露天矿边坡裂隙智能识别与信息解算
2024-05-03赵怡晴黄晢航刘宏发金爱兵刘金博
赵怡晴,黄晢航,刘宏发,金爱兵,陆 通,刘金博
1) 北京科技大学土木与资源工程学院,北京 100083 2) 金属矿山高效开采与安全教育部重点实验室,北京 100083 3) 湖南柿竹园有色金属有限责任公司,郴州 423037
露天矿边坡,在采动和自然作用下可能会发生失稳、滑坡等灾害,严重影响矿山安全生产.因此,针对露天矿边坡开展稳定性分析在露天矿山生产活动中占有重要作用.而岩质边坡的稳定性主要受岩体节理裂隙的影响,快速准确获取组成边坡岩体的裂隙信息对于边坡稳定性分析具有十分重要的作用.传统的人工测量方法工作量大、效率低、不全面,往往会影响边坡稳定性分析速度和准确性[1].
随着图像处理技术以及机器视觉技术的发展,采用智能算法进行节理裂隙识别成为热点,国内外许多学者对从图像中提取裂隙进行了深入研究.靳华中等[2]使用HOG (Histogram of oriented gradients)特征作为路面裂纹的强度及方向特征,并使用分水岭算法分割出裂纹区域的边缘.Wang等[3]使用了多种自适应滤波器和对比度增强来去除各类背景噪声干扰,并获得微小裂隙信息,再使用局部自适应的Otsu算法对裂隙区域进行分割.张愉玲等[4]提出一种新的岩石图像修复算法,根据设定的阈值,对提取的图像间断部分进行搜索并连接,同时去除修复过程产生的多余特征.郑江韬等[5]用Waifu2x卷积神经网络模型对裂隙煤岩计算机断层扫描(Computed tomography)图像进行处理,获得分辨率更高的CT图像,并提出“裂隙煤岩标注七步处理法”,提高了标记效率.李尧等[6]结合地质雷达结合BP (Backpropagation)网络进行岩块裂隙的识别.Xie等[7]使用均值及多尺度Hessian滤波进行去噪和裂隙增强,并使用形态学算子及阈值分割分离出裂隙区域.Tang等[8]设计一种暗区曲线结构增强(DRCSE)算法来提取裂隙骨架,将同态滤波方法和伽马转化方法结合降低阴影对图像提取的影响,提高了裂隙骨架像素点的完整性.刘凡凡等[9]采用基于连通域之间的相关性拼接细小裂缝,通过Hough变获取裂缝直线,提高了裂隙识别的完整度.此外,也有学者提出了其他的算法[10-13].这些研究对图像中裂隙特征明显的图像有着较好的识别效果,但直接应用到背景较为复杂、干扰噪声多的边坡图像数据中提取出理想的裂隙特征较为困难,且需要人为定义特征参数.
近些年来随着深度学习技术的发展,各种基于深度学习的图像分割网络模型如Fully convolutional network (FCN)、U-net等[14-19]被应用于各种场景下裂隙的解析于识别,此类深度学习模型通过训练数据集并学习图像中高维图像特征,对各类图像特征提取有较好的泛化性和鲁棒性.薛东杰等[20]运用FCN网络对岩体表面迹线进行识别,验证了全卷积神经网络可以高效识别岩体表面的所有裂隙.Zhang等[21]运用传统U-net网络对沥青路面裂隙进行解码与编码,获得了好的识别结果.与此同时许多学者也对经典的深度学习模型进行优化改进,景莹等[22]基于改进Mask region-based convolutional neural network(MR-CNN)网络对露天矿边坡裂隙进行检测,解决了边坡裂隙边缘粗糙的问题.哈纳提等[23]基于注意力机制对FCN网络进行改进,对混凝土表面复杂裂隙有更好的识别效果.张紫衫等[24]基于空洞卷积对U-net网络进行改进,对高陡岩质节理边坡进行裂隙识别并自动提取裂隙面的几何信息参数,相比于U-net网络有着更高的识别精度.
综上所述,深度学习模型的出现提高了对裂隙识别的准确性和效率,而对深度学习中经典模型的改进能够进一步提高裂隙识别的准确性,且基于不同的改进方式有着不同方面的提升.随着深度学习模型网络层次的加深,获取的图像特征越丰富,但网络层次的加深会碰到梯度爆炸和梯度消失问题导致测试和训练的准确率下降,残差网络(ResNet)[25]可以采用残差结构克服此类问题,使网络获取更多图像特征,追求深度学习网络中最优化的网络层次.为此,本文拟采用ResNet系列网络改进U-net网络的骨架网络,对露天矿山边坡表面裂隙进行识别,提高边坡裂隙识别的准确率,并对识别出的裂隙进行解译,获取裂隙几何参数信息.
