机器人辅助全膝关节置换术治疗先天性双侧固定性髌骨脱位合并重度畸形1例报道
2024-04-19张壮壮程晴灏张福康杨鑫樊华郭洪章
张壮壮,程晴灏,张福康,杨鑫,樊华,郭洪章
髌骨脱位是临床上一种常见的膝关节损伤,占膝关节损伤的2%~3%,高发人群为青少年女性[1]。髌骨脱位通常分为急性髌骨脱位、复发性髌骨脱位和固定性髌骨脱位,急性髌骨脱位通常是指髌骨在急性损伤时脱出了滑车沟,大多数在膝关节伸直时可自行复位,但在初次髌骨脱位发生后,再次脱位的概率为50%[2]。固定性髌骨脱位是在整个膝关节屈伸中,髌骨与股骨远端的软骨始终没有接触,伸膝时髌骨可能接近中线,屈膝时髌骨始终位于股骨外踝的外侧,严重影响患者的日常运动及生活[3]。全膝关节置换术(total knee arthroplasty, TKA)是目前终末期骨关节炎、类风湿关节炎等最有效的治疗方式,可以矫正关节的屈曲畸形,恢复关节功能[4]。固定性髌骨脱位合并重度膝关节屈曲畸形临床上较为罕见,对此类患者进行TKA 在手术技术上极具挑战性。甘肃省人民医院骨科于2023年3月采用机器人辅助TKA 治疗先天性双侧固定性髌骨脱位合并重度畸形患者1例,术后疗效满意。本例报道经甘肃省人民医院伦理委员会审批通过(2023-512),患者签署知情同意书。
1 临床资料
1.1 一般资料
患者,男,50岁。主诉:双侧膝关节疼痛40年,加重伴活动受限20 年。现病史:40 余年前无明显诱因出现双侧膝关节反复发作间断性疼痛伴活动受限,就诊于当地医院,查体后诊断为双侧髌骨先天性脱位,因未予以重视选择保守治疗,随后症状逐渐加重,但均未进行规范诊治。20 年前症状加重且出现活动明显受限,因个人经济原因仍未进行规范诊治,自行口服镇痛药(具体不详),因症状持续加重且生活无法自理,遂于我院就诊。体格检查:双侧膝关节屈曲畸形,右侧屈曲挛缩30°,左侧屈曲挛缩45°,内侧膨大畸形,双侧股四头肌明显萎缩,双侧膝关节周围皮肤无红肿;双侧膝关节周围压痛、叩击痛明显,可触及双侧髌骨向外侧固定脱位,向内侧挤压髌骨无法复位,双下肢皮肤感觉未触及明显异常,双侧足背动脉搏动可触及,末梢血运良好;双侧膝关节伸直活动明显受限,右侧膝关节屈伸活动度30°~120°,左侧膝关节屈伸活动度45°~110°;双侧髋、踝及足指屈伸活动良好。双侧股四头肌肌力右Ⅳ级、左Ⅳ级,双侧股四头肌肌张力减弱,双侧膝反射、踝反射右(++)左(++);回旋挤压(McMurray)试验右(+)左(+),髌骨研磨试验右侧(+)左(+),膝关节外展(应力外翻)试验右(-)左(-),膝关节内收(应力内翻)试验右(-)左(-),前后抽屉试验右(-)左(-),左下肢较对侧缩短0.5 cm。诊断为难复性双侧髌骨脱位合并重度骨关节炎、双侧膝关节畸形、双侧膝关节僵硬。
1.2 术前检查
实验室检查:白细胞介素-6 8.95 pg/mL(<7 pg/mL),降钙素原0.121 ng/mL(<0.065 ng/mL),C 反应蛋白(C-reactive protein, CRP)13.90 mg/L(<10.00 mg/L),白蛋白37.76 g/L(40~55 g/L)。
