基于比例继动阀的解耦式制动能量回收
2024-05-10黄壮壮杨坤王戈王杰成兆君
黄壮壮 杨坤 王戈 王杰 成兆君
摘 要:針对纯电动商用车在连续制动时,气源压力偏低会导致驱动轴耦合制动力响应速度变慢,影响制动能量回收效率的问题,提出一种基于比例继动阀的解耦式制动能量回收系统(uncoupled braking energy recovery system, URBS)方案。首先,基于比例继动阀的迟滞特性,采用前馈-单神经元PID控制方法,实现制动气压的准确输出;其次,以电池SOC、车速等为约束条件,根据气源压力信号确定供压模式,并制定解耦式制动能量回收控制策略;最后,基于AMESim,MATLAB/Simulink及TruckSim搭建联合仿真平台,选取单次制动工况与循环工况验证了制动力耦合效果及系统的制动能量回收效果。结果表明,基于比例继动阀的URBS可实现耦合制动力的快速响应,达到稳态压力值75%的时间小于0.1 s,且在中国重型商用车行驶工况和中国重型商用车瞬态工况下有效制动能量回收率分别为10.13%,17.17%。所提URBS方案能有效提高驱动轴耦合制动力的响应速度及耦合精度,可为纯电动商用车气压式URBS方案设计提供参考。
关键词:车辆工程;解耦式制动能量回收;比例继动阀;单神经元PID;迟滞补偿;联合仿真
中图分类号:U469.72 文献标识码:A 文章编号:1008-1542(2024)02-0131-10
Uncoupled braking energy recovery system based onproportional relay valve
HUANG Zhuangzhuang1,YANG Kun1,WANG Ge2,WANG Jie1, CHENG Zhaojun3
(1.School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo, Shandong 255000, China;2.Shandong Tangjun Ouling Automobile Manufacture Company Limited, Zibo, Shandong 255000, China;3.Shandong Institute of Metrology, Jinan, Shandong 250100, China)
Abstract:Aiming at the problem that during continuous braking of pure electric commercial vehicles, low air source pressure will lead to slower braking force response speed of drive axle coupling and affect braking energy recovery efficiency, a scheme of uncoupled braking energy recovery system (URBS) based on proportional relay valve was proposed. Firstly, based on the hysteresis characteristics of the proportional relay valve, the feed-forward-single neuron PID control method was adopted to realize the accurate output of braking air pressure. Secondly, taking the battery SOC and vehicle speed as the constraints, the pressure supply mode was determined according to the pressure signal of the air source, and the uncoupled braking energy recovery control strategy was formulated. Finally, a joint simulation platform was built based on AMESim, MATLAB/Simulink and TruckSim, and a single braking condition and cyclic conditions were selected to verify the effect of the braking force coupling and the braking energy recovery of the system. The results show that URBS based on proportional relay valve can achieve rapid response of coupled braking force, with the time of less than 0.1 second to reach 75% of steady-state pressure value. The effective braking energy recovery rates under CHTC-HT(China heary-duty commercial vehicle test cycle for heavy truck) and C-WTVC(China world transient vehicle cycle) conditions are 10.13% and 17.17%, respectively. The proposed URBS scheme can effectively improve the response speed and coupling accuracy of coupled braking force of the drive axle, and can provide reference for the design of pneumatic URBS schemes for pure electric commercial vehicles.