1 实验图像数据
1.1 数据采集
为建立用于深度学习露天矿边坡裂隙图像数据集,需对矿山边坡进行图像采集,但高陡边坡的图像采集工作存在一定的风险性,复杂多变的地质条件加大了人工手持相机进行图像采集的难度,因此采用大疆无人机综合考虑视角、距离、重叠率以及飞行速度等因素对露天矿山边坡进行航拍,具体航拍参数见表1,采集边坡岩体高清裂隙图像123张,部分露天矿山边坡岩体裂隙图像如图1所示,构建边坡裂隙图像识别原始数据集.

图1 露天矿山边坡岩体裂隙图像Fig.1 Photograph of the slopes with rock mass cracks in an open pit mine

表1 边坡航测飞行参数Table 1 Slope aerial survey flight parameters
1.2 图像数据增广与标签制作
因无人机航拍所获取的原始图像数量有限且图像分辨率和背景噪音过大,需扩充数据集的样本数量以制作用于深度学习的裂隙图像数据集.首先,使用全局阈值分割技术对图像进行预处理,根据不同的原始图像选择对应分割阈值以确保所选择的块包含完整、特征明显可见的裂隙;然后将原始高清图像分割为512×512像素点的块,扩充样本图像数量至563张,如图2(a)所示.
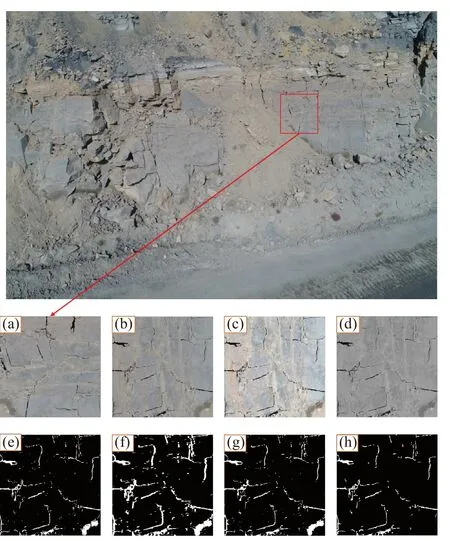
图2 图像处理流程.(a) 整图分割; (b) 随机旋转; (c) 随机亮度及对比度调整; (d) 灰度化; (e) 阈值分割; (f) 膨胀; (g) 腐蚀; (h)删除连通域Fig.2 Image data processing process: (a) whole graph segmentation;(b) random rotation; (c) random brightness and contrast adjustment;(d) grayscale; (e) threshold segmentation; (f) expansion; (g) corrosion;(h) delete the connected domain
为了增加神经网络训练的鲁棒性,对所有的边坡裂隙样本图像进行随机旋转、随机亮度及对比度调整.随机旋转是将图片进行随机角度的旋转,与原图像产生差异,如图2(b)和(c)所示.随机亮度及对比度调整为使用灰度均值µ及均方差σ描述图像X的亮度及对比度,调整方式定义如式(1)和(2)所示[26]:
式中,Xi为第i个像素的灰度值;m为像素数量.
为提高变换后的图像与原图像的差异性,建立变换系数η,如式(3)所示[26]:
为保证增强图像的随机性,建立正态分布曲线,其均值与标准差设为255η与2η,生成服从该分布的新亮度值及新对比度值2ησ.增强后的图像,如式(4)所示:
式中,ε为一个极小值常数.
经过式(1)~(4)的调整后,可以保证增强后的裂隙图像与原图像有明显的差异,且具有随机性.通过随机旋转、随机亮度及对比度调整将裂隙图像数据集增广至2000张,解决了裂隙训练样本图像不足的问题,同时统一图像样本尺寸,可以提高训练中裂隙特征提取的效率,降低模型收敛时间.
