基于遥感影像水下目标尾迹探测综述 *
2024-03-18师俞晨
师俞晨
(核工业北京地质研究院 遥感信息与图像分析技术国家级重点实验室,北京 100029)
0 引言
随着全球化的不断发展,海洋不仅为人们生产生活带来资源和便利,更是军事战略版图的重要一部分[1]。水下目标探测识别技术也逐步成为研究热点,尤其是针对潜艇舰船的识别。当前国内外学者已应用声学、电磁等技术进行水下目标探测,并获得了大量的研究成果。但随着现代化技术的创新,AIP(air independent propulsion)动力技术、减震降噪技术、水声对抗等技术的应用,军事目标的“隐身”性能提高,传统方法难以进行识别探测,因此水下非声探测技术已成为重点发展方向[2]。
水下目标在运动过程中不止会产生噪音,还会因螺旋桨的旋转空化、水动力等原因产生尾迹[3]。尾迹中主要含有低密度微气泡,持续时间长、范围大、不容易消除、不容易伪装[4]。目前,在尾迹探测方法系统中,基于遥感技术的探测方法能够实现大面积、全天时、全天候连续监测,并能根据数据分析水下目标的航速、位置和深度等参数。随着遥感技术的不断发展,无人机、侦察机、卫星等高空探测设备可以搭载各类传感器(如雷达、热红外、光学等),传输不同类型的高分辨率影像,有效支撑尾迹监测系统的探测分析,保障尾迹探测的实时性和真实性。
本文从水下非声探测技术出发,在国内外非声探测技术水平的基础上,重点研究遥感光学、热红外、合成孔径雷达(synthetic aperture radar,SAR)影像的水下识别探测技术,并分析算法优缺点,对今后的研究方向进行展望。
1 尾迹特征
尾迹从产生到消失的过程分为4 个阶段,即近区尾流、坍塌段、过渡段和远区尾流[5],并且形成2种特征,即水动力特征和热特征。
1.1 水动力学尾迹
水动力学尾迹主要是水下目标航行运动时引起水面粗糙度的变化,主要的尾迹类型有开尔文尾迹、伯努利水丘、旋涡尾迹和内波尾迹。
1.1.1 开尔文尾迹
开尔文尾迹是潜艇在水下运动时,在远场水面上产生的窄V 字形尾迹(如图1)。由横断波和分歧波组成,分歧波向潜艇两侧扩散,而横断波主要向潜艇后方传播,在尾迹角范围为16°~19.5°,相遇形成尖头波,又因为尖头波波长过短,在视觉效果上就连成了一条直线,称为开尔文臂,开尔文臂以船身对称,且角度小于39.6°[6-7]。

图1 开尔文尾迹示意图Fig. 1 Kelvin wake image
开尔文尾迹产生的自由表面波高[8]为
式中:A为描述潜艇特性的自由谱;θ为与x轴所夹的波传播方;k为重力加速度与潜艇速度平方的比重。
1.1.2 伯努利水丘
伯努利水丘是潜艇在水下运动时,产生的近场表面波,引起潜艇上方水面隆起的现象,其波高取决于潜艇的速度与下潜深度[9](如图2)。该现象可由伯努利方程表示,如下:

图2 伯努利水丘示意图Fig. 2 Bernoulli image
式中:p为流体中某点的压强;v为该点流体的流速;ρ为流体密度;g 为重力加速度;h为该点所在高度;C是一个常量。
伯努利水丘的实质是流体的机械能守恒。理想流体在管道中作稳定流动时,流体在作任意两截面处的总比能,即单位质量的流体的总能量由比能与比动能所组成,三者之和为一个恒量[10]。简单来说,在流体中,速度大,压强就小;速度小,压强就高。通过流体中的压强差,造成了水面隆起。
