双馈风机对电网频率扰动的动态响应建模与分析
2024-05-18李鲁阳王方政刘喜泉
李鲁阳,王方政,陈 磊,王 罗,闵 勇,刘喜泉
(1.清华大学电机工程与应用电子技术系,北京市 100084;2.中国长江三峡集团有限公司科学技术研究院,北京市 100038)
0 引言
随着能源结构转型的持续推进,风电、光伏等新能源大量替代传统同步发电机并入电网,电力系统的动态特性发生巨大变化。新能源发电设备常采用最大功率点跟踪(MPPT)控制,并利用电力电子接口装置并网,输出功率的控制目标是最大化利用风能、太阳能资源,而且不与电网直接耦合,所以在不附加频率控制策略时一般被认为不响应系统频率变化。因此,新能源大量替换同步发电机后导致系统调频能力降低,是含高比例新能源、高比例电力电子设备的电力系统频率安全问题日益突出的主要原因。
双馈风机(下文简称DFIG)是风力发电的主要形式之一,传统的观念认为DFIG 受转子侧变流器的控制从而与电力系统解耦,风机的出力以最大化利用风能为目标,不响应系统频率变化[1-5]。但是,DFIG 和电网通过定子回路及电机内部的磁路直接耦合,机电解耦是通过控制实现的。对于一个由状态偏差所驱动的控制器而言,响应的延时特性必然导致风机和电网存在耦合,DFIG 在机电耦合及控制器的共同作用下会响应系统频率扰动。在DFIG占比较高的系统中,忽略其动态特性将导致系统频率动态分析及安全评估与实际情况存在偏差[6-7]。
已有研究注意到该特性,并在DFIG 的频率响应建模和特性分析方面展开了一些研究。文献[8-11]构建了能够准确描述DFIG 各类机电时间尺度动态行为的通用化幅相动力学模型。然而,该模型详细考虑了完整的控制器结构,阶数较高;同时,模型的使用需要借助系统网络方程详细计算各并网点电压的幅值、相位扰动量,无法直接集成于电力系统频率响应模型中,不属于专门用于频率动态分析的模型。为了弥补这一不足,不少文献已开展了模型的降阶和改进工作。但是,在主导环节的判断和取舍方面,不同的文献存在不同的观点。文献[12-13]认为锁相环(PLL)是主导DFIG 频率响应过程的关键环节,文献[14-16]认为主导环节是转子变流器的控制外环,文献[17]则认为是内环。可以看出,在控制器的建模方面,目前对主导DFIG 频率的控制环节尚未形成明确、统一的认识,各类降阶模型的精度及对机理的阐述普遍存在不足。在电机本体的建模方面,现有文献通常采用保留转子回路动态和机械运动方程的三阶模型[18]。但是,文献[12-13]均指出,受逆变器控制策略的影响,DFIG 定、转子回路动态的时间尺度均为毫秒级,与频率响应不属于同一时间尺度,这意味电机本体的模型也可进一步降阶。总体而言,现有DFIG 频率响应模型的准确性和简洁性均有提升的空间,对响应机理的解释也不够透彻。在频率响应的建模和机理分析等方面的不足也导致对DFIG 频率响应特性的阐述不清晰。在DFIG 频率响应特性分析方面,大量文献认为DFIG的响应属于惯量响应的范畴,并借助惯量、阻尼系数等概念加以分析使其便于与同步发电机相类比[19-22],虽然这为系统频率动态分析提供了便利,但由于忽略了DFIG 响应特性与同步惯量响应的差异性,导致对DFIG 频率响应特性的认识和描述不够准确,并且易于造成系统惯量评估等方面分析的误差。
针对现有研究的不足,本文首先建立了一种单输入单输出DFIG 频率响应模型,在保证精度不变的前提下降低了模型阶数;同时,模型消除了对并网点电压幅值、相角扰动量等分布式信息的依赖,使得该模型以频率扰动这一系统全局信息为唯一输入,从而可以被直接集成于系统频率响应(system frequency response,SFR)模型,提升了易用性。基于该模型阐明了DFIG 响应系统频率变化的机理是PLL 和转速环的级联效应。接下来,对DFIG 的频率响应特性进行了分析,通过理论计算和仿真验证证明DFIG 的频率响应不属于惯量响应的范畴。最后,文章分析了DFIG 的接入对电力系统频率动态的影响。