为排除背景噪声干扰,制作满足深度学习模型的裂隙标签图像,需对增广后的图像数据集进行预处理操作:首先,为简化后续处理操作,对裂隙图像数据集进行灰度化,将RGB通道中的3个颜色通道合并为单一的亮度通道,如图2(d)所示;其次,为凸显裂隙的边界和特征,再次采用全局阈值分割技术对灰度化图像进行处理以获取二值化图像,如图2(e)所示;再次,在二值图像中对裂隙轮廓进行膨胀操作助于强化裂隙的形态特征,使裂隙轮廓更加连续完整,膨胀后图像如图2(f);第四,通过腐蚀操作使裂隙轮廓变得更加紧凑和连续,同时消除裂隙边界上的小断裂、孤立点或噪声,如图2(g);最后,通过四邻域识别出裂隙连通域,并删除代表裂隙中噪声等无关特征的微小连通域,排除背景噪声干扰,如图2(h).通过一系列的图像处理操作,完成裂隙标签图,并将裂隙图像和裂隙标签图像按照8:2划分为训练集和测试集用于深度学习模型训练.
2 U-net模型改进
2.1 U-net模型
U-net网络[15]是基于FCN网络进行改进而提出的一种全卷积网络,相比较于其他网络,U-net网络可以使用少量的数据进行训练并有着较高的分割精度.其网络结构如图3所示,由特征提取部分和上采样部分组成,两部分完全对称,左右结构相似,类似于U型,因此命名为U-net.左侧特征提取部分主要有4个阶段,每个阶段采用2个3×3的卷积核、1个2×2的最大池化层和ReLU激活函数,每经过一个提取阶段后尺度升高,通道数翻倍;右侧上采样部分主要有4个阶段,每个阶段两个3×3卷积核和1个2×2的反卷积层,图像特征每经过一个上采样阶段后尺度降低,通道数减半,与特征提取部分对应阶段的相同尺度图像通道数融合,对特征图进行复制或裁剪的操作,最后采用1×1的卷积核进行分类,输出图像的前景和背景.
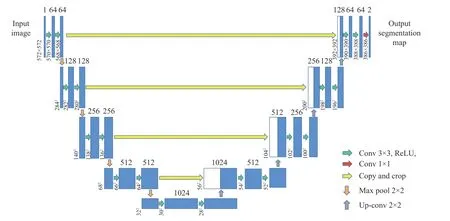
图3 U-net网络结构[15]Fig.3 Structure diagram of U-net[15]
2.2 改进U-net模型
由于边坡裂隙特征较为复杂,U-net模型受限于网络层次深度无法完全提取裂隙特征,因此需要对U-net模型进行改进.假设卷积神经网络中存在多余的网络层次即冗余层时,若冗余层能够完成恒等映射,即经过该层的输入和输出相同,这种方式在加深网络的同时,既不增加额外参数,也不增加计算的复杂度,将冗余层修改成一个残差块,如图4(a)所示,x为这一层残差块的输入,也称作F(x)为残差,F(x)是经过第一层线性变化并激活后的输出,图中表示在残差网络中,第二层进行线性变化之后激活之前,F(x)加入了这一层输入值x,然后再进行激活后输出.在第二次输出值激活前加入x,此路径称为跳跃连接.之后该层的神经网络可以不用学习上一层网络的输出,而是学习上一个网络输出的残差,即为ResNet[25].
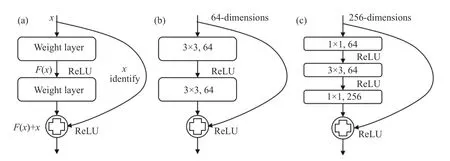
图4 ResNet构成模块.(a) ResNet模块; (b) 双层卷积结构; (c) 三层卷积结构Fig.4 ResNet building blocks: (a) ResNet module; (b) double convolutional layer structure; (c) triple convolutional layer structure
设h(x)=F(x)+x,当x与F(x)维度不同时,对Identity块加入参数Ws来保持Ws×x的维度与F(x)维度一致.当x与F(x)维度相同时,如式(5):
当x与F(x)维度不相同时,如式(6):
常见的残差块连接如图4所示,当ResNet网络层数小于50层时,采用图4(b)方式构建网络,当网络层数大于50层时采用图4(c)方式构建网络.
经典Res-UNet模型集成了U-Net和ResNet的深度学习模型,继承了U-Net在图像分割中展现的强大能力,能够有效地生成精细的分割图像,同时通过使用ResNet的残差连接,可学习各种层级的特征并避免训练过程中的梯度消失问题.本文所改进的U-net模型不只是简单的使用ResNet的残差连接,通过不同网络层次的网络构建方式,随着网络层次的加深可以从更高维度获取裂隙特征,且并不会过多增加网络参数,从而可以获取更完整、特征结构更清晰地裂隙.
