杨超,郭成,等. 基于EMD 的井中雷达信号预处理[J]. 电子科技大学学报,2022,51(6):875-883.
[6] 马艳芳,刘雪贞,邓小飞. 刮板输送机链传动系统故障检测与诊断[J]. 煤矿机械,2021,42(4):181-183.
[7] 胡伟康. 基于卷积神经网络的立井刚性罐道健康监测研究[D]. 淮南:安徽理工大学,2021.
[8] 谢佳琪. 深度学习框架下的旋转机械故障诊断研究[D]. 苏州:苏州大学,2020.
[9] ABDELJABER O,AVCI O,KIRANYAZ S,et al. Inman,Realtime vibrationbased Structural Damage Detection Using Onedimensional Convolutional Neural Networks[J]. Journal of Sound and Vibration,2017,388:154-170.
[10] 顾清华,江松,李学现,等. 人工智能背景下采矿系统工程发展现状与展望[J]. 金属矿山,2022(5):10-25.
[11] 邱颖豫,张柯,杨欣毅. 面向旋转机械故障诊断的深度流形迁移学习[J]. 计算机工程与应用,2022,58(12):289-298.
[12] 张仲杭,蔡超志,徐辉,等. 基于纹理图像的强抗干扰性轴承故障诊断方法[J]. 轴承,2023(8):79-86.
[13] 蔡超志,池耀磊,郭璐彬. 基于一种高精度卷积神经网络的框架结构模型故障诊断研究[J]. 制造技术与机床,2022(1):135-140.
[14] 蔡超志,白金鑫,张仲杭等. 基于自适应小波降噪和In-ception 网络的齿轮箱故障诊断[J]. 制造技术与机床,2022(10):21-28.
[15] 邢科,吕泽均. 基于InceptionV4 模型的通信信号调制方式识别新方法[J]. 现代计算机,2021(12):48-54.
[16] 熊志斌. 基于CEEMDAN 与LSTM 的人民币汇率分析与预测[J]. 数理统计与管理,2022,41(3):507-525.
[17] ZHANG W,LI C H,PENG G L,et al. A Deep Convolutional Neural Network with New Training Methods for Bearing Fault Diagnosis Under Noisy Environment and Different Working Load [J ]. Mechanical Systems and Signal Processing,2018,100:439-453.
[18] 杜菲,马天兵,胡伟康,等. 基于小波变换和改进卷积神经网络的刚性罐道故障诊断[J]. 工矿自动化,2022,48(9):42-48.
[19] 马天兵,王孝东,杜菲,等. 基于小波包和BP 神经网络的刚性罐道故障诊断[J]. 工矿自动化,2018,44(8):76-80.
[20] 池耀磊. 基于深度学习理论的框架结构综合故障诊断研究[D]. 邯郸:河北工程大学,2022.
作者简介
马利芬 女,(1986—),硕士,高级工程师。主要研究方向:基于深度学习的采矿运输设备智能故障诊断。
王 伟 男,(1974—),博士,高级工程师。主要方向:暖通设备智能化健康检测与故障诊断。
池耀磊 男,(1996—),硕士,工程师。主要研究方向:基于深度学习理论的机械结构故障诊断。
朱宏伟 男,(1992—),硕士,讲师。主要研究方向:深度学习理论在实际工程中的应用。
韩 磊 男,(1982—),硕士,工程师。主要研究方向:基于深度学习理论的电子技术。
基金项目:河北省重大科技成果转化专项(22293601Z)