1.1.3 旋涡尾迹
旋涡尾迹是由于螺旋桨及船体的作用,伴随着流动特性和物理特性与周围海水明显不同的旋涡尾流区(如图3)。与固定受力面不同,旋涡尾迹由于旋转而受到额外的非惯性力作用,如科氏力和离心力等,涡系演化中非线性现象更丰富,流动特征也更加复杂[11]。尾流生成后的初始阶段主要表现为射流特征,随着射流速度的衰减,尾流逐渐转化以自由湍流扩散为主要特征。
图3 旋涡尾迹示意图Fig. 3 Turbulent wake image
1.1.4 内波尾迹
潜艇在运动过程中产生的内波形式和规律更加复杂,内波尾迹是在分层的海洋中,航体的扰动和航行留下的尾流破坏了原有的密度跃层,在海洋中产生了一种周期震荡[12-13]。
内波尾迹模型可以写为
式中:r为距离潜艇尾部的距离。
按照生成的机理不同,内波可以分为3 类:物体体积效应产生的内波,称为Lee 波;湍流尾流引起的随机波动,称为随机波;尾流塌陷产生的内波,称为塌陷内波[14]。
1.2 热尾迹
水下目标在运动行进过程中产生的热尾流根据原理可分为2 种:一是由航行器的推进器、螺旋桨对海水产生扰动,破坏原有海水密度分层、温度分层,使能量传递至海面产生一定的流场变化;二是航行器在活动过程中,机器发热量大,大量的冷却水被排放,水体受密度差影响,经过浮升扩散,形成热尾流[15]。尤其是核潜艇,其尺寸和所需的推进功率较大,根据熵增定律,汽轮机动力装置会把超过75%的废热以冷却水的形式排放,形成的热尾流可以延绵几百米至1 km,长时间内不易消除[16-18]。
随着红外成像技术仪的快速发展,红外探测系统的最低温度分辨率可以达到0.001 ℃。通过前人的研究模拟发现大型的水下目标在深水潜航时,其反应堆热排水温度高且持久;小型的水下目标虽然发热量小、尾迹弱,但水下排气口的温度通常超过100 ℃[19]。由此可见,通过机载或星载红外探测系统可以有效地识别水下目标热尾迹(如图4)。热尾流在探测器处的红外光谱辐射亮度主要是来自海面的红外光谱辐射亮度Lsea(λ)、大气路径光谱辐射亮度Lp(λ)组成,其表达式为[20]
图4 热尾迹示意图Fig. 4 Thermal wake image
式中:ε(λ)为热尾流光谱发射率;ρ(λ)为反射率;Lbb(λ,Tw)为热尾流温度Tw的黑体光谱辐射;Lsky(λ)为天空光谱辐射;Lsun(λ)为太阳光谱辐射。
2 基于光学影像尾迹识别技术
由于无人机系统的发展,提供了更高分辨率的光学影像,甚至可以直接观测到水下1 m 的目标,为尾迹识别技术提供了基础保障。目前,主要通过研究分析尾流气泡中的散射和吸收等效应,以判断尾迹。
最初,有国外学者使用蓝绿激光作为尾流光学探测光源,利用尾流气泡对蓝绿激光的吸收或反射,在海面上产生亮斑或黑洞影像,从而观察到水下目标的存在。比如,俄罗斯的“紫石英”机载蓝绿激光潜艇探测系统、美国“ML-90 魔灯”蓝绿激光探潜系统、瑞典和加拿大的“鹰眼”机载激光探潜系统等[21]。
