机器人学基础课程轨迹规划仿真教学研究
2024-07-01李壮方贞琪王兴宇唐乐陈章宝
李壮 方贞琪 王兴宇 唐乐 陈章宝

【摘 要】 机器人轨迹规划技术是机器人学基础课程中的核心内容,是研究机器人、机械臂等系统的重要理论基础,课程体现了较强的实践性,理论知识涉及三维空间,公式推导过程较为复杂、抽象。应用MATLAB中强大的数值计算和可视化功能,结合轨迹规划中理论公式对机器人轨迹进行规划、分析。通过数值仿真对机器人笛卡尔空间、关节空间的轨迹进行规划,让学生直观地学到轨迹规划理论,掌握从公式推理到数值仿真的实践过程,增强学生对轨迹规划的理解,提高学生的专业知识能力,提升教学效果。
【关键词】 轨迹规划;MATLAB;关节空间;笛卡尔空间;数值仿真
Research on Simulation Teaching of Trajectory
Planning of Basic Course of Robotics
Li Zhuang, Fang Zhenqi, Wang Xingyu, Tang Le, Chen Zhangbao
(Bengbu College, Bengbu 233030, China)
【Abstract】 Robot trajectory planning technology is the key chapter in the basic course of robotics, and it is an important theoretical basis for the research of robot for robot arm and other systems. The course embodies strong practicality, its theoretical knowledge involves three-dimensional space, the theory is relatively complex and abstract, the formula derivation process also is complex. The powerful numerical calculation and visualization functions in MATLAB are applied to plan and analyze the trajectory of the robot in combination with the theoretical formulas in trajectory planning. Through numerical simulation, the trajectory planning of robot cartesian space and joint space is carried out, so that students can intuitively learn the trajectory planning theory, master the practical process from formula reasoning to numerical simulation, enhance students' understanding of trajectory planning, improve their professional knowledge and ability, and enhance the teaching effect.