1 DFIG 频率响应模型
1.1 DFIG 频率响应模型推导
本文的研究对象是DFIG 对系统频率扰动的响应,关注电力系统频率动态时间尺度内DFIG 的动态特性。电力系统频率动态的时间尺度较大,属于机电暂态的时间尺度范围,在数秒到数十秒之间。为了降低模型阶数、突出主要矛盾,根据多时间尺度系统建模的原则,将所关注问题时间尺度以外的环节进行降阶简化,做出如下假设[12,14]:
1)忽略电机内部磁链的毫秒级电磁暂态过程;
2)忽略转子侧变流器内环的毫秒级动态调节过程;
3)忽略电网侧变流器的百毫秒级直流电压控制过程;
4)忽略分钟级的风速变化,认为变桨和偏航控制系统在这段时间内不动作;
5)由于电力系统频率偏差一般较小,因此采用小扰动线性化模型。
按发电机惯例建模,规定有功功率的正方向为从电机流向电网,机械转矩和电磁转矩分别为原动转矩和制动转矩。同时,假设DFIG 为定子电压矢量定向控制,电压矢量与d轴重合并滞后q轴90°。不同坐标系之间的关系如附录A 图A1 所示。
根据图1 所示DFIG 典型控制策略[23-25],可以建立DFIG 的标幺化模型。根据文献[8,19],当采用图1(c)所示的控制器结构时,在控制器和系统扰动影响定子回路功率和内电势的线性化表达式分别为:
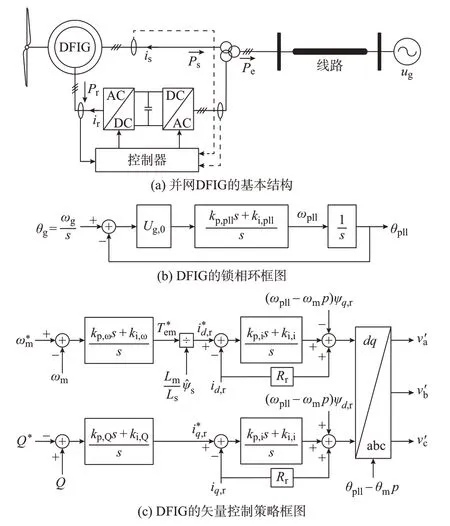
图1 DFIG 的基本结构和矢量控制框图Fig.1 Basic structure of DFIG and block diagram of vector control
其中
式中:kp,pll和ki,pll分别为PLL 的比例、积分调节系数。
根据电机学原理,在忽略内部磁链的电磁暂态过程后,DFIG 总输出功率Pe、定子功率Ps和转子功率Pr之间的关系可以表示为[14]:
另一方面,DFIG 的转子运动方程可以表示为:
式 中:Tm为DFIG 的 机 械 转 矩;F为 阻 尼 系 数;H为转动惯量。
联立式(4)和式(5)并进行线性化可得定子功率和系统频率影响DFIG 转速变化的过程:
式中:Ωg,0为电网角频率稳态值;Ωm,0为转子角频率稳态值;Ps,0为定子有功功率稳态值。
将式(6)代入式(2)消去转速Δωm(s),并和式(1)整合,则可得到内电势幅值、相角的完整表达式为:
其中
将式(1)与式(7)联立,消去定子回路功率后可以得到:
式中:I2×2为二阶单位对角阵,即I=diag(1,1)。式(9)描述了系统的电压和频率变化时控制器驱动电机内电势的控制过程。该表达式较为复杂,不便于实际应用,需要进行化简。
为了方便描述,首先做如下定义:
式中:Gω为转速环的开环传递函数;CQ为转子变流器q轴外环PI 控制器函数;σs为电机定子回路漏感系数。
由于频率响应特性研究所关注的是装备在频率扰动后输出功率的变化,因此可以将式(1)和式(9)、式(10)联立,将ΔE和Δθe消去从而得到系统电压和相角偏差驱动DFIG 定子功率的表达式,如式(12)和式(13)所示。
式中:ωb为系统角频率基值;δ0为DFIG 定子回路的稳态功角。
从式(13)可以看出,传递函数矩阵As中与电压扰动量相对应的元素为零,无功控制器对频率响应动态过程也没有影响。由此可知,在多时间尺度降阶原则下,并网点的电压扰动和无功控制回路几乎不影响模型在频率动态时间尺度的有功动态特性。