Keywords:vehicle engineering; uncoupled braking energy recovery system; proportional relay valve; single neuron PID; hysteresis compensation; joint simulation
“双碳”背景下,电动化已成为现阶段商用车的主要发展方向之一,而制动能量回收对提高整车能量利用率具有重要意义[1-3]。解耦式制动能量回收系统(uncoupled braking energy recovery system, URBS)在原有制动系统上加装解耦装置,即可实现再生制动力与机械制动力的精确耦合,同时可优先采用电机制动力,有效提高制动能量回收效率[4-5]。在传统气压制动系统中,通过继动阀可有效缩短压力建立时间,但其动态特性复杂,且阀的开闭依靠气压控制,响应速度慢。而电控制动系统(electronically controlled brake system, EBS)采用比例继动阀,在电控模式下能进一步缩短压力建立时间与制动响应时间[6-7],同时保留了气控模式,可实现制动备份功能。此外,理论上比例继动阀的输入与输出间存在线性关系,相较于开关阀可准确输出制动气压,若将其应用于URBS,可提高制动力耦合精度,同时具备制动备份功能,保证了车辆的制动安全性。实际中,比例继动阀会受到气体的可压缩性、阀体内部结构差异以及阀芯运动时的摩擦力等因素影响,存在明显的迟滞特性,为实现比例继动阀的准确控制,必须对其迟滞特性进行补偿。
针对比例继动阀迟滞特性的补偿控制研究,韩正铁等[8]和HAN等[9]建立了比例继动阀的数学模型,并提出一种结合滞环补偿的PID控制算法,可对比例继动阀的迟滞特性进行有效补偿;李静等[10]提出一种基于神经网络和PID交互的控制算法,与传统PID控制算法相比,可显著提高比例继动阀的压力响应速度与控制精度。YOU等[11]采用前馈补偿结合积分抗饱和的PI控制,有效消除了比例继动阀输出气压的稳态误差。针对比例继动阀对整车性能影响的研究,游牟捷[12]将比例继动阀作为制动能量回收系统的气压调节模块,通过硬件在环试验研究了其对车辆制动平顺性及舒适性的影响。刘文涛等[13]、LI等[14]利用硬件在环试验,对比例继动阀在不同制动强度下的压力控制效果及制动平顺性进行了验证,发现相较于电磁开关阀,比例继动阀在压力调节及车辆制动平顺性方面更具优势。上述对整车性能影响的研究均基于前馈结合积分抗饱和PI控制,对比例继动阀应用于制动能量回收系统的优势进行了研究,并未考虑纯电动商用车在连续制动时因气源压力降低导致的耦合制动力响应速度慢、耦合精度低等问题。
为解决现有URBS在连续制动时因气源压力偏低造成驱动轴耦合制动力响应速度慢的问题,提出一种基于比例继动阀的URBS方案,并基于比例继动阀的迟滞特性,采用前馈-单神经元PID实现对比例继动阀的准确控制,以电池SOC、车速等为约束条件制定解耦式制动能量回收控制策略,并通过AMESim,MATLAB/Simulink及TruckSim搭建联合仿真平台,对基于比例继动阀的URBS的可行性及制动能量回收的有效性进行验证。
1 基于比例继动阀的URBS方案
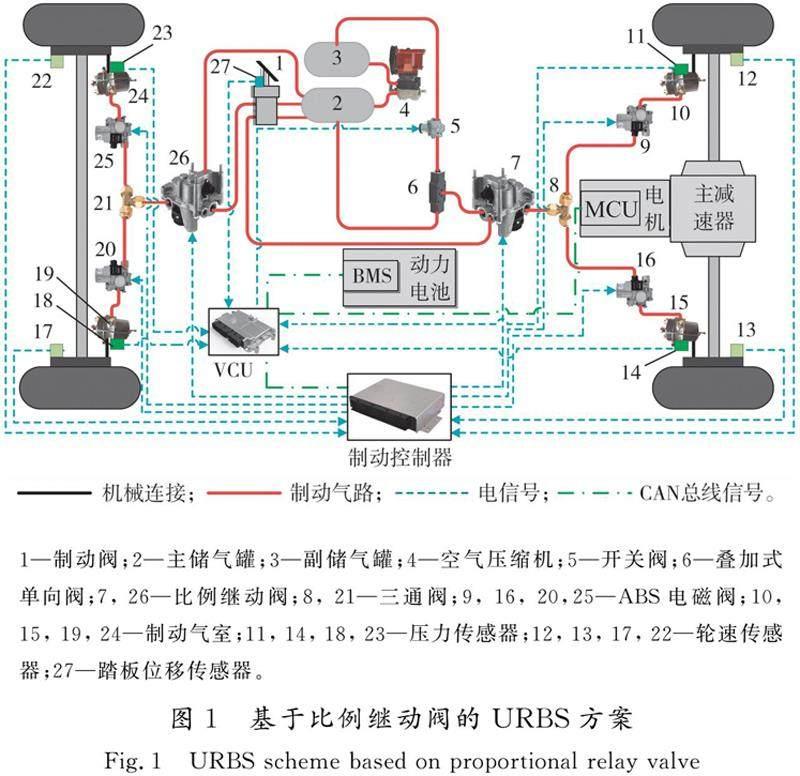
比例继动阀作为EBS的关键部件,具有应用于解耦式制动能量回收系统的优势,主要表现在:1)比例继动阀能有效缩短制动压力响应时间;2)通过加装压力传感器及制定相应控制算法即可实现再生制动力矩与机械制动力矩的解耦,制动系统的改动难度较小。所提出的基于比例继动阀的URBS方案如图1所示,该方案在原有气压ABS电磁阀的URBS上增加了副储气罐、开关阀和叠加式单向阀等部件,并将前、后轴原有继动阀替换为比例继动阀,使得驱动轴制动气路具有2个独立的高压气源和双回路结构,在制动能量回收时,可由较高气压的气源为驱动轮制动气室提供压力,有效解决因气源压力低带来的制动压力响应速度慢等问题,并可提高制动力响应速度与输出精度。同时,若比例继动阀的电控模式失效,其具备的传统气控模式仍可满足车辆的制动需求,能保证车辆的制动安全性。