【Key words】 trajectory planning; MATLAB; joint space; cartesian space; numerical simulation
〔中图分类号〕 TP242.6 〔文献标识码〕 A 〔文章编号〕 1674 - 3229(2024)02- 0107 - 07
[收稿日期] 2023-11-13
[基金项目] 安徽省高等学校省级质量工程项目“机器人工程新建专业质量提升项目” (2022xjzlts025);校级教研项目“新工科背景下‘机器人学基础课程教学与实践能力培养探索与实践”(2023jyxm16);国家级大学生创新创业训练计划项目“疫情下一种只能送餐送药机器人”(20221135007)
[作者简介] 李壮(1994- ),男,硕士,蚌埠学院电子与电气工程学院助教,研究方向:分布式模型预测控制、多智能体协同。
0 问题提出
机器人的轨迹规划是机器人学基础课程中重难点知识,也是机器人运动学的重要基础理论,其对机器人控制起到重要作用。机器人的空间轨迹包括位置、速度以及加速度等基本物理量,其包括笛卡尔空间路径规划和关节空间路径规划[1-2]。机器人进行轨迹规划的主要目的是在于已知机器人初、末状态位置时,机器人如何实现从初始位置平稳地达到终点位置。轨迹规划包括多种方式,在轨迹中存在奇异位置,靠近其位形时,关节速度会趋于无穷大,应避免此类情况出现;轨迹规划过程中,位置、速度以及加速度等变量需要满足基本约束条件和自由度参数,因此机器人的轨迹规划过程就显得十分重要[3-4]。
针对轨迹规划问题,众多学者开展了不同的研究。文献[5]根据不同类型的轨迹规划方法展开研究;文献[6]针对工业机器人应用不同的轨迹方法进行设计仿真,总结相关特点;文献[7]介绍了轨迹规划中多项式插值方法和笛卡尔空间轨迹规划方法,并针对能量、时间等参数进行研究分析、归纳。文献[8]就如何提高实验操作的可行性和课程教学提出了相关措施方法。
机器人学基础课程中详细阐述了笛卡尔空间规划和关节空间规划,其中关节空间规划包括多项式路径规划、抛物线拟合线性插值路径规划等;笛卡尔空间路径规划包括空间直线位置插值、空间圆弧位置插值以及姿态插值等[9-10]。本文将对上述两种方式进行理论分析、推导和数值仿真,最后对路径规划内容进行总结。
机器人工程专业涉及专业知识较多,尤其是数学计算与推导部分,成为了众多学生的难题,单纯的理论计算在一定程度上削弱了学生的实践能力,进而影响到专业的发展[11]。本文就机器人学基础课程建设问题在课程中融入实例仿真,同时结合工业机器人设备和视觉搬运机器人开展实践操作与学习,进一步提升学生的专业素质能力和综合实践能力。