接下来,将式(4)线性化并代入式(6),消去Δωm可得DFIG 总输出功率的扰动量为:
式 中:Pe,0为DFIG 电 磁 功 率 的 稳 态 值。
根据式(14)可知,DFIG 总输出功率同时受Δωg(s)和ΔPs(s)影响。Δωg(s)项体现了系统频率扰动直接影响输出功率发生变化的过程,该过程与异步电机类似[26],属于电机的固有特性。而根据式(13),ΔPs(s)项是Δωg(s)(Δθg(s)的微分)的函数,体现了控制器在Δωg(s)扰动下的作用。
将式(12)代入式(14)即可得到DFIG 输出功率响应系统频率偏差的完整模型表达式,即
式中:As2表示As第2 列元素。具体观察As2可知,PLL 和转速控制环均对DFIG 的频率响应过程有重要影响,其作用的过程较为复杂。为了便于分析和理解,本文对模型进一步解析。因为单位反馈系统的开环传递函数G和闭环传递函数Φ具有形如1/(1+G)=1-Φ的关系,考虑这一换算关系后,DFIG 的频率响应模型表达式可简化为:
消去式(16)中重合的零极点后可得DFIG 降阶频率响应模型的简化表达式如式(17)所示。该模型以频率变化量Δωg这一全局信息为唯一输入量,响应功率的求解不依赖于并网点的电压扰动量和相位扰动量等局部信息。进行系统频率响应分析时无须构建网络方程,可以直接将模型集成于电力SFR 模型中,以详细分析高比例风电接入场景下系统频率动态。
式中:Dω(s)和Dp(s)分别为转速控制环和PLL 闭环传递函数的特征方程,具体如式(18)所示。
根据式(18),DFIG 总输出功率响应系统频率偏差的框图及DFIG 的频率响应模型如图2 所示。值得说明的是,由于建模时忽略了变桨系统的动态过程,本文所提出的DFIG 频率响应模型适用于风速范围在0~1.2 p.u.之间的工况。
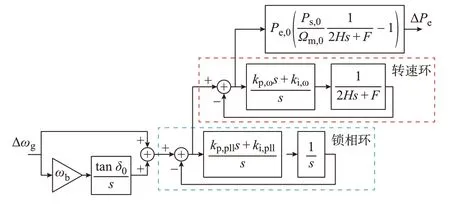
图2 DFIG 的频率响应过程Fig.2 Frequency response process of DFIG
1.2 模型验证
1)不同工况下模型准确性验证
本文将所提出的DFIG 频率响应模型与MATLAB/Simulink 中的DFIG 详细示例模型进行对比以验证其准确性,该模型的搭建基于文献[23,27-28]。比较场景为DFIG 经过一段线路接入一个电压源表示的系统,电压源频率发生扰动模拟系统频率扰动,具体如图1(a)所示,系统参数如附录A表A1 所示。遵循模型测试的惯例进行阶跃响应的对比。仿真设定第5 s 时系统频率由1 p.u.阶跃至1.003 3 p.u.。图3(a)为DFIG 总输出功率响应曲线的对比图。从图中可以看出,所提出的频率响应模型与Simulink 详细模型有着较高的吻合度,说明本文的建模假设合理、推导正确,模型能够反映系统频率变化后DFIG 输出功率的动态特性。
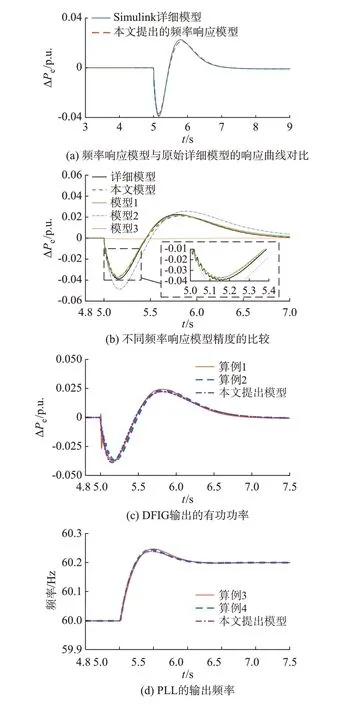
图3 DFIG 频率响应模型的验证和比较Fig.3 Verification and comparison of DFIG frequency response model
2)与已有频率响应模型的比较
图3(b)以Simulink 中 的DFIG 详 细 模 型 为 基准,将本文所提出的模型和几类常用的DFIG 频率响 应 模 型 进 行 了 对 比[14,16,29-31]。图 中 的 模 型1 是 七阶的DFIG 频率响应模型,控制器部分保留d、q轴外环和PLL 的动态过程,发电机部分保留转子回路磁链暂态和转子运动方程,其余状态变量均被忽略[14,16]。模型2 是保留PLL 动态的二阶频率响应模型[29]。模型3 为仅保留转速变化量和MPPT 策略的经典DFIG 频率响应模型[30-31]。
