最大SNR准则的共形阵列波束合成方法*
2024-03-26张华健李聪颖黄治磊周文斐
张华健,李聪颖,黄治磊,周文斐,曾 浩
(1.北京卫星信息工程研究所,北京 100095;2.海军研究院系统研究所,北京 100036;3重庆大学 微电子与通信工程学院,重庆 400044)
0 引 言
共形阵列是将天线单元共形贴附于载体表面而构成的天线阵列[1]。一般来说,共形阵列具有安装简单、节省空间、空气阻力小和波束扫描范围广等优点,在星载、机载、弹载平台上有着广泛的应用[2-3]。共形阵虽然有着突出的优势和应用潜力,但共形阵列载体弯曲引起的阵元各向异性和遮挡效应制约着波束形成,通常的平面相控阵波束合成与综合算法已不能适用于共形相控阵[4-6]。文献[7]指出,在大多数共形阵列的波束形成算法中,最常见的解决方案是通过调用欧拉旋转矩阵将天线的全局坐标转换为其局部坐标获得阵元因子再进行波束合成。文献[8]指出,在共形阵中,阵面曲率影响造成辐射单元的指向各不相同,并且各个单元的极化各不相同,导致产生严重的交叉极化分量。文献[9]研究了一种新的混合进化算法在共形相控阵方向图综合中的应用,该混合算法在共形天线阵综合的实际问题上优于遗传算法和粒子群算法。文献[10]提出了一种宽带宽扫描圆柱共形相控阵的实用实现方法。但是,以上文献在进行共形阵波束合成时,将所有的阵元都参与波束合成中,那些信噪比(Signal-to-Noise Ratio,SNR)很小的阵元,其实会导致阵列输出总的SNR降低。
为此,本文对共形阵接收信号进行建模,根据每个阵元的接收信噪比,通过迭代方法对阵元是否参与波束合成进行判断,以确保阵列输出满足最大SNR准则。
1 经典共形阵波束合成方法
1.1 理想点源共形阵模型
在共形阵列中,圆柱阵使用最广,因此本文研究以此为例,但本文方法对其他任意共形阵列同样适合。考虑如图1所示的圆柱共形阵,此时,先假设每个阵元都是理想点源,则阵列方向图仅仅由阵因子决定,与单元方向图无关。

图1 圆柱共形阵阵列结构Fig.1 Structural diagram of cylindrical conformal array
在图1中,圆柱阵列的表面上有E个等距的圆环,相邻两圆环之间间距为M。每个圆环上有D个相同阵元,以XOZ面对称,不同圆环上D个阵元布局完全相同。圆柱的半径为r。原点位于圆柱阵母线中点所在圆截面的圆心。在同一圆环上,相邻两阵元之间的夹角为α。第d行e列阵元三维坐标(pdex,pdev,pdez)可表示为
(1)
式中:d=1,2,…,D;e=1,2,…,E。
矩阵表示在阵列信号处理中更为方便,所以,阵列接收信号矩阵x(t)为
(2)
式中:s(t)为远场入射信号,入射角度为(θ0,φ0);v(θ0,φ0)为入射角度为(θ0,φ0)时的信号方向矩阵;τde是第d行e列的阵元相对于坐标原点的延时,表达式为
(3)
1.2 欧拉坐标旋转
信号在全局坐标系(X,Y,Z)下的入射角度(θ0,φ0)是已知量,为了获得每个阵元接收信号表示,定义每个阵元自身的局部坐标系(Xde,Yde,Zde)。根据阵元局部坐标系和全局坐标系关系,把信号入射角度(θ0,φ0)转换为每个单元的局部坐标系下的入射角度(θde,φde)。
对于图1的圆柱共形阵,观察第d行e列的阵元其局部坐标系与全局坐标系的关系,发现全局坐标系只需绕X轴旋转一定的角度就可得到该阵元的局部坐标系,所以欧拉旋转需要旋转的角度(αdex,αdey,αdez)分别为