在U-net模型中加入ResNet,可以加深U-net的网络层次同时不大量增加网络参数,随着网络层次的加深,模型能够从更高维度提取裂隙特征,最终输出更为完整的裂隙.本文采用ResNet18、ResNet34、ResNet50、ResNet101和ResNet152共5种模型对U-net模型的骨干架构网络进行改进,记为Res18-Unet、Res34-Unet、Res50-Unet、Res101-Unet和Res152-Unet.U-net模型和5种改进模型参数量见表2,通过参数量对比可知,U-net与改进网络属于同量级的网络.

表2 参数量对比Table 2 Comparison of parameters
图5展示了ResNet18模型和U-net模型相结合,改进U-net的骨干架构网络,在特征提取的4个阶段中采用两个残差块代替原来的2个3×3卷积核,在上采样的4个阶段中用一个残差块代替原来的1个3×3卷积核,在训练过程中使得每一层神经网络的输入保持相同分布,能更好地提取图像中的特征,比以前更容易训练.这种改进方法保证了模型图像输出和输入尺寸保持一致,同时也使得网络可以得到比较少的参数而不损失精度,提升了模型的训练速度.
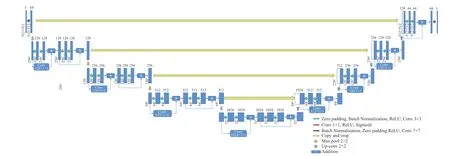
图5 Res18-Unet网络结构Fig.5 Structure diagram of Res18-Unet
3 裂隙识别及分析
软件环境采用编程语言Python 3.8,使用深度学习框架Tensorflow 2.4和CUDA 10.0.硬件环境采用处理器Intel i7-8750K CPU @4.20GHz,16GB和GPU NVDIA GTX 3060,12GB.
3.1 网络配置
(1) 激活函数.
裂隙图像训练集中含有大量复杂的高密度特征,神经网络特征提取部分可以将图像中的关键特征进行提取,为了更方便解开裂隙特征之间的复杂关系,通过引入ReLU激活函数和Sigmoid激活函数,如式(7)和(8)所示,将裂隙图像中的高密度特征转化为稀疏特征,使得提取出的裂隙关键特征更具备鲁棒性.
ReLU函数和Sigmod函数的曲线如图6所示.ReLU函数是一种具有单侧抑制特性的激活函数,卷积神经网络经过ReLU函数后输出为0的神经元越多,特征稀疏性越强,提取出来的特征更具有代表性,泛化能力越强,用于神经网络特征提取层之间的激活函数.Sigmoid函数取值范围为(0,1),它可以将一个实数映射到(0,1)的区间,用来做二分类激活函数较为平滑、易于求导,用于神经网络图像输出层的激活函数.
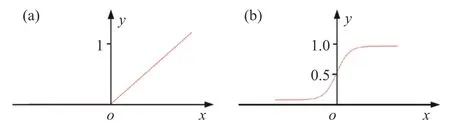
图6 激活函数.(a) ReLU函数曲线; (b) Sigmoid函数曲线Fig.6 Activation function: (a) ReLU function curve; (b) Sigmoid function curve
(2) 损失函数.
二元交叉损失熵(Binary crossentropy, BCE)是一种将边坡中的裂隙和背景看成一个二项分布,变成是一个二分类情况.对于二分类的交叉熵,随机变量有两个概率,一个概率为,一个概率为1-,将裂隙标签值b视作先验分布,为模型分布,其中的输出值在(0,1).对于批量图像样本(a1,b1),(a2,b2)···(an,bn),则可以对交叉熵求和或求均值:
由于在深度学习中采用Sigmoid激活函数,使用BCE作为损失函数可以克服Sigmoid函数在反向传播梯度时出现梯度消失的情况.
(3) 优化器.
优化器用于网络训练过程中更新模型参数,使损失函数降到最低.Adam梯度下降算法相当于Rmsprop梯度下降法和Momentum梯度下降法的改进,增加了梯度滑动平均和偏差纠正,能让网络收敛速度快,学习效果好,适用于各种神经网络.因此,选用Adam作为优化器,并且为了防止在训练过程中模型陷入局部最优解,使用ReduceLROn-Plateau算法调整学习率,在模型训练中监视损失率在5个轮次中没有明显变化时降低学习率,使模型更好地收敛.