由图3 可知,虽然本文所提出的模型相对于模型1 而言阶数有所降低,但二者的精度基本一致,都能够较好地体现DFIG 的频率响应特性。两者的差异主要是本文所提出模型忽略了扰动之初有功功率的小幅度快速衰减振荡,但这对于系统频率动态的研究是可以接受的。相比于模型2 和模型3,本文所提出模型的精度有着显著提高。模型2 虽然阶数较低,但是误差有所增加。以图示工况为例,在系统频率升高瞬间DFIG 输出功率降低,为系统提供了功率支撑。模型2 由于忽略了转速控制环的影响,计算出的功率支撑强于实际情况,因此保守性较弱,这对系统频率动态的分析是不利的。模型4 为传统的DFIG 频率响应模型,该模型仅考虑了转速变化和MPPT 策略的影响,虽然阶数较低,但是误差是很明显的,而且保守性过强,不适用于高风电比例电网的频率动态特性的研究。总体而言,本文所提出的DFIG 频率响应模型在精度上与现有的高精度模型相当,但阶数更低;相比于现有的低阶模型而言,在显著提升精度的同时保守性也更优。
3)忽略系统电压扰动及q轴控制回路的合理性验证
图3(c)展示了基于Simulink 模型库中DFIG 标准电磁暂态模型的两组工况下的波形对比[23,27-28]。算例1 忽略了DFIG 的无功控制回路(屏蔽q轴外环,内环指令值设为常数),设定并网点电压在系统频率变化时保持不变;算例2 考虑了DFIG 的无功控制回路,且设定系统频率变化的同时电压跌落10%,其他元件和参数均与算例1 相一致。两组算例所使用的模型均为DFIG 的原始详细模型。从图3(c)可以看出,两组算例的差异较小,由此可知忽略q轴及电压扰动不会导致DFIG 频率响应特性存在明显误差。同时,本文所提出模型的响应特性与算例1、算例2 基本一致,说明本文建模时对电压扰动和q轴的忽略是合理的。另一方面,图3(d)所示的波形对比了系统频率发生变化时是否伴随电压跌落工况下PLL 的响应。其中,算例3 为频率变化时电压无跌落工况,算例4 的工况则是频率变化时伴随10%电压跌落。两组算例均基于PLL 的详细模型,模型以三相电压瞬时值为输入,频率和相角为输出。对比电压是否跌落两种工况的仿真结果可以看出,电压波动造成的PLL 环路增益变化对其输出的影响也较小,且响应曲线与本文所使用的PLL 线性化模型响应特性基本一致。这说明图1(b)所示的PLL 线性化模型适用于DFIG 的频率动态分析。理论推导和电磁暂态模型的仿真对比证明,DFIG 模型中与Δug和无功回路相关的部分可被忽略。简化后的DFIG 模型以系统频率变化量Δωg(s)为唯一输入,可以被集成于SFR 模型中。
2 DFIG 频率响应机理
DFIG 对频率扰动的响应与电机的固有特性及控制器的行为均有关。根据式(16)和图2 可知,系统的频率偏差量及其在PLL 坐标系下的相角偏差量都引起DFIG 电磁功率发生变化。模型中与频率偏差项有关的部分是对转差功率关系式“Ps/ωg=Pe/ωm”的线性化导致的。对比文献[26]可知,它体现了转差率变化后DFIG 电磁功率的动态特性。而相角偏差项的存在则集中体现了DFIG 在异步化同步运行状态下呈现出的功角特性[32]。受自身转差特性和功角特性的影响,DFIG 的电磁功率将发生变化。
1)影响DFIG 频率响应的关键环节