(4)
通过欧拉坐标旋转方法,得到第d行e列阵元的局部坐标系下的入射角度(θde,φde)为
θde=arctan(sinθ0sinφ0sinαdex+cosθ0cosαdex)
1.3 共形阵列波束合成方法
真实的共形阵列方向图,需要考虑单元方向图的影响。在共形阵列中,阵元具有自身的本地坐标系,通过1.2节的欧拉旋转变换,由信号在全局坐标系下的入射角度(θ0,φ0)获得每个单元的局部坐标系下的入射角度信息(θde,φde)。假设天线单元在自身坐标系下的方向图为
E(θ,φ)=A(θ,φ)ejB(θ,φ)
(5)
显然,A(θ,φ)和B(θ,φ)分别是幅度和相位方向图。当信号从全局坐标系下角度(θ0,φ0)入射时,信号在第d行e列的阵元的响应为
E(θde,φde)=A(θde,φde)ejb(θde,φde)
(6)
从而,根据方向图乘积定理,得到该入射信号在全局坐标系下方向矢量为
(7)
经典共形阵列波束合成采用的权矩阵由所有天线单元对应加权值组成,权值仅仅是与方向矢量中相位部分相同,而不考虑方向矢量中幅度的不同,即
(8)
信号经过波束合成后的表达式为
(9)
式中:符号“∘”表示两个同阶矩阵的Hadamard积。此时,由于低SNR单元的信号也参与了波束合成,阵列输出SNR无法确保最优。
2 共形阵阵元选择方法
2.1 阵列输出信噪比计算
运用相控阵模型进行接收信号处理的最终目的就是提高接收信号的信噪比,对于常用的平面相控阵模型,设阵元个数为L个,波束合成后接收信号的信噪比会提高L倍。对于共形相控阵来说,由于单元增益不同,情况会有所不同。
计算噪声功率时,本文仅考虑了相控阵天线及其后端接收机的热噪声。设入射信号s(t)的功率为P0,每个阵元产生的噪声功率为Pn,则Pn的表达式为
Pn=kBTB
(10)
式中:kB为玻尔兹曼常数;T是绝对温度;B为后级接收机带宽。不同的阵元,其接收的噪声功率是完全相同的。所以阵元个数为L的共形阵,接收信号的信噪比可以表示为
(11)
式中:Al是第l个阵元的单元幅度增益,由阵元的单元方向图和入射信号相对该阵元的入射角度共同决定。
2.2 阵元启用阈值条件理论推导
为了使得共形阵列输出SNR最大,需要从所有阵元中选择SNR较大的部分阵元进行波束合成,即确定一个单元SNR阈值。当单元SNR大于阈值,就选择该阵元进行波束合成,否则放弃该阵元。寻找阈值条件的初始步骤是要将所有阵元按单元幅度增益的大小由大到小进行排序,选择单元幅度增益最大的阵元作为第一个启用阵元。
已启用N-1个阵元的信噪比RSNN-1可以写为
(12)
如果启用第N个阵元,则信噪比RSNN为
(13)
式中:A为待考察的第N个阵元的单元幅度增益。比较两者的大小,将两者做差得到
(14)
式中:α为已启用的N-1个阵元的幅度增益的均值,表达式为
(15)
对于式(14),令f(A)=(N-1)(α2-2Aα)-A2,问题转变成考察函数f(A)的符号:若f(A)>0,表明启用第N个阵元会导致接收信号信噪比下降,则不能启用该阵元进行信号处理;若f(A)<0,则可以启用该阵元。
假设天线单元幅度增益的范围为[0,Amax],所以函数f(A)的定义域为[0,Amax]。又函数f(A)在定义域内是连续的,对函数f(A)求导,得
f′(A)=-2A-2α(N-1)
(16)