1 关节空间路径规划
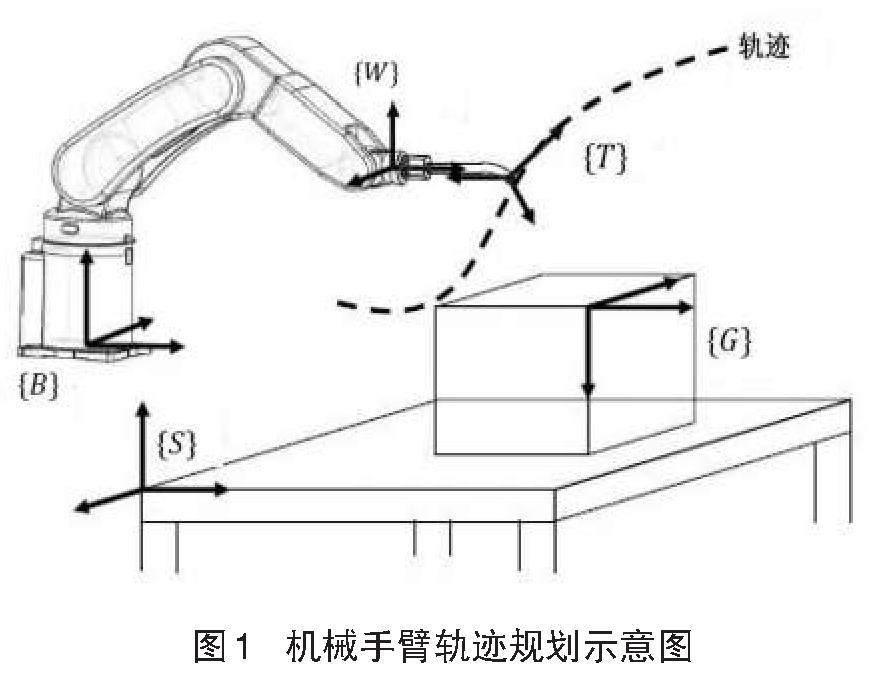
关节空间是对机器人的各个关节进行规划,规划参数有位置、角度等。关节空间规划是以关节角度的函数来描述机器人的轨迹,不考虑工作空间坐标中的路径形状,计算较为简单。图1为机械手臂轨迹规划图。
其中虚线表示机械手臂末端的轨迹,B、S、W、T、G分别表示基坐标系、站坐标系、腕部坐标系、工具坐标系以及目标坐标系,根据坐标相对位置关系确立其次坐标变换矩阵,进行轨迹规划。
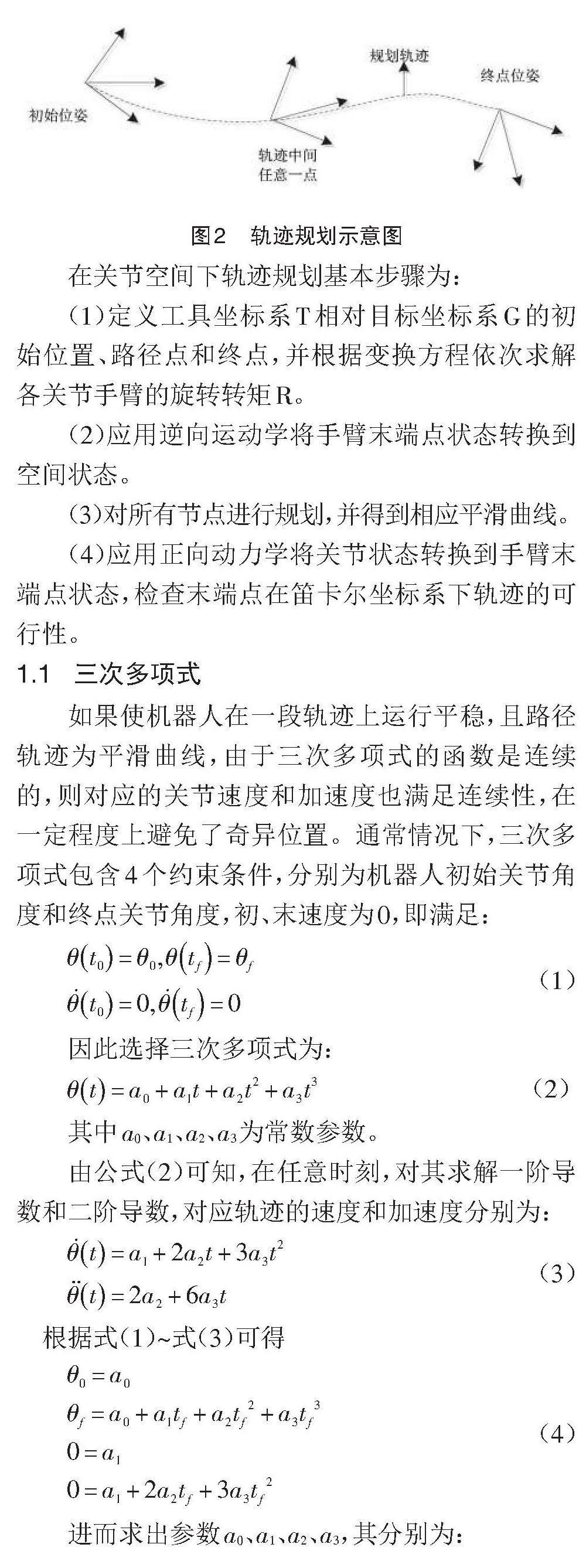
在关节空间轨迹规划中重点考虑初始点和目标点的位姿、速度以及加速度,其特点是计算量小、运行速度快等。轨迹规划示意图如图2所示。
在关节空间下轨迹规划基本步骤为:
(1)定义工具坐标系T相对目标坐标系G的初始位置、路径点和终点,并根据变换方程依次求解各关节手臂的旋转转矩R。
(2)应用逆向运动学将手臂末端点状态转换到空间状态。
(3)对所有节点进行规划,并得到相应平滑曲线。
(4)应用正向动力学将关节状态转换到手臂末端点状态,检查末端点在笛卡尔坐标系下轨迹的可行性。
1.1 三次多项式
如果使机器人在一段轨迹上运行平稳,且路径轨迹为平滑曲线,由于三次多项式的函数是连续的,则对应的关节速度和加速度也满足连续性,在一定程度上避免了奇异位置。通常情况下,三次多项式包含4个约束条件,分别为机器人初始关节角度和终点关节角度,初、末速度为0,即满足:
[θt0=θ0,θtf=θfθt0=0,θtf=0] (1)
因此选择三次多项式为:
[θt=a0+a1t+a2t2+a3t3] (2)
其中a0、a1、a2、a3为常数参数。
由公式(2)可知,在任意时刻,对其求解一阶导数和二阶导数,对应轨迹的速度和加速度分别为:
[θt=a1+2a2t+3a3t2θt=2a2+6a3t] (3) 根据式(1)~式(3)可得
[θ0=a0θf=a0+a1tf+a2tf2+a3tf30=a10=a1+2a2tf+3a3tf2] (4)
进而求出参数a0、a1、a2、a3,其分别为:
[a0=θ0a1=0a2=3t2fθf-θ0a3=-2t3fθf-θ0] (5)
则三次多项式插值函数为
[θt=θ0+3t2fθf-θ0t2+3t2fθf-θ0t3] (6) 结合理论推导和分析,应用MATLAB进行数值仿真,其结果如图3所示。
由图3可知,在建立关节函数后,已知起始、终点位姿后,可确立关节空轨迹插补曲线。
1.2 高次多项式
在路径规划过程中,当考虑约束条件较多时,则可以应用高阶多项式作为路径段进行规划;如考虑约束条件包括路径段的起始点和终点位置、速度以及加速度时,则可采用高阶多项式插值函数进行轨迹规划,其表达式为:
[θt=a0+a1t+a2t2+a3t3+a4t4+a5t5] (7) 其中a0、a1、a2、a3、a4、a5为常数参数;对式(7)分别求解多阶导数:
[a0=θ0θf=a0+a1t+a2t2+a3t3+a4t4+a5t5θ0=a1θf=a1+2a2tf+3a3tf2+4a4tf3+5a5tf4θ0=2a2θf=2a2+6a3tf+12a4tf2+20a5tf3] (8) 式(8)为轨迹规划的约束条件。通过求解,高次多项式参数分别为:
[a0=θ0a1=θ0a2=θ02a3=20θf-20θ0-8θf+12θ0tf-3θ0-θft2f2t3fa4=30θf-30θ0+14θf+16θ0tf+3θ0-2θft2f2t4fa5=12θf-12θ0-6θf+6θ0tf-θ0-θft2f2t5f] (9)
在MATLAB中添加Robotics Toobox中的tpoly函数,对上述内容进行仿真分析,结果如图4所示。图(a)为机器人关节移动位移,图(b)为机器人关节速度变化,图(c)为机器人关节加速度变化曲线。
由图4可知,在考虑多约束条件时,机器人关节角度、角速度以及加速度变化满足对应数值关系,轨迹规划过程中未出现奇异位形。
2 笛卡尔空间轨迹规划
在关节空间中进行轨迹规划时,要使机械臂到达期望的位姿,但其无法保证末端执行器在笛卡尔空间中路径的线性。因此对机器人操作器末端规划要求精确时,则应当考虑笛卡尔空间路径规划。其规划步骤为:
(1)定义工具坐标系T相对目标坐标系G的初始位置、路径点和终点,应用各节点位置和旋转列写出各个节点位姿。
(2)对各位置点坐标选取曲线进行拟合,进而对手臂末端点状态进行规划。
(3)将规划好的手臂末端点状态的轨迹转换到关节空间。
(4)检查节点状态在关节空间下的轨迹是否具备可行性。
2.1 直线轨迹规划
直线轨迹规划是指已知始末两端位置和姿态时,求解轨迹中间点的姿态和位置,主要包括两种方法,分别为对中间位置的分量进行直接插补和利用驱动函数进行插补。下面介绍对中间位置的分量进行直接插补。
在空间当中存在任意两点,分别为起始时A(x0,y0,z0),终点B(xf,yf,zf),其中直线插补次数为N,插补点的位姿和位置可求得为:
[xi+1=xi+i+1Δxyi+1=yi+i+1Δyzi+1=zi+i+1Δz i=0,1,…,N] (10)
其中xi、yi、zi为插补点位置,[Δx]、[Δy]、[Δz]为位置增量,其解为:
[Δx=xf-x0N+1Δy=yf-y0N+1Δz=zf-z0N+1] (11)
由图5、图6可知,对机械臂末端执行器轨迹进行直线插补规划,其路径直观,满足线性关系,关节角度变化在对应范围内。
2.2 圆弧轨迹规划
通常圆弧轨迹规划包括平面圆弧和空间圆弧,以平面圆弧轨迹规划为例。在二维平面中存在任意一点,并作为圆心o,其半径大小为r、圆心角为b、插补次数为N,在此圆弧上存在多个位置,可通过旋转关系求解圆弧上点的坐标,考虑起始相角为g,其示意图如图7所示。
[xA=x0+rsinγyA=y0+rcosγzA=z0 ] (12)
由图7可知,其位置关系满足:
[xC=x0+rsinγ+βyC=y0+rcosγ+βzC=z0 ] (13)
[Δβ=β/N+1] (14)
则圆弧上任意一点坐标pi(xi,yi,zi)为
[xi=x0+rsinγ+iΔβyi=y0+rcosγ+iΔβzi=z0 i=0,1,2,…,N+1] (15)