本文采用Adam梯度下降法,设置学习率为0.0001,批处理大小为2,总共训练150轮.训练过程中为了减少计算量以及防止过拟合现象的出现,所以采用Drop-Out操作,Drop-Out的概率值取50%,取验证集平均损失值最小的模型作为最终模型,输出概率值不小于0.5的像素识别为裂隙前景,其他作为背景.
3.2 评价指标
为评价裂隙实验中所使用方法的有效性,训练结果使用二分类混淆矩阵进行评估,识别的结果可划分为4类:真正例(TP)为含裂隙图像被识别为含裂隙图像;假正例(FP)为不含裂隙图像被识别为含裂隙图像;真反例(TN)为含裂隙图像被识别为不含裂隙图像;假反例(FN)为不含有裂隙图像被识别为含裂隙图像,如表3所示.
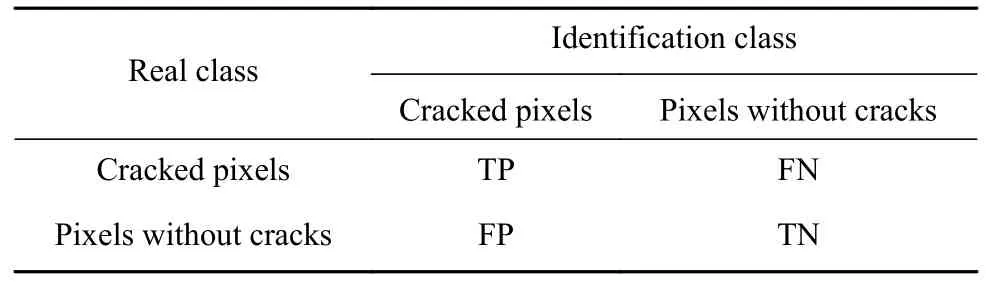
表3 实验中混淆矩阵构建方法Table 3 Confusion matrix construction method in experiment
采用准确率(Accuracy)、F1分数(F1 score)和交并比(IoU)作为评价指标.Accuracy表示识别正确的裂隙像素点和总像素点的比例.F1 score是召回率(Rc)和精确率(Pa)的调和平均,在利用F1 score对模型精度进行评估时,每个像素点的分类结果都会影响得分.IoU是对每一类预测的结果和真实值的交集与并集的比值求和平均的结果.Accuray、F1 score和IoU计算如式(10)~(14):
3.3 识别结果与分析
将U-net以及改进的5种模型进行训练,采用Accuray作为训练过程中的评价指标,BCE作为损失函数,在训练过程中的训练以及测试的指标随训练次数的变化如图7所示.从图7可以看出,在训练初期,所有模型的损失函数误差迅速降低,之后呈现缓慢降低趋势,在经过约90轮训练后,损失曲线都呈现梯度下降,并逐渐趋近于收敛.

图7 U-net及改进U-net网络模型训练过程.(a) 训练集损失函数; (b) 训练集Accuracy评价指标; (c) 测试集损失函数; (d) 测试集Accuracy评价指标Fig.7 Training process of improving U-net network model and U-net: (a) loss function of the training set; (b) Accuracy evaluation index of the training set; (c) loss function of the test set; (d) Accuracy evaluation index of the test set
上述模型在训练拟合经过后进行测试,所得的性能指标如表4所示.从表4中看出在骨干网络改进模型中随着网络层次的增加模型的评价指标也随之增加,均可以有效提升模型的分割性能,当网络层次达到101的时候,与152网络层次相比评价指标变化不大,而且网络层次增加反而使得模型的整体参数增大,识别图像所需时间增加,故而Res101-Unet模型的评价指标最好.