系统频率扰动对DFIG 功率的影响导致电机转子轴上的功率不平衡,继而发生转速的变化,从而触发转速环的调节作用。同时,电网频率偏差将直接驱动PLL 动作,迫使PLL 坐标系重新与电网同步。PLL 和转速环的动作将改变功角,从而调节电磁功率和转速。在对转速和功角的调节过程中,DFIG的输出功率出现暂态变化,对外呈现出如式(17)所描述的频率响应行为。
DFIG 内电势功角与PLL 和转速环均有关。PLL 和转速环各自提供暂态和稳态功角以应对新频率下的转差率,从而维持功率恒定。PLL 和转速环对功角的贡献具体如附录A 图A2 所示。由此可见,PLL 和转速环是影响DFIG 频率响应的关键环节,二者对频率响应的作用均不可忽略,DFIG 频率响应为四阶动态过程,频率响应模型最低可降至四阶。
2)DFIG 的频率响应过程
频率变化对于PLL 和转速环而言属于扰动,PLL 和转速环被频率扰动信号驱动后开始动作以保证自身控制目标在新的频率下准确实现,从而间接实现维持输出功率不变的效果。受控制系统带宽和环路增益的影响,这一调节动态过程将持续一段时间,导致出现短暂的响应功率。在此期间内,频率持续变化后PLL 坐标系下的相角偏差将驱动PLL进行跟随,从而改变DFIG 的功角,在新的系统频率和转差率下维持原输出功率,在调节过程中暂态功率变化使转速环动作从而对输出功率进一步调节;同时,频率偏差直接引起DFIG 的转差率和电磁功率发生变化,导致PLL 坐标系中的转速环的动作。DFIG 的频率响应过程比较复杂,是PLL 和转速环耦合作用的结果,但总体可以归纳为二者对扰动功率的抑制。式(16)也说明了这一点:对于一个开环传递函数记为G的单位反馈系统,1/(1+G)即为其输入信号到偏差信号的闭环传递函数。根据式(16)和图2 可知,PLL 和转速环抑制功率波动的作用具有级联效应。这可以解释为:PLL 调节虽然影响功角和电磁功率,但是在风机输入机械功率不变的前提下,DFIG 的输出功率波动量ΔPe是由转速环通过转子动能的调控所最终决定的。同时,转速环并没有直接响应系统频率变化,而是响应了经由PLL 影响的Δωm,对功率进行调节。因此,有功功率对频率偏差的响应主要受到PLL 和转速环级联效应的影响。
3)影响DFIG 频率响应过程的关键因素
DFIG 的频率响应过程受PLL 和转速环级联效应的影响。因此,控制器参数对DFIG 的频率响应过程影响较大。系统频率跃升时,降低PLL 和转速环带宽对DFIG 频率响应过程的影响见图4。在图4(a)中,PLL 带宽为0.5 Hz 时锁相PI 调节器比例系数和积分系数分别为2.796 和0.977;带宽为1 Hz时锁相PI 调节器比例系数和积分系数分别为5.59和3.909;带宽为2 Hz 时锁相PI 调节器比例系数和积分系数分别为11.184 和15.636 5。在图4(b)中,转速环带宽为0.3 Hz 时转速PI 调节器比例系数和积分系数分别为2.298 和0.482;带宽为0.6 Hz 时转速PI 调节器比例系数和积分系数分别为4.597 和1.928;带宽为0.9 Hz 时转速PI 调节器比例系数和积分系数分别为14.767 和19.895。由图4 可知,随着带宽的降低,DFIG 抵抗扰动的能力降低,频率响应的过程随之延长,且功率变化的幅度有所增加。由于扰动之初ΔPe的变化方向和频率变化方向相反,DFIG 的频率响应特性对系统是有益的,运行中的风机完全可以基于系统的频率特性调整参数及带宽,使功率变化极值发生在系统频率极值时刻附近,为系统提供暂态支撑。
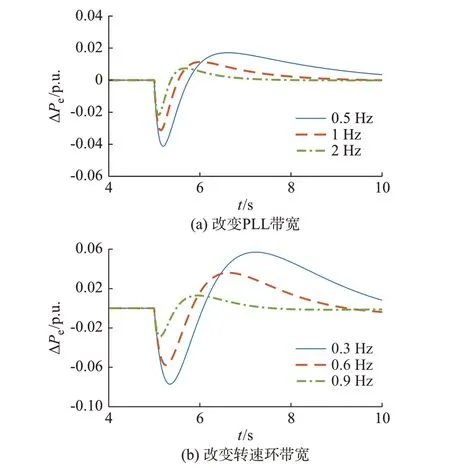
图4 控制器参数对DFIG 频率响应过程的影响Fig.4 Influence of controller parameters on DFIG frequency response process