随着影像分辨率的不断提高,当前基于光学的尾迹识别技术也有了较大的发展,主要可以分为基于高光谱尾迹识别技术和偏振成像尾迹识别技术。高光谱影像包含了丰富的地物光谱信息,对比于传统的地物检测和目标检测手段,提供了更多不可或缺的信息。利用高光谱影像进行目标检测是研究学者近年来研究的热点之一。由于高光谱波段数较多,光谱间隔小,之间的关联性高,因此前期的预处理工作十分重要。尾迹中含有的大量气泡是光学尾迹识别的关键,气泡在不同波段所表现的光学特性不一样。因此需要拆分高光谱波段,进行降维处理,找出最优波段集合后,根据气泡的光谱信息,通过算法提取尾迹。寻丽娜等人在高光谱影像上利用独立分量分析,抑制背景海浪杂波,有效识别目标[22];成媛媛等人根据尾迹特征,将高光谱降维,结合光谱分析技术识别目标[23]。该类方法数据量大,易冗余,光谱信息受环境因素影响严重,自适应性较差,适用于精细化处理。
国内也有一些学者利用偏振成像技术提取、仿真潜艇尾迹。吴恒泽等人将水面波纹看作是诸多不同倾角的平面微元集合,通过微面元偏振度、偏振角计算微面元法向量,从而重建曲面,为提取运动潜艇的水面波纹三维面型提供了理论支持[24]。
基于光学影像尾迹识别技术处于发展阶段。高分辨率影像中尾迹细节清晰可见,光谱信息丰富。但是目前的方法并未充分利用,一些特性隐含在数据中,可挖掘其活动规律,递进演化出水下目标的状态。
3 基于SAR 影像尾迹识别技术
SAR 是一种主动微波遥感设备,它通过虚拟阵列及脉冲压缩等技术获取高分辨率地物二维图像[25]。由于微波具有后向散射能力,对水面曲率和水面粗糙度十分敏感,所以利用SAR 提取海洋特征和波纹的研究层出不穷,是当前尾迹识别的主要手段之一。挪威国防研究中心与欧洲航天局共同搭建了“船舶及其尾流极化SAR 检测”科研平台、加拿大Satlantic 公司开发了RADARSAT 海洋检视工作站、法国的CLS 和BOOST 公司开发了SAR tool 系统,通过遥感手段进行水下目标尾迹检测与识别[26]。
水下航行体在SAR 影像中一般形成高亮区域,尾迹具有单臂或者双臂的线性特征[27-29]。但是由于海洋风场、洋流、相干斑等因素影响,导致影像存在噪声,进而对目标检测与目标解译有强烈的干扰。因此,采用线性特征检测方法可以有效识别SAR 影像中的尾迹,主要的算法有Radon 变换算法、Hough变换算法和恒虚警率检测算法(constant false alarm rate detector,CFAR)。
Radon 变换算法是一个积分变换,它是定义在二维平面上的一个函数沿着平面上任意一条直线做线性积分,变换后成为一个亮或暗的峰值。因此,在变换区域中的亮斑或者暗斑对应原始图像中的一条亮线或者暗线,即为尾迹。但是Radon 变换难以区分带有曲线的尾迹和尾迹的起点、终点,并且海面风场、波浪等造成的噪声容易产生虚警,难以精准识别。针对算法的固有缺陷,一些学者进行了改进。文献[30]基于Radon 变换和低秩稀疏分解模型利用极化信息减少影像干扰,突出尾迹特征,提升目标识别率;文献[31]利用结合梯度的归一化Radon 变换增强了变换域中的峰谷值,采用成对搜索算法提取峰谷值,得到真实的尾迹,并确定了尾迹的起点和方向;文献[32]将尾迹特征提取视为Radon 变换的逆问题,采用稀疏化的广义最小最大凹(generalized minimax concave,GMC)提升尾迹识别率。