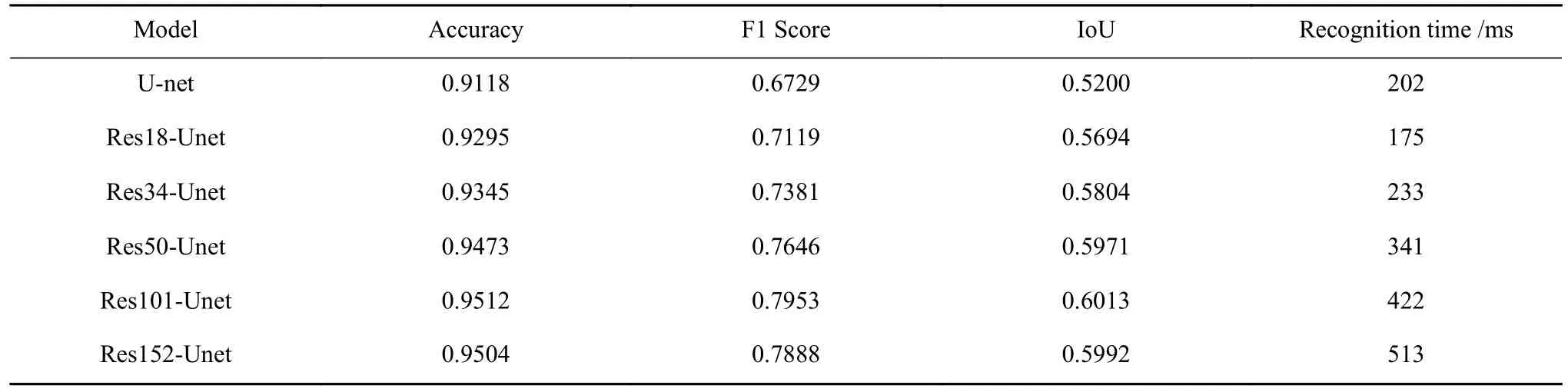
表4 多模型识别结果Table 4 Multimodel recognition results
5种模型对露天矿山边坡裂隙识别结果如图8所示.在图8中将露天矿边坡裂隙根据裂隙的数量分成简单裂隙和复杂裂隙.简单裂隙即图中只存在一条裂隙,且背景较为简单,无阴影干扰;复杂裂隙则是图像中存在较多裂隙,且裂隙相互交错形成网状,背景复杂,存在小部分阴影干扰.

图8 改进U-net网络识别结果Fig.8 Identification results of the improved U-net
对于简单裂隙,背景干扰噪声少,裂隙特征较为明显,U-net网络识别不全是因为网络层次少,下采样过程中提取的裂隙特征较少,最后进行融合输出时所收集到的特征较少,故而识别出的裂隙不完整连续,而随着ResNet对骨干网络进行改进,使得网络层次加深,所能提取到的裂隙特征更为丰富,当在网络层次达到50层时下采样过程已经能够将大部分的裂隙特征进行提取,裂隙识别已基本完整连续,之后随着网络层次加深,能够将更细微的裂隙特征进行提取,完善裂隙轮廓边缘的细节.因此对于简单的裂隙边坡识别,采用Res50-Unet模型已经能将裂隙完整识别,随着网络层次加深使得裂隙轮廓边缘细节更加完整.
对于复杂裂隙,背景中存在有噪声,噪声特征与裂隙的特征相似,因而U-net网络在下采样过程中会将与噪声相似的裂隙特征排除,且由于其网络层次较浅,能采集到的裂隙特征少,识别结果中会出现裂隙缺少,不完整连贯.采用ResNet系列网络改进U-net的骨干网络后,加深了网络层次,提取的裂隙更多,同时也能区分干扰噪声特征与裂隙的特征,从而提取更多的裂隙数量,且裂隙也较为完整,对于细微裂隙也能有较好地识别结果,当模型网络层次从101改进至152时,参数数量和训练集需求增加,可能引起对噪声、偶然性等细节的过拟合,导致裂隙完整度下降.
综上所述,当模型网络层次达到101时,此时模型评价指标最高,且对于简单裂隙和复杂裂隙都有着较好地识别效果,因此采用Res101-Unet模型作为露天矿边坡裂隙识别模型.
3.4 与传统算法识别对比
Res101-Unet模型的识别效果相对于其他三种模型识别效果更好,故从Res101-Unet的验证集图像中选出部分照片与边缘检测的Canny算子和阈值分割中的全局阈值分割、Otsu阈值分割做对比,裂隙识别结果如图9所示,采用精确率Pa和交并比IoU作为定量分析,结果如表5所示.