基于比例继动阀的URBS主要由制动阀(1)、主储气罐(2)、副储气罐(3)、空气压缩机(4)、开关阀(5)、叠加式单向阀(6)、比例继动阀(7, 26)、三通阀(8, 21)、ABS电磁阀(9, 16, 20, 25)、制动气室(10,15,19,24)、压力传感器(11, 14, 18, 23)、轮速传感器(12, 13, 17, 22)、踏板位移传感器(27)、制动控制器、整车控制器(vehicle control unit, VCU)、电池系统及电机系统等组成,除比例继动阀、副储气罐、开关阀、叠加式单向阀外,其余均为原车已有部件。压力传感器负责测量各制动气室的制动压力,以实现前后轴制动力以及电机与后轴制动力的分配,压力信号通过低压线束传给VCU。轮速传感器负责测量车轮的速度,轮速信号由低压线束传给制动控制器;比例继动阀用于调节前、后轴的机械制动力矩,ABS电磁阀可调节各轮的机械制动力矩,二者均通过低压线束与制动控制器相连;制动控制器根据制定的控制算法输出相应控制信号,可分别控制比例继动阀与ABS电磁阀实现对制动力矩的调节。电机控制器(motor control unit, MCU)、电池管理系统(battery management system, BMS)、制动控制器与VCU之间通过CAN總线连接。
理论上比例继动阀的输出与输入呈线性关系,相较于ABS电磁开关阀,比例继动阀的输出气压更为精确,有利于机械制动力与再生制动力的耦合。因此在制动能量回收时,选择比例继动阀作为调压模块,ABS电磁阀仅在紧急制动时工作,可有效提高整车经济性与制动安全性。
2 比例继动阀的前馈-单神经元PID控制
AMESim是气压、液压领域常用的仿真软件,其采用键合图的建模方法,可方便、准确地建立出多学科领域的系统模型。基于比例继动阀的结构及工作原理[8,10],利用AMESim建立的比例继动阀仿真模型如图2所示。
比例继动阀因具有非线性、参数不确定的特点,通常采用PID控制,但存在迟滞特性无法得到有效补偿的问题,结合前馈补偿的PID控制可实现对迟滞特性的有效补偿,但其对于不同范围气压的适应性较差,存在较明显的稳态误差。单神经元PID具有自学习和自适应能力,且该控制方法鲁棒性强、结构简单,能够克服PID控制随动性差的缺点[15-16],可针对比例继动阀因系统非线性及参数不确定而难以准确控制的问题提供更好的解决方案。因此,本文采用前馈-单神经元PID控制比例继动阀,对迟滞特性进行补偿,其原理见图3。
图3中,r(k)为目标气压值,p(k)为实际输出气压值,u(k)为电流信号,状态转换输出的x1(k),x2(k)和x3(k)为单神经元学习所需的状态量。
x1(k)=r(k)-p(k)=e(k),x2(k)=e(k)-e(k-1),x3(k)=e(k)-2e(k-1)+e(k-2)。(1)
单神经元PID控制可通过调节权重系数完成PID参数的自适应整定,采用有监督的Hebb学习规则[17-18],其控制算法及学习规则为
u(k)=u(k-1)+K∑3i=1w′i(k)xi(k),(2)
w′i(k)=wi(k)∑3i=1|wi(k)|,(3)
w1(k)=w1(k-1)+ηIe(k)u(k)x1(k),w2(k)=w2(k-1)+ηPe(k)u(k)x2(k),w3(k)=w3(k-1)+ηDe(k)u(k)x3(k),(4)
式中:K为单神经元比例系数,K>0;wi(k)为xi(k)对应的权重系数,i=1,2,3;ηI,ηP和ηD分别为积分、比例、微分系数的学习速率。
