基于虚拟现实的轨道交通车辆数字孪生仿真系统*
2024-03-27杨钦文赵斯杰
肖 罡 廖 琴 杨钦文 张 蔚 赵斯杰 黄 晋
(1.湖南科技大学机电工程学院, 411201, 湘潭; 2.江西科骏实业有限公司, 330100, 南昌; 3.湖南大学机械与运载工程学院,410082, 长沙; 4.清华大学车辆与运载学院, 100084, 北京; 5.中国计量科学研究院计量科学数据中心, 100029, 北京)
VR(虚拟现实)技术是轨道交通系统仿真的有效方案,已被应用于列车三维视景仿真中,主要功能是为了构成一个功能比较完善的列车运行仿真平台。国内外对此已有较为深入研究,如德国宇航中心、日本、同济大学以及北京交通大学[1-4]等单位都搭建了相关的仿真系统及平台。但上述VR在轨道交通领域的研究中,都是针对特定仿真场景和线路,缺乏多场景、多工况的自适应能力,且可视化程度与交互性效果不佳。
数字孪生的定义最早由Grieves提出,其通过在数字空间建立真实的模型,从而完成虚拟空间的映射并反映相应物理实体的全生命周期过程[5]。随着大数据技术、物联网、云计算及人工智能算法的进步,数字孪生技术在智慧城市、工业和医疗保健等领域广泛应用[6-8]。数字孪生技术能够构建具有交互性与真实性的虚拟场景,有望弥补VR技术存在的不足。
为了提高轨道交通仿真系统的可视化与交互效果,本文以城市轨道交通车辆为对象,搭建了基于VR的轨道交通车辆数字孪生仿真系统。主要工作内容如下:基于层级式三维建模实现了轨道交通车辆数字孪生仿真系统三维模型的构建,提出了考虑车厢之间车钩力的列车多质点动力学模型,实现了车辆控制力与运行速度的计算;为了描述轨道交通车辆数字孪生仿真系统三维模型的机理特征,构建了车辆电子电气模型,并提出层级式关联映射方法,实现了系统三维模型与机理模型融合(简称“机理属性附着”);通过轨道交通车辆自动驾驶控制算法完成了车辆数字孪生仿真系统的试验验证。
1 轨道交通车辆数字孪生仿真系统
轨道交通数字孪生平台是数字孪生技术和VR技术在轨道交通领域的融合应用。该平台搭建的关键环节包括数字孪生体的构建及其VR动态展示,通过该平台能够模拟列车运行的实际过程。轨道交通车辆数字孪生仿真系统如图1所示。

图1 轨道交通车辆数字孪生仿真系统
数字孪生体通过VR技术进行呈现,基于所搭建的数字孪生VR驱动引擎进行数据交互。此平台不仅可用于列车运行仿真测试,通过后续功能扩展,未来也可应用于轨道交通车辆智能运维与驾驶员培训。
2 轨道交通车辆数字孪生三维物理模型层级式建模方法
轨道交通数字孪生三维物理模型包含物理对象的外观属性、机理属性与数据属性,该模型是能与对应物理对象动态交互的数字孪生模型。三维物理模型是构成数字孪生体的主体部分,其关键技术点在于所构建的模型不仅是物理镜像,还能接受物理世界的信息,进而反向驱动物理世界,甚至成为物理世界的先知进行自主学习进化。为了提高虚实映射效果,本文对三维建模、机理建模、模型关联映射和虚拟模型控制进行了探索。轨道交通数字孪生三维物理模型如图2所示。

图2 轨道交通数字孪生三维物理模型
2.1 层级式三维建模方法
为了实现轨道交通车辆、线路、环境等模型和物理实体的一一映射,本系统基于团队已有研究基础——雷视融合三维重建方法[9],实现了轨道交通三维模型的快速自动构建。基于基础三维模型库,采用层级式建模方法,实现了轨道交通车辆系统子系统的建模。基于各子系统之间的约束关系,实现整车三维模型的构建。轨道交通车辆系统层级式建模图见图3。