图9 改进U-net算法与其他裂隙识别算法对比Fig.9 Comparison between the improved U-net and other crack recognition methods
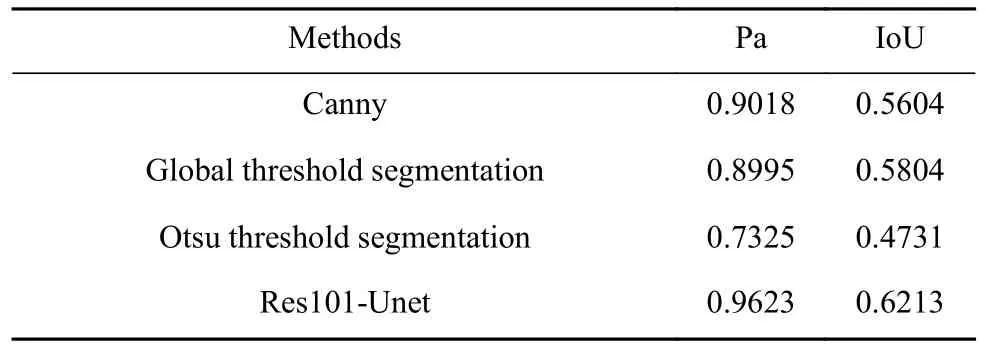
表5 与传统算法识别结果对比Table 5 Comparison of evaluation index between the improved and traditional methods
对于Group 1,图中为简单背景的单条裂隙,识别难点在于对边坡中岩体表面颗粒噪点的排除以及裂隙识别的完整性.Canny算子无法排除噪点的干扰,存在较多的噪声,Otsu阈值分割则将整个背景识别,无法排除干扰,全局阈值分割则受限于阈值的设定,虽然能较好排除大部分噪点,但裂隙形状不连续,存在部分缺失.Res101-Unet则可以较为完全地识别整条裂隙,并排除大部分的噪点干扰.
对于Group 2,图中为简单背景的多条裂隙,识别难点在于对裂隙细小边缘的提取和岩体表面凹凸不平处的干扰.Canny算子和全局阈值分割能够识别裂隙的主体,但对于细小的裂隙不能完全识别,裂隙不完整连续且存在部分噪声.Res101-Unet则除了极个别细小裂隙不能识别外,大部分裂隙都能被识别处,同时克服了岩体表面凹凸不平的噪点干扰.
对于Group 3,图中为背景复杂的多条裂隙,识别难点在于部分细小裂隙与其他裂隙的灰度值相差较大,与背景差异小.Canny算子可以识别出较为明显的裂隙,也存在噪声干扰.全局阈值分割和Otsu阈值分割则受限于设定阈值,只能识别出主要裂隙和细小裂隙的局部.Res101-Unet则能较为精准全面地识别出整体裂隙.
从表5中可以看出,与传统图像分割算法相比,Res101-Unet算法达在精确率Pa和交并比IoU分别达到96.23%和62.13%,裂隙识别的效果更为精细和完整.
3.5 裂隙几何信息解算
裂隙长度定义为裂隙中心线(骨架线)的长度.对于提取出的每条裂隙骨架,可以看成多个像素点的集合连线形成的一个闭合的多线段.针对一个闭合多线段,将截断的长度与其连接延伸的长度之和求平均,视为该闭合多线段的有效长度l[27].如图10中的图像的像素点坐标为(x,y),连接形成闭合多线段的有n条线段,形成线段两端的第k个像素点和第k+1个像素点坐标为(xk,yk)和(xk+1,yk+1),线段的距离dk如式(15):

图10 裂隙长度计算Fig.10 Calculation of crack length
则裂隙总长度Ld的计算如式(16):
对于裂隙的面积S,可以通过分割出的裂隙区域的像素点数作为其面积.
裂隙的平均宽度Da可以通过一段闭合裂隙的面积除以该裂隙的长度求得[27],如式(17)所示:
为计算裂隙的实际尺寸,可采用无人机航拍平面投影的尺寸V近似于实际尺寸.基于小孔成像原理,可通过无人机航拍飞行高度h,相片尺寸w×x,相机镜头尺寸cmos,焦距d计算出像素点对应尺寸,如式(18)所示:
本次无人机航拍飞行高度h为30 m,拍摄出的相片尺寸w×x为5472×3648,拍摄相机镜头尺寸cmos为12.8 mm,焦距d为9 mm,可得每个像素对应尺寸V为7.8 mm.
裂隙图像识别计算过程如图11所示,对边坡图像数据集中一张随机相片的裂隙进行几何信息解算,先将其输入至模型中得到其二值图,采用连通域的方法,依据像素点的特征及图像连通对二值图进行不同区域裂隙的划分,再将不同区域的裂隙代入式(16)~(18)中计算,得到裂隙的长度、宽度和面积.
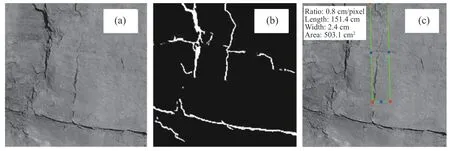
图11 裂隙几何信息解算.(a) 原图; (b) 二值图; (c) 解算图Fig.11 Calculation of geometric information of crack: (a) original drawings; (b) binary graph; (c) resulting graph
3.6 工程实例
(1) 边坡裂隙识别实例.