影像学检查:双膝关节正侧位及双下肢全长X线片显示双侧髌骨向外侧移位,左下肢髋-膝-踝角(hip knee angle, HKA)为外翻14.1°,右下肢HKA 为外翻5.1°;膝关节侧位X 线片显示双侧膝关节间隙消失,双膝关节对合不佳,右侧股骨外侧髁与胫骨外侧平台形成假关节(图1A、1B);髋、膝、踝关节CT 及三维成像提示双侧膑骨关节对应关系异常,双侧膝关节周围成骨边缘化、髁间嵴增生、变尖;双侧下肢肌肉萎缩,左侧显著(图1C)。患者入院诊断考虑难复性双侧髌骨脱位合并重度膝关节炎、双侧膝关节畸形、双侧膝关节僵硬(图1D)。
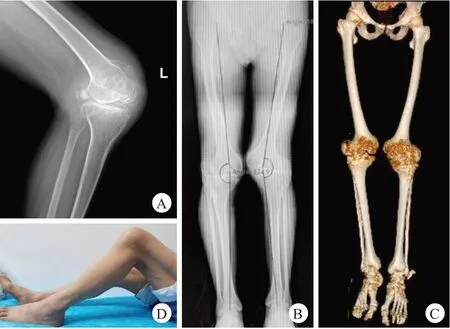
图1 患者术前资料
1.3 术前规划(机器人规划)
将患者术前下肢全长CT 图像导入鸿鹄®SkyWalkerTM机器人系统(苏州微创畅行机器人有限公司)配套的手术规划软件(苏州微创畅行机器人有限公司)中,依据CT 数据重建下肢全长三维模型。医师和工程师在3D 模型上手动确定特征点,即股骨头旋转中心点、膝关节中心点和踝关节中心点,连接股骨头旋转中心、膝关节中心和踝关节中心点,由此确定冠状面下肢力线。完成特征点选择后,在分割重建的3D 模型上进行术前假体摆位,以重建膝关节运动功能为目标,根据患者膝关节解剖形态选择合适的假体型号及恰当的内外翻、前后倾、内外旋角度。该患者采用内轴膝假体(上海微创公司),该系统根据CT 三维重建对胫骨及股骨进行切割,胫骨外侧平台磨损严重,胫骨近端截骨量参考内侧胫骨平台(外侧8.0 mm,内侧3.1 mm)。胫骨平台后倾5°(图2A);由于股骨远端畸形,外侧髁严重变形,股骨远端截骨量参照股骨内侧髁(9.0 mm,3.7 mm),屈曲90°时股骨后髁截骨量(外侧7.0 mm,10.4 mm)(图2B)。考虑患者髌骨脱位及屈曲挛缩畸形,患者伸直间隙会出现外侧紧张,术中根据实际情况,进一步通过松解外侧支持韧带及关节囊平衡内外侧间隙。

图2 鸿鹄手术机器人术前规划评估图
1.4 手术过程
患者取仰卧位,全身麻醉后在机器人辅助下完成右侧TKA。假体选择内轴膝假体(上海微创公司)。驱血带驱血后,右下肢充气止血带至350 mmHg(1 mmHg=0.133 kPa),常规取前正中切口,经髌旁内侧入路。取膝前外侧纵行切口,Z 形切开髌股支持带深筋膜、松解髂胫束,髌骨推向膝关节的内侧翻开困难,将膝关节屈曲至90°,术中见髌骨固定脱位,股骨内、外侧髁与胫骨外侧平台形成关节面,股骨外侧髁与胫骨外侧平台形成假关节,股骨远端成马蹄状畸形,关节软骨炎性破坏,关节间隙粘连严重,股骨髁间、股骨后髁骨质破坏,胫骨外侧平台缺损,膝关节外侧韧带结构挛缩严重,骨质疏松严重(图3A)。清除关节腔内及髌上囊内的增生性滑膜组织。安装股骨与胫骨的机器人定位装置,进行机器人注册配准,然后确定手术方案(图3B)。根据手术方案,主刀医师保持操作踏板处于踩下状态,机械臂运行至指定位置并将末端截骨导块调整到截骨状态。