图3 轨道交通车辆系统层级式建模图
2.2 层级式机理建模方法
机理模型能有效反映事物的本质特征,实现机理建模能提高三维模型的真实性。本文采用层级式三维建模思想,对整车系统机理采用层级式构建方法获得整车机理模型。此处以车辆动力学模型和电子电气模型为例进行详细阐述。
2.2.1 车辆动力学模型
针对轨道交通车辆的牵引计算模型,将每节车厢视为1个质点,提出列车多质点动力学模型。
为了简化车厢之间车钩力的计算,将每个车钩系统简化为由1个弹簧和1个阻尼器组成的结构,其受力模型可简化为:
(1)
式中:
ki——第i个车钩弹簧的弹性系数;
hi——第i个车钩的阻尼常数;


fin,i,i+1——第i节车厢和第i+1节车厢之间车钩的作用力。
根据牛顿运动学定律,多质点动力学方程表示如下:
(2)
式中:
mi——第i节车厢的质量;
vi(t)——第i节车厢的运行速度;
fin,i,i+1——各节车厢之间车钩所承载的作用力;
foi——第i节车厢运行阻力,包括基本运行阻力和附加运行阻力;
Fi——第i节车辆在运行过程中所输入的控制力,包括牵引力Fai和制动力Fbi;
t——时间。
针对轨道交通车辆的第i节车厢,应满足下列的运行约束条件:
(3)
式中:
fc——车钩所承载的作用力极限值;
ΔFi——控制力输入的变化率;
ΔFult——控制力输入变化率极限值。
2.2.2 车辆电子电气模型
PMSM(永磁同步电机)以其高效率、高功率密度、低损耗等优点被广泛应用于轨道交通牵引系统[10]。对电牵引系统进行建模形成车辆电子电气模型。电牵引系统中最复杂的单元是牵引电机,通过控制电机的输出转速及转矩可以实现牵引系统的控制。
PMSMd-q轴模型如下:
1)d-q轴坐标系下的定子电压方程:
(4)
(5)
式中:
ud、uq——d、q轴电压分量;
id、iq——d、q轴电流分量;
Rs——定子电阻;
Ld、Lq——d、q轴电感分量;
ωe——转子电角速度;
φg——永磁体磁链。
2)d-q轴坐标系下的电磁转矩方程:
(6)
式中:
np——磁极对数;
Me——电磁转矩。
3)d-q轴坐标系下的机械运动方程:
(7)
式中:
J——转动惯量;
Ml——负载转矩;
B——阻尼系数;
ωh——机械角速度。
2.2.3 层级式关联映射方法
车辆三维模型以及机理模型构建后,需要实现多源属性与车辆三维模型的关联映射才能构建完整的轨道交通车辆数字孪生三维物理模型。通过构建能够信息交互的双向接口,实现车辆三维模型与机理模型的双向信息交互映射,如图4所示。
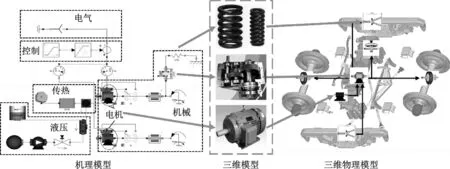
图4 车辆三维模型与机理模型关联映射示意图
多源属性包括机理属性以及动力学属性。将带有系统属性信息的机理模型与反映模型外观形态信息的三维模型分别进行层级式建模后,通过双向接口实现关联映射。在此基础上,依托三维模型之间的层级式约束,实现轨道交通系统机理的层级式映射。具体而言,可将组成轨道交通车辆系统的电气、转向架和制动等系统作为一级子系统,二级子系统通过关联构成一级子系统。以电气系统为例,其二级子系统包括牵引系统、牵引传动系统及车门控制系统等。将每级的三维模型通过机械约束进行配合,将每级的组件机理模型通过信息传递关系进行连接,最终可实现整个系统的数字孪生机理属性的关联映射,以此分层级、分散式地得到系统的数字孪生模型。该方法可更加方便、灵活、高效地实现虚拟场景动态要素的轨道交通数字孪生模型构建。