根据上述公式推导和圆弧轨迹规划原理,应用MATLAB进行数值仿真,其结果如图8所示。
如图8、图9所示,应用圆弧插补方式进行轨迹规划,插补值在圆弧上,末端执行器规划过程中不会累积偏差,精确度高,位置变化曲线满足相应关系。
3 应用案例
为了更好地展示机械臂末端执行器轨迹规划过程,本案例应用实物机械臂设备一套,如图10(a)所示,主要包括视觉设备一套、气泵以及转台设备等。如图11所示,首先获取物件位置,即物件坐标系,并确立执行器末端坐标,包括其位置和姿态,进一步对机械臂4个关节进行控制,设置相应关节角。由图12可知,机械臂在规划好的轨迹上运动,可实时反馈关节位置和姿态。其过程示意图分别如图10(b)、10(c)、10(d)所示,机械臂末端执行器获取目标点,并获取物件,按照对应轨迹进行关节转动,最后将物件放置目标位置,完成轨迹规划和物件抓取的任务。图13表示关节规划参数的设置。
4 结语
本文通过理论推导和应用MATLAB数值仿真计算分析了关节空间规划和笛卡尔空间规划两种方式,两类规划方法适用于不同情况。将课程知识与仿真实例相结合,并依托学院相关视觉机械臂开展实际的轨迹规划操作,使得学生深刻理解专业知识,掌握轨迹规划的概念与实际工程意义,培养学生问题分析能力和解决问题能力,进一步激发机器人工程专业学生学习的主观能动性,同时提升了课堂效率和教学效果。
[参考文献]
[1] 皇甫小峰,邹光明,刘源泂,等.基于分段插补的焊接轨迹规划研究[J].农业装备与车辆工程,2023(3):1-8
[2] 卢凌霄,董乾鹏,张天乐,等.机器人运动学与运动规划算法综述[J].印刷与数字媒体技术研究,2023(5):1-16.
[3] 胡凌燕,李建华,陈江南,等.机器人控制基础与实践教程[M].北京:高等教育出版社,2022.
[4] 张家琪,马跃,张智涛,等.一种高速并联机器人的运动学建模与轨迹规划仿真[J].机械设计,2023,40(9):43-48.
[5] 李尉,邓朝晖,葛吉民,等.机器人关节空间轨迹规划研究进展[J].机械设计与制造工程,2022,51(10):15-23.
[6] 范祺,蔡玉强,贾思楠.多种方法的工业机器人轨迹规划与仿真[J].华北理工大学学报(自然科学版),2022,44(4):60-67.
[7] 郭萍.工业机器人轨迹规划研究[J].中国新技术新产品,2022(19):42-45.
[8] 杨金铎,王林波,曾惜,等.自动化机器人轨迹跟踪与路径规划技术研究[J].自动化仪表,2022,43(7):40-45.
[9] 卢青,郭建国.“新工科”背景下的机器人轨迹规划实验教学系统设计[J].实验室研究与探索,2022,41(5):147-150+201.
[10] 董理,杨东,鹿建森.工业机器人轨迹规划方法综述[J].控制工程,2022,29(12):2365-2374.
[11] 罗少轩,乔爱民,王艳春.工业机器人关节复合力测量实验装置设计及其教学应用[J].廊坊师范学院学报(自然科学版),2023,23(2):108-111.