需要说明,DFIG 的转动惯量H对频率响应过程也存在影响,转动惯量增加将导致DFIG 响应时间的延长。这是因为DFIG 的转动惯量影响了转速环的带宽。
3 DFIG 频率响应特性分析
根据频率响应模型可以进一步得到DFIG 的对数幅频特性曲线,具体如附录A 图A3 所示。对数幅频特性曲线表明DFIG 的功率响应对频率扰动具有高通特性。如前文所述,频率扰动对输出功率的影响受到PLL 和转速环的抑制。受自身带宽的限制,PLL 和转速环对扰动的抑制能力随着扰动频率的增加而逐渐减小。这使得幅频特性曲线的增益以40 dB/min 的速率增加并逐渐收敛至零。DFIG 的高通响应特性使其在电力系统功率扰动后的频率变化阶段存在暂态响应,而在频率达到稳态后,即使有稳态频差也无响应,输出功率逐渐收敛至零。
惯量响应也具有高通特性,因此有学者认为DFIG 的频率响应为惯量响应。但是,从式(17)所示的DFIG 模型可以看出,其频率响应特性与惯量响应明显不同。对于惯量响应而言,ΔPe与系统的频率变化率(rate of change of frequency,RoCoF)成比例,DFIG 的输出功率变化量ΔPe显然与RoCoF并非比例关系。
为了更加直观地描述DFIG 频率响应和惯量响应的区别,本文进一步以频率斜坡激励下的响应特性作为对比分析。式(19)展示了单位斜坡扰动后DFIG 输出功率初值ΔPe(0+)和终值ΔPe(∞):
从式(19)可知,DFIG 对斜坡激励扰动的响应初值与终值均为零。相对而言,同步电机惯量响应的初值和终值均与频率斜坡激励的变化率呈正比例关系。由此可知,DFIG 的频率响应特性与惯量响应完全不同,所以不属于惯量响应的范畴。
图5 将DFIG 的频率响应与同步电机进行了对比。同步电机的仿真基于Simulink 同步电机并网电磁暂态详细模型算例。仿真设定10 s 时系统的频率按照某一RoCoF 持续变化,以模拟实际系统在频率扰动最初阶段的特性。频率变化前DFIG 和同步电机的稳态输出功率均为1 p.u.。图5 对比了系统发生不同RoCoF 的频率扰动后DFIG 和同步电机的响应特性的仿真波形。由图可知,区别于DFIG,同步电机对于斜坡频率扰动的响应功率与频率变化率近似为比例关系,且终值不为零。图5 的仿真结果与理论计算结果接近一致。通过典型扰动下响应特性曲线的对比可以看出,DFIG 的频率响应具有高通特性,但与惯量响应差别较大。
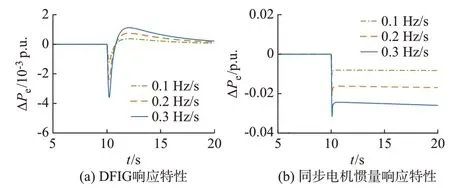
图5 DFIG 和同步电机在不同斜率的系统频率斜坡激励下的有功功率响应特性Fig.5 Active power response characteristics of DFIG and synchronous motors under system frequency ramp excitation with different slopes
4 DFIG 频率响应对系统频率动态的影响
系统功率扰动下的频率动态主要指标有频率变化率、最大频差、稳态频差,下面分别分析DFIG 的影响。
根据DFIG 频率模型和第3 章的分析可知,DFIG 的频率响应特性不是惯量响应,DFIG 对系统的等效惯量没有贡献。对于实际系统中发生的频率扰动,DFIG 在t=0+时刻的输出功率为0,因此对t=0+时刻RoCoF 没有影响,即DFIG 的频率响应不影响功率扰动后的最大RoCoF。
在稳态频差方面,DFIG 的高通特性使其对频率扰动的输出ΔPe收敛至零。因此,对系统稳态频差没有影响。