由于f′(A)在定义域内恒小于0,所以函数f(A)在定义域内连续单调递减。令f(A)=0并求解得
(17)
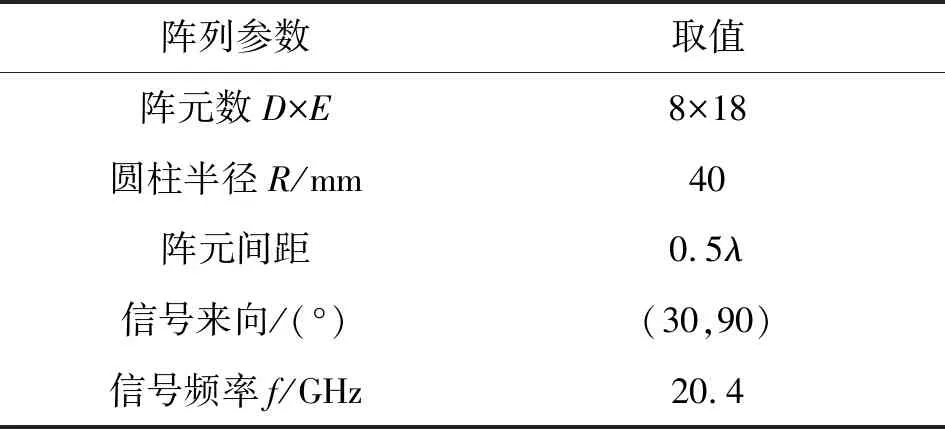
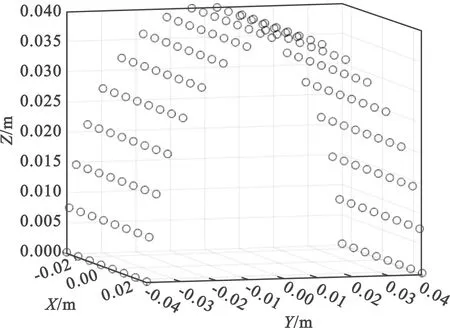
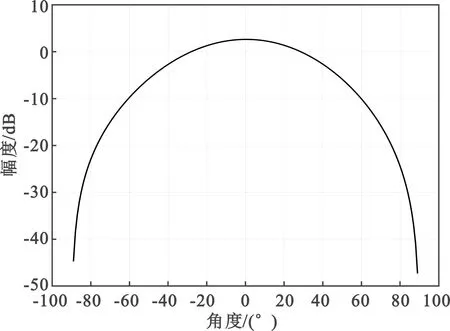
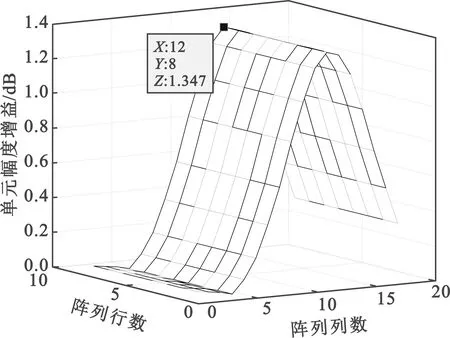
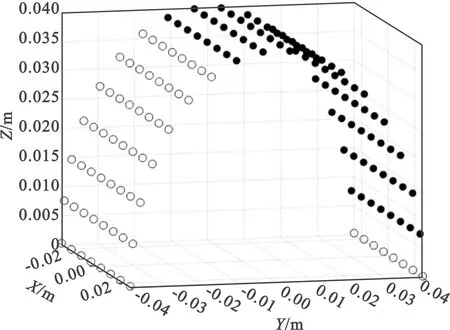
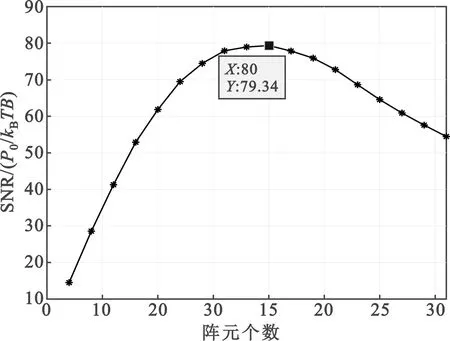
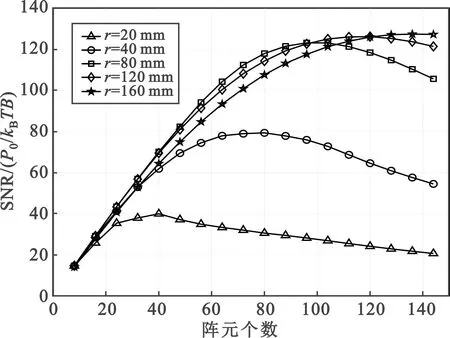
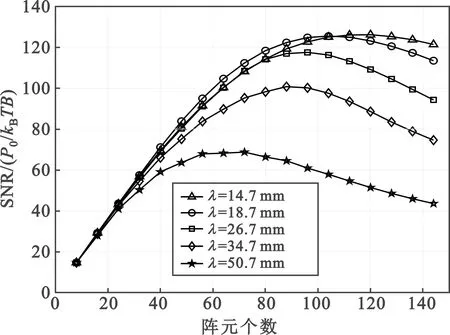
该点就是待考察的第N个阵元阈值条件。当第N个阵元的单元幅度增益A 通过2.2节可以知道,算法具体实现步骤如下: 步骤1 由欧拉转换公式把信号在全局坐标系下的入射角度转换为阵元坐标系下的入射角度,进而得到每个阵元的单元幅度增益Al;将所有阵元按单元幅度增益的大小由大到小进行排序,选取增益最大的一个阵元作为信号接收的第1个阵元,N=2。 步骤3 根据式(17)计算阈值A0。将待考察的第N个阵元的单元幅度增益A与阈值A0进行对比,若A>A0,表示此时需要启用该阵元进行波束合成,N=N+1,跳转到步骤2,考察下一个阵元;若A 步骤4 输出此时的阈值条件A0,此时Alast=A0,算法结束。 如前文所述,式(17)阵元的阈值条件Alast是用于判断阵元是否开启用于波束合成的关键参数。下面通过仿真验证阈值条件Alast计算方法的正确性。 采用圆柱阵列,仿真条件如表1所示。 表1 圆柱共形相控阵仿真参数Tab.1 Simulation parameters of cylindrical conformal phased array 此时,阵列布局的三维图如图2所示。 图2 8×18阵列布局Fig.2 Layout diagram of 8×18 array 微带圆贴片俯仰面单元方向图如图3所示,该方向图是在阵元局部坐标系下定义的。 图3 单元幅度方向图Fig.3 Unit amplitude direction diagram 根据入射信号在全局坐标系下的入射角度(30°,90°),按照欧拉旋转,可以计算每个阵元局部坐标系下信号相对阵元入射角度,代入图3单元方向图表示,可以获得每个阵元在该角度下的单元增益,如图4所示。根据图4,可以选择编号为(8,12)的阵元作为初始条件,按照2.3节介绍的阵元启用阈值条件算法步骤找到最终的阈值条件Alast,通过阵元的单元幅度增益和阈值条件Alast判断是否启用该阵元进行波束合成,作出最终的启用阵元位置示意图(图5),此时开启阵元数量为80个,计算得到的接收信号信噪比为79.34·(P0/kBTB)。从图5可以看出,由于信号入射角度为(30°,90°),开启阵元的确是入射俯仰角较小的阵元,即单元增益较大的阵元。 图4 所有阵元的单元幅度增益Fig.4 Unit amplitude gain of all array elements 图5 启用阵元示意图(实心圆启用)Fig.5 Schematic diagram of enabling array elements(solid circle enabled) 为了验证通过阈值条件判断启用阵元是否使得波束合成输出SNR最大,可以对所有阵元按照单元幅度增益由大到小的顺序逐步增加阵元进行波束合成,计算其输出信噪比得到图6。 