多超声波传感器在双足步行机器人中的应用
2024-07-09李辉辉黄廷勋周健李丽珠彭海辉
李辉辉 黄廷勋 周健 李丽珠 彭海辉
关键词:避障;导航;航线;性能
0引言
双足步行机器人能模仿人类步行移动,具备良好的机动性能,并且能适应多种复杂的地形,与轮式机器人形成优势互补[1-2]。因此,双足步行机器人的研究和应用越来越成为国内外专家学者关注的热点[3-5]。在移动过程中,双足步行机器人难免会遇到障碍物,因此需要进行避障[6-7]。超声波传感器具有性价比高、使用方便、适用范围广等优势,在机器人避障技术领域被广泛应用[8-12]。周文芳[13]运用超声波传感器设计出小型无人艇室内避障定位误差修正系统,为机器人躲避移动障碍物的控制方法提供了参考。吴春玉[14]设计的农用四轴飞行器避障控制系统,将机器视觉和超声波测距融合,使农用四轴飞行器实现了自主避障功能。李博等[15]将超声波测距技术应用在定制家具中,能有效识别运行路线上的障碍物信息,并成功避障。
本研究的目标是通过采用3个超声波传感器,让双足步行机器人具备避障和导航两种功能。为达到预期目标,需要根据机器人作业场地的特点,有针对性地设计机器人的硬件配置和控制算法。
1总体框架
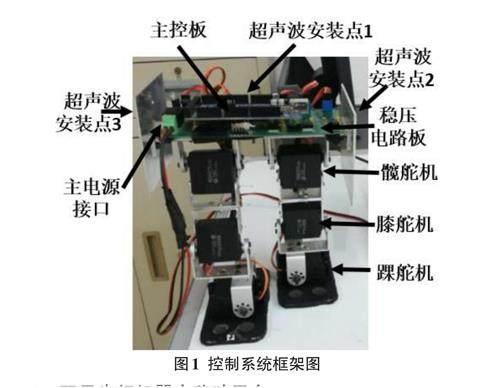
如图1所示,本研究控制系统主要由4部分组成:主控板、双足步行机器人移动平台、超声波传感器和电源模块。
1.1双足步行机器人移动平台
双足步行机器人移动平台由6个舵机组成。本研究配置的舵机最佳工作电压约为DC8V。舵机根据接收到的脉冲宽度调制PWM(PulseWidthModula?tion)信号,可使舵机旋转到0°至180°之间的任意位置停止。因此,给机器人双足的髋、膝、踝关节部位各配置1个舵机,通过控制6个舵机的协同转动,便可使机器人模仿人类双足步行,实现前进、后退、向左转、向右转等动作[16]。
1.2超声波传感器
控制系统配置了3个型号为HC-SR04的超声波传感器,分别安装在机器人的前、左、右三个方向,用于探测这三个方向的障碍物信息。HC-SR04超声波传感器能在DC5V情况下正常工作。以探头为起点,呈约15°角的扇形,能探测到前方同一高度2cm至400cm范围内的障碍物距离,精度可达3mm。
1.3主控板
主控板采用ArduinoMEGA2560为主控器。该开发板采用DC5V电压供电,配置了16个模拟传感器端口和12个PWM输出端口。即该开发板可以同时接收16个超声波传感器数据、控制12个舵机。而本研究只用到3个超声波传感器和6个舵机。因此,选择Ar?duinoMEGA2560作为主控器能满足本研究的控制要求。
1.4电源模块
控制系统采用锂电池作为主电源。一方面,采用LM2596稳压芯片电路得到DC8V电压,分别为6个舵机供电;另一方面,通过LM2576稳压芯片电路获得DC5V电压,分别为主控板和3个超声波传感器供电。
2控制策略
2.1改善前
控制系统最初的控制方法是:只有当机器人前方50cm内出现障碍物时,才读取左、右两侧超声波传感器探测到的障碍物信息,并让机器人朝着无障碍或者障碍物距离较远的一侧前进。
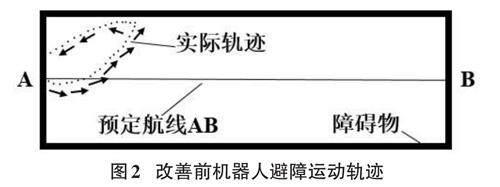