为验证前馈-单神经元PID对比例继动阀的静态控制效果,在0.4和0.6 MPa阶跃工况下,将前馈-单神经元PID与传统PID、前馈-PID、前馈-模糊PID控制进行了对比,分别如图4 a)、图4 b)所示。在0.4 MPa阶跃工况下,基于PID和前馈-PID控制的输出气压具有明显的超调,且达到稳态时输出气压与目标值间存在明显误差,分别为0.012和0.029 MPa;基于前馈-模糊PID控制下的输出气压虽超调较小,但其在接近稳态时与目标值间存在误差,如0.31 s时输出气压为0.384 MPa,与目标值间的误差为0.016 MPa,而基于前馈-单神经元PID控制的输出气压达到稳态时与目标值间的误差仅为0.003 MPa。在0.6 MPa阶跃工况下,基于PID和前馈-PID控制的稳态误差分别为0.010和0.034 MPa;基于前馈-模糊PID控制下的输出气压在接近稳态时仍与目标值间存在误差,在0.55 s时误差降至0.005 MPa,而基于前馈-单神经元PID的输出气压与目标气压间的稳态误差为0.002 MPa,且达到稳态的速度优于其他控制。通过对比可以看出,基于前馈-单神经元PID的控制效果相较于其他3种控制方法具有明显优势,稳态误差得到有效降低,且相较于静态增压特性达到稳态压力值75%的时间减小0.02 s,前馈-单神经元PID控制可实现输出压力的准确控制,并提高了输出气压的响应速度。
为验证前馈-单神经元PID对比例继动阀的动态控制效果,在连续阶梯增减压工况下,将前馈-单神经元PID与前馈-PID、前馈-模糊PID控制效果进行对比,如图5所示。在前馈-PID控制下,输出气压在0.8 MPa时可实现对目标压力值的准确跟随,但在低压范围内对目标压力值的跟随效果较差,目标气压为0.1 MPa时,增减压过程中的最大稳态误差为0.036 MPa;在前馈-模糊PID控制下,目标压力的跟踪效果良好,相较于前馈-PID,台阶处的稳态误差明显降低,但在达到目标压力值初期,存在一定超调,超调量最大为10%;而在前馈-单神经元PID控制下,比例继动阀的输出压力可实现对目标压力变化趋势及数值的准确跟随,差值最大为0.002 MPa,前馈-单神经元PID可实现对比例继动阀的准确控制。
3 解耦式制动能量回收策略
前后轴制动力的不合理分配会对车辆制动时的方向稳定性及路面附着系数的利用程度产生影响,可能会出现前轮先抱死、后轮先抱死或者前后轮同时抱死3种情况。前后轮同时抱死时,既可保证车辆制动时的方向稳定性,又能提高路面附着系数的利用率,此时对应的制动力分配曲线为I曲线[19],可由式(5)表示。
Fbr=12Ghgb2+4hgLGFbf-(Gbhg+2Fbf),(5)
式中:Fbr为后轴制动力;Fbf为前轴制动力;G为车辆重力;hg为质心高度;a,b分别为质心到前、后轴的距离;L为轴距。
在保证车辆制动安全的前提下,将更多的制动力分配给驱动轴可有效提高整车制动能量回收效率[20-21]。前后轴制动力分配曲线如图6所示:当z≤0.1时,为回收更多的制动能量,按OA线分配,即仅由后轴提供总需求制动力;当0.1<z≤0.2时,按AB线分配制动力,前轴制动力占比逐渐增加;当z>0.2时,为确保整车的制动安全性,前后轴按照I曲线分配制动力。
制定的解耦式制动能量回收控制策略流程如图7所示,图中:PedalB_S为制动踏板位移,该信号由踏板位移传感器输出;ABS_active为ABS触发标志位;Switch_active为开关阀触发标志位;SOC为电池荷电状态;v为车速;Fbra为总需求制动力;Fbf为前轴需求制动力;Fbr为后轴需求制动力;Fmor为再生制动力;Fm_max为最大再生制动力;Fbr_me为后轴机械制动力;F0为z=0.1时的后轴制动力阈值。当PedalB_S≤0时,URBS退出;当ABS_active为1时,表明ABS功能被触发,考虑到车辆的制动安全此时退出制动能量回收模式。当SOC<90%且v>10 km/h时,允许开启制动能量回收模式。當z<0.7时,若主储气罐压力信号小于需求压力信号时,Switch_active=1,此时开关阀为导通状态,驱动轴制动气路此时变为双回路供压,Switch_active=0时,开关阀为关闭状态;电机输出最大再生制动力,若其无法满足后轴需求制动力,则不足部分由后轴机械制动力补充;当z≥0.7时,为保证汽车的制动安全,制动能量回收模式关闭,仅由机械制动力提供总需求制动力。
为衡量解耦式制动能量回收系统的制动能量回收效果,采用有效制动能量回收率λ作为制动能量回收效果的评价指标[22],见式(6)。
λ=EbEz ,(6)
式中:Eb为制动过程中回收的能量;Ez为整车消耗的能量。