机械臂运动过程中,如果主刀医师认为运动位置错误或其他需要停止的情况,则松开操作踏板,机械臂立即停止运动,紧急情况下可按下紧急制动按钮。机械臂运动到位后,主刀医师可以采用插片等方式再次确认截骨导块是否位于合适位置,确认完毕后由医师操作摆锯进行截骨。测量屈伸间隙平衡(图3C)后安装膝关节假体(图3D)。彻底松解外侧支持韧带和外侧关节囊,将髌骨拉至膝关节正中的髌骨正常轨迹,使用带线铆钉重建内侧髌股韧带,将股直肌和股内侧肌肌腱转至髌骨外上方后行肌腱重建,使用高强度肌腱线重建髌腱,屈伸膝关节见重建后的髌骨轨迹良好,膝关节屈曲10°~90°,股内侧肌腱重建于髌骨外上极,屈伸膝关节见髌骨无脱位,髌骨轨迹回归正常。冲洗伤口,1-0可吸收鱼骨线缝合髌骨支持韧带,膝关节周围注射“鸡尾酒”,逐层缝合,无菌敷料加压包扎。1个月后另一侧膝关节行机器人辅助下TKA。

图3 机器人辅助TKA术中视图
1.5 术后处理
术后参照《中国髋、膝关节置换术加速康复——围术期管理策略专家共识》[5]予以抗感染、抗凝、止痛、消肿等治疗。术后在康复师指导下,加强股四头肌训练,促进功能康复。术后6~8周穿戴限制性支具固定辅助下下地活动,患侧肢体部分负重。患者术后1、3 个月门诊复查。术后3 个月复查时患者可独立下地走路,双侧膝关节活动度10°~110°,髌骨运动轨迹良好,无脱位或半脱位迹象(图4)。
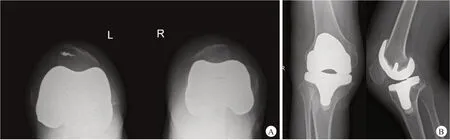
图4 术后3个月随访X线片
2 讨论
先天性髌骨脱位是生长发育异常造成的一种持续性、不可复位的髌骨脱位,与下肢畸形有关[6]。长时间的髌骨脱位造成膝关节周围持续性钝痛、膝关节不稳及肿胀,进一步加重会导致髌股关节软骨的磨损及髌股关节炎,改变膝关节的正常结构,逐渐严重影响患者的正常生活及降低患者的生活质量[7]。先天性髌骨脱位合并膝骨关节炎的发病机制复杂,患病原因及手术方案都不尽相同。目前先天性髌骨脱位主要原因分为髌股关节不稳定相关的骨性和软组织因素[8]。发育性骨性解剖异常主要包括滑车发育不良、高位髌骨、胫骨结节外偏、髌骨倾斜;软组织方面,髌骨外侧支持带挛缩与内侧支持带松弛是其中的部分因素[9]。
长年的髌骨脱位造成膝关节屈曲挛缩畸形,患者丧失了膝关节主动屈伸的功能,日常行走困难,另外由于关节疼痛,活动量减少,造成股四头肌不同程度的萎缩。膝关节的屈曲畸形及外翻是TKA 中较为难矫正的畸形,而且广泛的松解可能引起膝关节屈曲后外侧不稳定,先天性髌骨脱位会加重这种不稳定。所以该病例的治疗极具挑战性。
目前为止,有关成人先天性髌骨脱位合并膝骨关节炎治疗的研究极少,对于合并髌骨脱位及膝外翻的膝骨关节病患者,TKA 可以有效矫正畸形,恢复功能,缓解疼痛。严重膝关节畸形使得下肢机械轴和正常的生理解剖标志发生改变,干扰了正常假体的植入,容易导致下肢力线对齐不良、早期假体松动等并发症[10-11]。目前关于髌骨脱位合并严重膝骨关节炎的治疗方式有股骨远端截骨术、胫骨高位截骨术联合关节镜下内侧髌股韧带重建术改变患者力线和矫正畸形[12]。