图6 启用阵元个数与接收信号SNR关系Fig.6 Relationship between the number of enabled arrays and the SNR of the received signal 从图6可以看到,随着阵元个数的增加接收信号SNR并不随着阵元个数的增加而一直增大,而是先增大后减小。当参与波束合成的阵元个数为80个,接收信号的SNR为79.34·(P0/kBTB),达到最大值。该结果与3.2节仿真结果一致。所以,通过图5和图6的对比证明,本文提出的阵元启用阈值条件计算和阵元选择方法是正确的,可以确保共形阵列波束合成输出SNR最大。 共形阵列的曲率半径影响着天线在阵列上的位置分布,曲率半径越大,天线的分布就越类似于平面阵列,通过本文提出的方法找到不同曲率半径下最大SNR输出所需的阵元个数,作出不同曲率半径下SNR与参与波束合成的阵元个数关系图(图7),其他仿真条件不变。 图7 不同曲率半径下SNR与参与波束合成的阵元个数关系Fig.7 Relationship between SNR and the number of elements participating in beamforming under different curvature radii 由图7可以看出,曲率半径增大,输出信号SNR最大所需要的阵元个数逐渐增多。这是因为此时天线的分布逐渐类似于平面阵,各天线的单元幅度增益的差别越来越小,更多的阵元参与波束合成就会带来更大的SNR提升。因此,在曲率半径较小时,本文算法的实用性更强。 共形阵列的阵列规模与曲率半径一定时,信号波长影响着天线在阵列上的位置分布,信号波长越小,阵元间距越小,天线的分布就越类似于平面阵列。通过本文提出的方法找到不同波长下最大SNR输出所需的阵元个数,作出不同波长下SNR与参与波束合成的阵元个数关系图(图8),此时曲率半径为120 mm,其他仿真条件不变。 图8 不同波长下SNR与参与波束合成的阵元个数关系Fig.8 Relationship between SNR and the number of array elements participating in beamforming at different wavelengths 从图8可以看出,当波长较大时,输出信号SNR最大所需要的阵元个数逐渐减少。这是因为此时天线的分布更趋近于曲面阵,各个天线相对于同一入射信号的入射角度差异越大导致各天线的单元幅度增益的差别越来越大,通过本文算法选择合适的的阵元参与波束合成才能实现最大SNR输出。因此,在波长较大时,本文算法的实用性也更强。 由于共形阵阵面是弯曲的,入射信号相对每个阵元的入射角度不一致,各个阵元具有不同的接收信噪比。本文通过设计一种启用阵元阈值条件算法,根据阈值条件对不同角度的入射信号合理选择共形阵部分阵元进行波束合成,从而确保输出信号SNR最大。Matlab仿真实验验证了算法的正确性,对于共形阵信号接收处理具有参考价值。2.3 阵元启用算法步骤

3 仿真分析
3.1 仿真条件
3.2 阵元选择方法仿真
3.3 输出SNR验证
3.4 曲率半径对输出SNR的影响
3.5 信号波长对输出SNR的影响
4 结 论