制动气室输出气压与制动力矩之间的关系[23]如下:
Tp=kpP ,(7)
式中:Tp为气压制动力矩;kp为比例系数,由试验标定得到;P为制动气室中的气体压力。
4 仿真结果分析
为验证基于比例继动阀的URBS方案的可行性及经济性,电池初始SOC设为90%,路面附着系数设为0.8。车辆及主要部件参数如表1所示。基于AMESim,MATLAB/Simulink及TruckSim搭建联合仿真平台,其原理如图8所示。
考虑到中国重型商用车行驶工况(China heavy-duty commercial vehicle test cycle for heavy truck,CHTC-HT)、中国重型商用车瞬态工况(China world transient vehicle cycle,C-WTVC)中制动强度大于0.1的工况区间较少,为验证制动强度大于0.2时基于比例继动阀的URBS可行性及控制策略的有效性,选取初始车速为65 km/h的单次制动工况和CHTC-HT与C-WTVC工况进行验证。
4.1 单次制动工况下的制动能量回收效果验证
为验证解耦式制动能量回收控制策略的有效性及制动力的耦合效果,选择制动强度为0.5的单次制动工况,车速变化如图9所示。
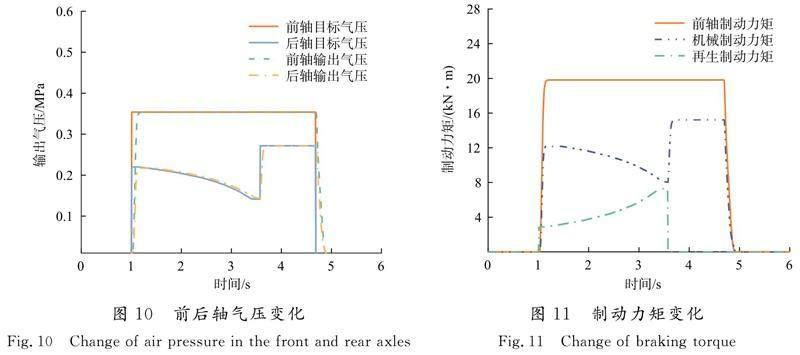
當制动强度大于0.2时,前后轴制动力按照I曲线分配。在1.0 s时车辆开始减速,前、后轴输出气压及制动力矩变化分别如图10、图11所示。通过安装比例继动阀,前轴能准确跟踪目标气压值,达到稳态压力值75%的时间为0.09 s;减压过程中输出气压在4.90 s降至0,滞后时间小于0.19 s。后轴制动力矩由再生制动力矩与机械制动力矩共同提供。在3.61 s时。SOC达到阈值,制动能量回收模式关闭,再生制动力矩变为0,此时由前、后轴机械制动力矩提供需求制动力矩。
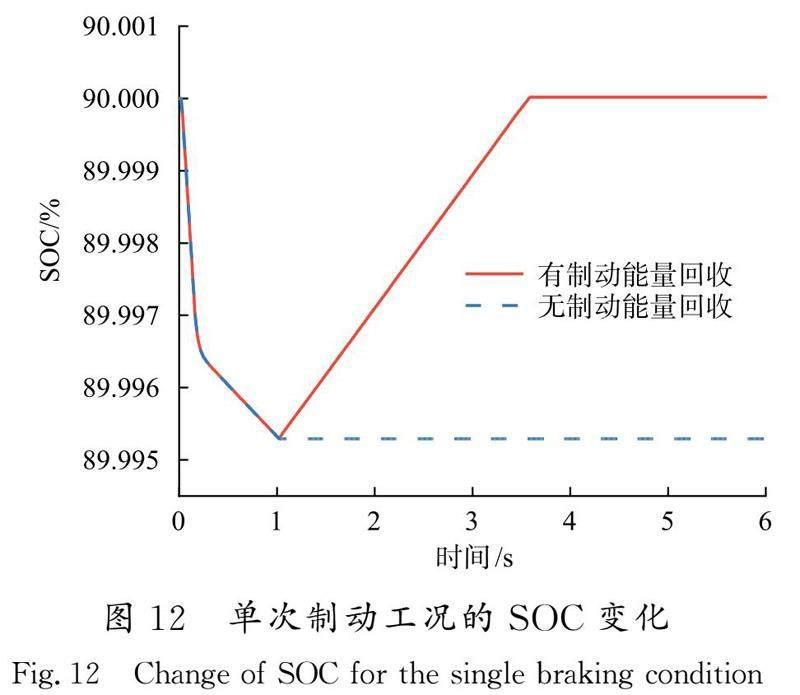
单次制动工况下有、无制动能量回收时的电池SOC变化如图12所示,初始车速为65 km/h,SOC由90%逐渐降低,在1.0 s时,车辆开始减速,无制动能量回收时的电池SOC保持为89.995%不再变化;有制动能量回收时的电池SOC逐渐增加,至3.61 s时达到SOC阈值90.000%,此时关闭制动能量回收,在制动强度为0.5的单次制动工况下,基于比例继动阀的URBS可实现制动能量的有效回收。
4.2 循环工况下的制动能量回收效果验证
为验证基于比例继动阀的URBS可行性及控制策略的有效性,选取CHTC-HT与C-WTVC工况进行验证。以CHTC-HT工况为例,对工况过程进行具体分析。在CHTC-HT工况中,制动强度大于0.1的工况区间较少,因此车辆制动时多处于制动能量回收模式,车速变化如图13所示,实际车速可准确跟随目标车速,这表明基于比例继动阀的URBS可满足车辆对制动压力的调节需求。
制动能量回收过程中,后轴实际制动力矩由机械制动力矩与再生制动力矩耦合组成。图14为1 752~1 759 s时的后轴制动力矩变化曲线,由图14可知,实际制动力矩可准确跟踪需求制动力矩的变化。在1 752.6 s出现超调,超调量为509.9 N·m,超调时间小于0.1 s;在1 752.5~1 755.9 s,1 757.0~1 757.7 s内再生制动力矩无法独自满足制动力矩需求,由机械制动力矩与再生制动力矩耦合满足制动力矩需求;1 757.7 s后,再生制动力矩可独自满足需求制动力矩,后轴制动力矩仅由电机提供。
安装于后轴的比例继动阀输出气压变化如图15所示,输出压力可准确跟随目标压力的变化。制动气压滞后会导致制动拖滞,若滞后时间过长,会造成制动盘过热,影响制动效能。在1 755.9 ~1 756.1 s,输出压力由0.052 MPa降至0 MPa,滞后时间小于0.3 s,可满足车辆制动需求。前馈-单神经元PID控制下的比例继动阀可准确输出制动压力,满足解耦式制动能量回收系统的压力调节需求。