如图12所示为露天矿区裂隙测量目标边坡,该处边坡节理裂隙较为发育,且位于开采工作区附近,需要对其节理裂隙出露情况测量,为边坡稳定行分析提供数据基础.用训练好的Res101-Unet模型对目标边坡上的裂隙进行识别和几何参数解算,共识别出184条裂隙.
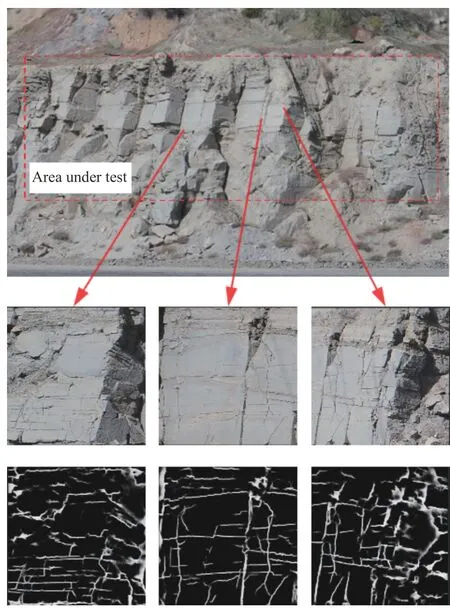
图12 露天矿山目标边坡Fig.12 Target slope of an open pit mine
图13为边坡裂隙长度和的直方统计图,采用正态分布拟合该边坡的裂隙长度和宽度的分布规律,可知裂隙长度分布范围为0~400 cm,平均长度为153.72 cm,标准差为90.71 cm,裂隙宽度分布范围约为0~6 cm,平均宽度为2.13 cm,标准差为1.26 cm.通过边坡裂隙长度和宽度的分布规律可以构建边坡三维裂隙网络,为边坡稳定性分析提供数据基础.

图13 目标边坡裂隙几何参数统计直方图.(a)长度; (b)宽度Fig.13 Statistical histogram of target slope crack geometric parameters: (a) crack length; (b) crack width
(2) 现场测量结果.
图14(a)为边坡节理现场测量图,测量区域面积与无人机拍摄面积一致,通过测线方式测量边坡出露节理,获取了边坡节理的密度、产状和组数.图14(b)和(c)分别为为岩体结构面散点图、极点等密图,图中绿色线表示边坡产状,红色线表示优势结构面产状;结构面共计182组,使用Res101-Unet模型识别的裂隙组数共计184组,两种方式所得裂隙数量高度一致,误差为1.09%,证明本模型识别结果与工程实际相符.
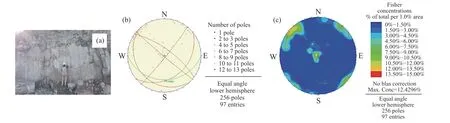
图14 现场测量结果.(a) 边坡节理现场测量图; (b) 岩体结构面散点图; (c) 岩体结构面极点等密图.Fig.14 On-site measurement results: (a) field measurement map of slope joints; (b) scatter plot of rock mass structural plane; (c) pole contour map of rock mass structural plane
4 结论
本文通过ResNet系列算法对U-net的骨干架构网络进行改进,提出了一种基于改进U-net的露天矿边坡裂隙智能检测算法,对比了5种骨干架构网络对U-net识别效果的提升,并基于图形几何学计算对本文提出的算法识别出的裂隙进行裂隙几何信息解算.
(1) 采用ResNet18、ResNet34、ResNet50、Res-Net101和ResNet152对U-net的骨干架构网络进行改进,以Accuracy、F1 score和IoU作为模型的评价指标,发现随着网络层数的加深,评价指标越高,当网络层次达到101时评价指标最高,Res101-Unet模型的Accuracy、IoU、F1 Score分别达到95.12%、60.13%、79.53%,对于简单裂隙和复杂裂隙的识别完整度都有提升.
(2) 改进模型与传统的Canny算法、全局阈值分割算法、Otsu阈值分割算法,其精确率和交并比分别达到96.23%、62.13%,对边坡裂隙的细小分支处识别更为完全.
(3) 对改进模型识别出的裂隙图像,结合图形几何学进行计算,实现了对边坡岩体裂隙的长度、平均宽度等参数的解算,能够高效获得边坡裂隙长度、宽度的统计分布规律和参数,并应用于实际露天矿边坡工程.