在最大频差方面,电力系统频率发生扰动之后,DFIG 输出和系统频率扰动Δf极性相反的功率ΔPe,这种特性对系统频率恢复是有利的。随后,DFIG 通过控制转速及d、q坐标系同步实现对输出功率的控制,当控制器参数取值合理时将对减小最大频率偏差有益,下面分析影响的大小。在计及DFIG 特性后,电力系统频率响应模型如图6(a)所示。图中:ΔP为电力系统中的有功功率扰动;Hs为系统惯量;kD和kG/(TGs+1)分别表征负荷及发电机的频率特性,而虚线框内的支路表征DFIG 的频率响应特性,其中,kD为负荷的频率调节效应系数,kG为调节系数,TG为调速器相应频率波动的延时系数。图6(b)和(c)对比了考虑DFIG 特性前后系统的频率响应曲线。由图可知,当系统的惯量较大时,DFIG 的频率响应特性对系统频率动态的影响不大;但当系统的惯量较小时,DFIG 对系统频率动态特性的影响不可忽略。例如:当Hs=10 时,是否考虑DFIG 特性对分析系统频率特性的影响不大;而当Hs=5 时,在考虑DFIG 特性后系统实际的最大频差为1.15×10-2p.u.,相比于不考虑时的1.3×10-2p.u.减小了11.54%。由此可知,对于低惯量的系统,忽略DFIG 特性将使得电力系统频率动态特性的分析存在较大偏差,从而导致对电力系统惯量需求的评估偏离实际情况。
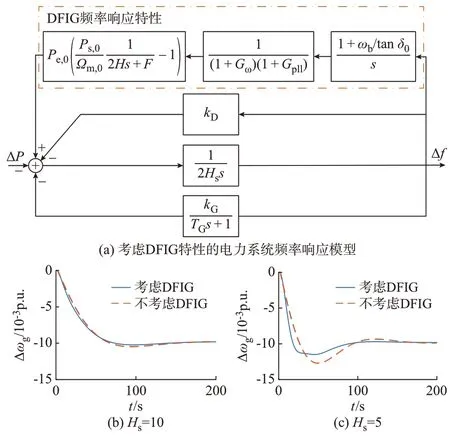
图6 考虑DFIG 特性前后系统频率响应模型和频率响应特性曲线Fig.6 System frequency response model and frequency response characteristic curves before and after considering DFIG characteristics
5 结语
本文建立了DFIG 响应系统频率扰动的动态模型,相对于经典的七阶模型而言,本文提出的模型在降低阶数的同时不损失精度,且模型的计算以频率扰动这一系统全局信息为唯一输入量,不依赖于具体并网点的电压扰动信息,从而可以被直接集成于SFR 模型。本文基于该模型对DFIG 频率响应特性展开了研究,揭示了DFIG 对系统频率扰动的响应源于自身PLL 和外环的级联耦合效应,该响应特性与惯量响应有着本质区别。本文的具体结论如下:
1)DFIG 的频率响应过程主要受到自身PLL 和转速控制环级联作用的影响。PLL 和转速环共同主导DFIG 的频率响应过程,两者都不应被忽略。综合考虑精度和模型简化需求,DFIG 频率响应模型可降低到四阶。
2)DFIG 兼具转差和功角特性,频率的变化将使其转差率和输出功率发生波动。转速环和PLL通过闭环控制完成扰动后的同步从而适应新的系统频率,抵抗频率扰动对输出功率的影响。DFIG 的频率响应特性受控制器参数的影响很大。
3)DFIG 的频率响应具有高通特性,在功率扰动后的系统频率变化阶段仅有暂态响应,在频率达到稳态时,即使有频率偏差也无响应。但是其输出功率变化量和系统RoCoF 之间不是比例关系。因此,其频率响应特性不属于传统的惯量响应,对改善t=0+时刻的最大RoCoF 没有帮助。
4)在系统频率变化时,DFIG 能够提供与频率变化方向相反的短时功率输出,这一响应特性对于系统是有益的,尤其在低惯量系统中不宜被忽略。在控制参数选取合理时,DFIG 的频率响应特性有助于改善系统最大频差。
下一步,将基于本文所提出的模型继续开展DFIG 频率响应过程优化控制和参数优化整定等方面的研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。