CHTC-HT,C-WTVC工况下的电池SOC变化分别如图16 a)、图16 b)所示,在1 800 s时,CHTC-HT工况下有制动能量回收时的电池SOC为85.29%,无制动能量回收时的电池SOC为84.76%;在C-WTVC工况下有制动能量回收时的电池SOC为84.79%,无制动能量回收时的电池SOC为83.71%。
2种行驶工况的能量变化如图17所示。在CHTC-HT工况中整车消耗总能量为41.18 MJ,制动过程中电池回收的能量为4.17 MJ,有效制动能量回收率为10.13%;在C-WTVC工况中整车消耗总能量为49.45 MJ,制动过程中电池回收的能量为8.49 MJ,有效制动能量回收率为17.17%。
通过初始车速为65 km/h的单次制动工况与CHTC-HT,C-WTVC工况的验证,基于比例继动阀的URBS方案可提高耦合制动力的响应速度,制动压力达到稳态压力值75%的时间小于0.1 s,同时采用前馈-单神经元PID控制的比例继动阀可准确输出气压制动力,且能满足解耦式制动能量回收系统的压力调节需求。在制定的解耦式制动能量回收控制策略下,该系统能实现制动能量的有效回收,可提高纯电动商用车的能量利用率。
5 结 语
为解决纯电动商用车在连续制动时因气源压力过低造成耦合制动力响应速度慢、影响制动能量回收效率的问题,针对基于比例继动阀的纯电动商用车URBS方案进行了研究,主要结论如下。
1)在基于ABS电磁阀的URBS基础上提出了一种基于比例继动阀的URBS方案,通过对原有气路的改装,使驱动轴制动气路具备2个独立高压气源以及双回路结构,能有效提高耦合制动力的响应速度与耦合精度,并可使系统具备制动备份功能。
2)迟滞特性会造成比例继动阀响应滞后、输出气压存在稳态误差等问题,影响整车经济性及制动舒适性,通过采用前馈-单神经元PID控制,自适应调整权重系数,可实现输出气压的准确控制,有效补偿了系统的迟滞特性。
3)在电池SOC、车速等约束条件下,以气源压力信号确定供压模式,制定了解耦式制动能量回收控制策略,并对基于比例继动阀的URBS方案的可行性及经济性进行仿真验证。结果表明,基于比例继动阀的URBS方案可有效提高耦合制动力的响应速度与耦合精度,能够实现制动能量的有效回收,在CHTC-HT与C-WTVC工况下,有效制动能量回收效率分别为10.13%和17.17%。
本文仅是以整车固定载荷制定前后轴制动力分配规则,为保证车辆在不同载荷条件下的安全性,未来应考虑车辆载荷识别以及车辆发生侧滑等情况。
参考文献/References:
[1] 马建,李学博,赵轩,等.电动汽车复合制动控制研究现状综述[J].中国公路学报,2022,35(11):271-294.MA Jian,LI Xuebo,ZHAO Xuan,et al.Review of electro-mechanical composite braking control for electric vehicles[J].China Journal of Highway and Transport,2022,35(11):271-294.
[2] HAMADA A T,ORHAN M F.An overview of regenerative braking systems[J].Journal of Energy Storage,2022,52.DOI: 10.1016/j.est.2022.105033.
[3] ZHANG Xudong,GHLICH D,LI Jiayuan.Energy-Efficient toque allocation design of traction and regenerative braking for distributed drive electric vehicles[J].IEEE Transactions on Vehicular Technology,2018,67(1):285-295.