然而,由于双足步行机器人自身机械结构、地面粗糙程度等原因,机器人前进一段距离后,会朝着前进方向的左边一侧偏航。通过试验发现,如图2所示,该方法虽然能保证机器人成功避开障碍物,但它的运动轨迹是漫无目的,很难让机器人按照预定航线从A点出发,到达终点B。
原因分析:只有当机器人前方遇到障碍物时,才会探测机器人左、右两侧的障碍物信息,这会导致机器人不能及时发现航向是否发生了偏离。
该方法的优点是:避障算法不复杂,容易编写C语言程序;缺点是:只能避障,而不能按照预定航线完成任务。该部分算法可以作为控制系统的避障子程序使用。
2.2改善后
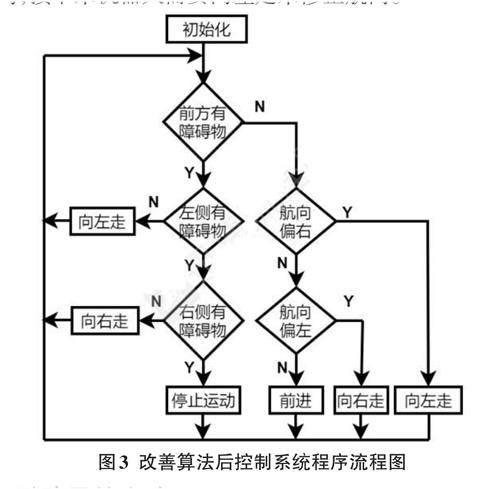
为了让机器人实时感知航向是否发生偏离,并确保机器人尽可能地按照预定航线运动,本研究在控制方法上做了改进。如图3所示,是改进后的程序流程图。
1)机器人在运动的同时,主控器实时读取安装在机器人前、左、右三个方向的超声波传感器数据。2)如果前方障碍物距离小于设定阈值△L,则认为前方有障碍物。此时机器人应优先避障,而非修正航向。3)如果前方没有障碍物,则比较左、右两侧障碍物的距离的差值。当该差值超过设定阈值△l时,就认为机器人的航向已经发生了偏离,需要修正航向。例如,如果分别探测到距离机器人左侧2.5m、右侧1.5米处有障碍物,则认为机器人的航向已经向右发生了偏离,接下来机器人需要向左走来修正航向。
3避障导航实验
3.1试验结果
试验在学校教室内进行,用挡板设置一块尺寸为4m×9m的长方形封闭区域。机器人实际运动轨迹用虚线和箭头进行标记,如图4所示。试验结果表明:1)改善算法后,机器人的运动轨迹围绕预定航线呈蛇形走位,基本上能按照预定航线前进;2)能成功避开前方障碍物。
3.2试验分析
1)蛇形走位分析。由于机器人运动时会晃动,且不是一直走在预定航线上,会导致安装在机器人左、右两侧的超声波传感器所探测的障碍物距离并不一致,容易超出判断是否产生航向偏差的阈值△l,会使机器人认为已发生航向偏差,需要修正运动方向。
2)阈值分析。判断机器人是否产生航向偏差的阈值△l要适中。如果△l过小,则机器人需要频繁修正航向,不利于正常前进;如果△l过大,则容易使机器人产生的航向偏差过大而难以修正。同时,会导致安装在机器人前方的超声波传感器检测到的障碍物距离小于设定阈值△L,触发避障子程序。在这种情况下,机器人既要修正航向,又要避障,从而加大了试验失败的风险。
3)预定航线分析。预定航线的方向是在控制系统程序初始化之前,机器人正前方所在的方向。如果在机器人前进的过程中出现障碍物,则机器人要优先完成避障动作。但是,等机器人完成避障动作后,机器人将不再按照原先的预定航线前进,而是以完成避障动作时的方向作为新的预定航线。
4)导航功能的条件分析。本研究对导航的定义是让机器人按照预定航线前进。但是,机器人前进过程中遇到障碍物后,机器人将不一定继续按照原来的预定航线前进。因此,机器人从A点出发,到达B点完成任务以后,不一定能再次返回A点。
4结束语
本研究的亮点在于:首先,给双足步行机器人的前、左、右三个方向各配置1个超声波传感器;其次,根据障碍物信息来判断航向偏差,并及时修正航向;最终,让机器人按照预定航线前进并成功避障。然而,本研究的试验是在较为理想的环境中进行的,对机器人在复杂环境中实现避障和导航功能的研究不够深入。因此,在后续的研究中,应结合当下企业实际的生产环境,有针对性地完善控制系统的传感器配置和控制算法,以提高本研究双足步行机器人的实用性能。