1988 年Marmor[13]首次报道了1 例63 岁双侧先天性髌骨脱位的男性患者采用了TKA,左侧是保留后十字韧带假体,右侧是后稳定性假体,髌骨未给予复位,术后进行了4年随访,膝关节屈伸活动范围左侧-7°~106°、右侧-5°~118°,膝外翻畸形得到矫正,股四头肌肌力为Ⅳ级,认为髌骨脱位合并骨关节炎可以行TKA。于建华等[14]等也报道1 例54 岁双侧先天性髌骨脱位合并膝骨关节炎的女性患者同期行双侧TKA,假体采用PFC假体,髌骨予以复位,术后随访2年,双侧膝关节稳定无疼痛,伸屈活动范围0°~120°,髌骨活动轨迹良好,无脱位或半脱位迹象,美国膝关节学会评分(Knee Society score, KSS)分别由术前左膝27分和右膝32分改善至术后左膝82分和右膝85分。因此认为TKA可以很好地矫正关节畸形并取得良好的疗效。
随着科学技术及人工智能的快速发展,术中导航技术、个性化工具定制、机器人辅助已成为当代TKA 的新选择。机器人辅助TKA 通过术前规划,根据患者术前CT 扫描,运用人工智能计算机技术进行精细策划,对骨骼精确加工,可以减少人为误差,使假体与骨之间更加贴合,能够获得更好的力线,根据患者情况制定个性化和精准化的手术方案[15]。Deckey 等[16]研究证实,MAKO 机器人以180°为重建下肢力线目标时,机器人手术组术后力线平均偏差仅为1.0°±1.7°。同时,随着国产机器人辅助系统的不断发展,鸿鹄等国产手术机器人系统已被证实可达到与进口机器人系统相似甚至更高的操作精度,获得了可靠及满意的临床疗效[17]。此外,鸿鹄手术机器人使用的截骨导块稳定地连接于机械臂末端,无须像ROSA 手术机器人那样在患者截骨部位用骨钉来固定截骨导块,从而减少了对患者骨骼的损伤[17]。与传统TKA 相比,机器人辅助TKA 无需股骨开髓,术中软组织损伤减轻、术中出血量减少,术后疼痛减轻、镇痛药物的使用减少[18]。
该病例股骨远端严重畸形合并髌骨固定性脱位,虽然股骨远端存在严重“马蹄状”畸形及髌骨脱位,截骨时参考胫骨整体力线,可以忽略畸形的影响。借助机器人的术前可视化辅助规划,进行术前模拟截骨和模拟假体放置,以避免胫骨假体穿孔。通过机器人辅助手术,精确执行术前计划,然后适当松解外侧髌股副韧带,用带线铆钉将髌骨拉至中立位,屈伸膝关节,髌骨在正常轨迹中无脱位,通过初次膝关节假体完成手术操作。术后患者力线恢复满意,短期随访膝关节功能较术前明显改善。另外,该患者由于长时间屈曲畸形,同时股四头肌严重萎缩,导致伸直功能受限,但是关节力线的恢复使关节疼痛明显改善,提高了患者的生活质量。后期康复训练使伸膝功能得到一定恢复,长期疗效需要进一步进行随访。
通过关节内截骨、软组织松解及带线铆钉固定的方法可有效完成合并髌骨脱位及严重畸形的TKA。机器人辅助可实现术前可视化规划及术前模拟操作,术中可避免解剖标志变异对截骨的影响,同时术中通过机械臂截骨可实现精确术前规划。机器人辅助TKA 为双侧固定性髌骨脱位合并重度关节畸形患者提供了一种新的安全、有效的治疗方法,但其长期疗效有待进一步研究。
【利益冲突】所有作者均声明不存在利益冲突