2.3 轨道交通车辆系统自动驾驶控制
对上述构建的轨道交通车辆系统的三维模型、动力学模型及电子电气模型互相关联映射后,结合轨道交通车辆自动驾驶控制算法即可实现所构建的列车三维物理模型在不同工况下的自动运行。对上述模型进行验证。
轨道交通车辆自动驾驶控制过程采用PID(比例-积分-微分)控制,控制力F(t)表示为:
(8)
式中:
Δv(t)——实际车速与期望车速之差;
KP——比例增益系数;
KI——积分增益系数;
KD——微分增益系数。
轨道交通车辆自动驾驶控制算法所得出的期望速度可由牵引系统提供,即PMSM的输出转速和转矩,通过机械传动能够成为驱动列车前进的速度和牵引力,具体的转换关系式如下:
v=3.6×2πrl/(60×γ×1 000)
(9)
Fa=Me/(rγw)
(10)
式中:
v——车速,单位km/h;
l——转速,单位r/min;
r——车轮半径,单位mm;
γ——传动比;
Fa——牵引力,单位N;
w——动力轴数量。
综合考虑控制器的实用性、性能比与经济性,选用PI(比例积分)控制器对PMSM进行控制。
3 VR仿真平台试验验证
VR仿真平台利用VR设备将上述构建的轨道交通车辆数字孪生三维物理模型实时呈现给使用者,使用者仿佛身临其境,同时通过拓展可以实现列车运行全过程的安全监测与车辆远程控制。
轨道交通车辆的数字孪生通过对轨道交通车辆、线路及周围环境进行模拟,能够根据真实路况、天气及环境变化对模型相关参数进行调整,使车辆动力学模型以及机理模型更加精确,进而提高车辆自动驾驶控制算法的精度。本文根据青岛某地铁车辆及线路等数据构建轨道交通车辆的数字孪生仿真系统,并通过轨道交通车辆自动驾驶控制算法对该仿真系统进行试验验证。
本文试验对象的车辆质量为233 t,线路限速为100 km/h。设计了A站—B站(长1 836 m)和B站—C站(长3 700 m)两个区间线路数据的试验工况。A站—B站和B站—C站区间列车运行速度曲线如图5和图6所示。由图5和图6可见:列车实际运行速度与控制运行速度误差均在±1.5 km/h内,表明在所搭建的数字孪生模型中车辆自动驾驶控制算法跟随性能较好;电机的转速与车速存在比例关系,故转速也能符合预期规划。
通过不同线路工况的仿真分析,结果表明,采用轨道交通车辆数字孪生三维物理模型能够提升车辆自动驾驶控制算法的实时性和准确性,即系统输出结果能够准确地指导该三维物理模型的运动,反映真实列车的运动规律,同时能够通过VR仿真平台,提升轨道交通车辆数字孪生仿真系统的交互性。

图5 A站—B站区间列车运行速度曲线

图6 B站—C站区间列车运行速度曲线
4 结语
1) 本文结合VR沉浸式可视化技术与数字孪生建模理论,构建了轨道交通车辆VR仿真平台。该仿真平台在三维模型的基础上实现了机理属性附着,不仅从根本上提高了仿真系统的可视化效果,还有效实现了仿真系统的交互性。
2) 本文提出的层级式机理建模以及机理关联映射方法,实现了轨道交通车辆系统多物理域机理映射,包含机理的三维模型在系统仿真中展示出了符合动力学原理的运行状态,同时完成了VR仿真平台与车辆数字孪生三维物理模型融合的有效性验证。
3) 本文以青岛某地铁车辆及线路运行数据作为仿真对象,基于本文搭建的轨道交通数字孪生仿真平台,通过车辆自动驾驶控制算法对系统仿真结果进行对比试验验证,结果表明,列车实际运行速度与控制运行速度误差均在±1.5 km/h内,证实了模型的有效性。