[4] 楊坤,王杰,郭栋,等.基于气压ABS电磁阀的解耦式制动能量回收[J].北京工业大学学报,2020,46(3):227-235.YANG Kun,WANG Jie,GUO Dong,et al.Uncoupled braking energy recovery system based on pneumatic ABS solenoid valve[J].Journal of Beijing University of Technology,2020,46(3):227-235.
[5] 杨坤,高松,王杰,等.基于EMB的解耦式制动能量回收系统研究[J].汽车工程,2016,38(9):1072-1079.YANG Kun,GAO Song,WANG Jie,et al.A study of decoupled brake energy recovery system based on electro-mechanical brake[J].Automotive Engineering,2016,38(9):1072-1079.
[6] BAO Hanwei,WANG Zaiyu,LIU Zihao,et al.Study on pressure change rate of the automatic pressure regulating valve in the electronic-controlled pneumatic braking system of commercial vehicle[J].Processes,2021,9(6).DOI: 10.3390/pr9060938.
[7] ZHENG Hongyu,MA Shenao,LIU Yahui.Vehicle braking force distribution with electronic pneumatic braking and hierarchical structure for commercial vehicle[J].Journal of Systems and Control Engineering,2018,232(4):481-493.
[8] 韩正铁,宗长富,赵伟强,等.商用车EBS系统比例继动阀特性与控制方法[J].农业机械学报,2014,45(10):1-6.HAN Zhengtie,ZONG Changfu,ZHAO Weiqiang,et al.Characteristics and control method of proportional relay valve for commercial vehicle EBS[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(10):1-6.
[9] HAN J,ZHAO Weiqiang,ZONG Changfu,et al.Research on characteristics of proportional relay valve for commercial vehicle pneumatic EBS[C]//SAEINDIA International Mobility Conference and Exposition.Chennai:[s.n.],2013:21997-22003.
[10]李静,户亚威,石求军,等.电动大客车比例继动阀仿真控制研究[J].机械设计与制造,2017(9):1-4.LI Jing,HU Yawei,SHI Qiujun,et al.Research on simulation control of proportional relay valve in electric bus[J].Machinery Design & Manufacture,2017(9):1-4.
[11]YOU Mujie,ZHANG Junzhi,SUN Dongsheng,et al.Characteristics analysis and control study of a pneumatic proportional valve[C]//2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC).Chongqing:[s.n.],2015:242-247.
[12]游牟捷.電驱动客车制动能量回收系统气压调节模块研究[D].北京:清华大学,2016.YOU Moujie.Research on Pneumatic Modulating Actuators of Regenerative Braking Systemin Electric Bus[D].Beijing:Tsinghua University,2016.
[13]刘文涛,于涛,张俊智.电驱动客车制动能量回收气压调节模块研究[J].液压与气动,2017(3):6-16.LIU Wentao,YU Tao,ZHANG Junzhi.Pressure regulating module of regenerative braking in electric bus[J].Chinese Hydraulics & Pneumatics,2017(3):6-16.
[14]LI Ning,HE Chengkun,ZHANG Junzhi,et al.Research on the influence of the proportional relay valve on the economy and safety of the electric bus through the braking energy recovery system[J].Energy Sources,Part A:Recovery,Utilization,and Environmental Effects,2023,45(3):8896-8914.
[15]赵芃沛,孟卫锋,史永杰,等.基于单神经元自整定PID的稳定平台调平控制[J].兵器装备工程学报,2023,44(1):183-187.ZHAO Pengpei,MENG Weifeng,SHI Yongjie,et al.Leveling control of an inertial platform based on single neuron self-tuning PID[J].Journal of Ordnance Equipment Engineering,2023,44(1):183-187.
[16]LIU Xiaofeng,XIE Xinhua.Based on single neuron PID control of vehicle active suspension system[J].Applied Mechanics and Materials,2013,380/381/382/383/384:528-531.
[17]QIN Yanding,DUAN Heng.Single-Neuron adaptive hysteresis compensation of piezoelectric actuator based on Hebb learning rules[J].Micromachines,2020,11(1).DOI: 10.3390/mi11010084.
[18]聂松林,李芹,尹方龙,等.直驱泵系统的单神经元PID+前馈控制策略[J].北京工业大学学报,2019,45(9):821-830.NIE Songlin,LI Qin,YIN Fanglong,et al.Single neuron PID+ feedforward controller of a direct drive pump system[J].Journal of Beijing University of Technology,2019,45(9):821-830.
[19]LI Shengqin,YU Bo,FENG Xinyuan.Research on braking energy recovery strategy of electric vehicle based on ECE regulation and I curve[J].Science Progress,2020,103(1).DOI: 10.1177/0036850419877762.
[20]许世维,唐自强,王栋梁,等.电动商用车的串联制动控制策略[J].甘肃农业大学学报,2016,51(4):113-120.XU Shiwei,TANG Ziqiang,WANG Dongliang,et al.Series braking control strategy of electric commercial vehicle[J].Journal of Gansu Agricultural University,2016,51(4):113-120.
[21]ZHOU Shilei,WALKER P,ZHANG Nong.Parametric design and regenerative braking control of a parallel hydraulic hybrid vehicle[J].Mechanism and Machine Theory,2020,146.DOI: 10.1016/j.mechmachtheory.2019.103714.
[22]智东敏,武志斐.纯电动轻型物流车制动能量回收控制策略研究[J].科学技术与工程,2016,16(25):311-316.ZHI Dongmin,WU Zhifei.Study on braking energy recovery control strategy of pure electric light logistics vehicle[J].Science Technology and Engineering,2016,16(25):311-316.
[23]张渊博,王伟达,张华,等.基于新型改进遗传算法的混合动力客车高效制动能量回收预测控制策略研究[J].机械工程学报,2020,56(18):105-115.ZHANG Yuanbo,WANG Weida,ZHANG Hua,et al.Research on modified genetic algorithm-based high efficiency predictive regenerative braking control strategy for hybrid electric bus[J].Journal of Mechanical Engineering,2020,56(18):105-115.
責任编辑:冯民
基金项目:国家自然科学基金(51605265);山东省重点研发计划资助项目(2018GGX105010)
第一作者简介:黄壮壮(1998—),男,山东德州人,硕士研究生,主要从事新能源汽车关键技术及动力学控制方面的研究。
通信作者:杨坤,教授。E-mail:yangkun_sdut@163.com黄壮壮,杨坤,王戈,等.基于比例继动阀的解耦式制动能量回收[J].河北科技大学学报,2024,45(2):131-140.HUANG Zhuangzhuang,YANG Kun,WANG Ge,et al.Uncoupled braking energy recovery system based on proportional relay valve[J].Journal of Hebei University of Science and Technology,2024,45(2):131-140.