Hough 变换是一种特征提取技术,主要用于检测二值图像中的直线和曲线。该算法运用2 个坐标之间的变换,将图像空间中的线条映射到参数空间形成点,从而把形状问题转化为统计问题[33]。但是SAR 影像受环境因素影响较大,难以自适应阈值,导致算法鲁棒性差[34]。因此,文献[35]对Hough 变换进行了改进,通过切割窗口图像,将目标以窗口灰度均值代替,有效识别SAR 影像尾迹;文献[36]基于递归修正Hough 变化域检测尾迹,该方法能够有效地区分具有图像特征差异的多直线尾迹。
恒虚警率检测算法是当前SAR 尾迹检测的主流算法,该算法是恒定虚警概率下的检测器,主要判断在含有噪声的情况下,尾迹信号是否存在。舰船目标相对于海杂波而言有较强的散射回波,能够产生较好的检测结果。后续在其基础上,衍生出了多种尾迹检测算法。文献[37]提出了一种自适应参数变换恒虚警率算法,该方法基于自适应变换,通过恒虚警率算法筛选虚假候选目标像素,利用归一化Hough 变换检测二值图像尾迹;文献[38]通过海杂波建模,减少影像杂波后,利用恒虚警率算法识别尾迹。
虽然基于SAR 影像的尾迹识别算法卓有成效,但是现如今基于SAR 提取潜艇尾迹的方法受风速影响严重,并且在入射角、方位角差别大的情况下,同一目标在SAR 影像中呈现的特点会迥然不同,难以做到精准识别。
4 基于热红外影像尾迹识别技术
由于成像原理以及探测设备的特性,红外影像噪声不可避免,具有背景杂波不确定性强、脉冲噪声较多等特点[39]。尤其是风力较大的天气,水体翻腾,散热过快,影像信噪比低,尾迹信号被背景和噪声淹没,难以捕捉。并且实体实验成本较高,有一定的敏感性,因此国内外学者以缩比模拟实验为主。
当前主要的模拟方法有动网格法和来流法,如表1 所示[40-46]。动网格法可以用来模拟流场形状由于边界运动而随时间改变的问题,实现水下目标的真实运动过程的模拟,主要包括重叠网格技术和移动网格技术等。来流法实现了水下航行器与背景水体的相对运动。来流法增加了热尾流与环境水体之间的能量交换速度,使得降温过快,导致热尾流浮升至水面时最大温差过小且最大温差出现时间明显增长[47]。
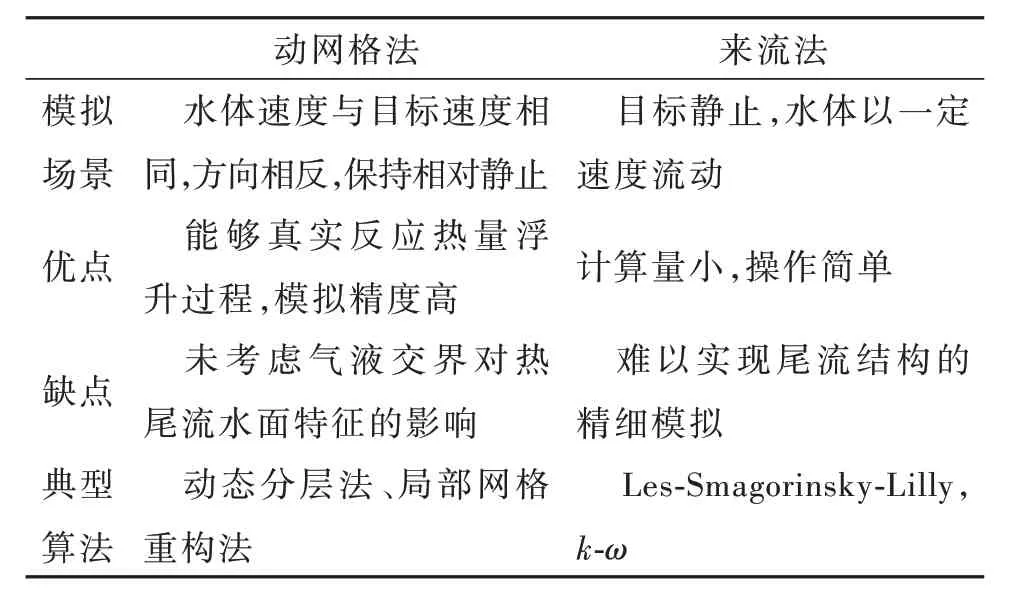
表1 热红外尾迹模拟算法对比Table 1 Comparison of thermal wake simulation algorithms
通过模型仿真、数值模拟,学者们对热尾流的变化过程有了进一步的分析。热尾流的浮升扩散受水下目标运动的速度影响较小,与速度的1/4 次方成正比[42]。但是与水体、推进器有着密不可分的联系。当水体为均匀无分层的流体时,热尾流可以无限制地浮升扩散,并且推进器转速越高,水面变化区域越大,导致热尾流浮升高度随航行器移动方向呈阶梯状分布;当水体为垂直温度梯度的流体时,分层会抑制热尾流的浮升,而气泡则有促进作用,使得尾迹的变化过程存在一定的波动,红外特征明显。最初,冷却水浮升至尾流中线附近,在红外影像中以热斑的形式出现,形成狭窄的缝隙,后由于浮力的影响以及横波的传播,水波带着暖流向四周扩散,并且夹带率小于均匀流体[48-49]。当水下航行器在温度跃层上方时,热尾流具有明显的浮力射流特性,会形成“冷尾迹”结构;当水下航行器在温度跃层下方时,运动产生的内波影响原有的结构,产生红外信号,且热信号强度与航速、相对跃层的位置密切相关,呈现出大尺度相干涡的结构特性,温度差通常在0.001 K 数量级[50]。
基于热红外影像尾迹识别技术目前研究算法较多。但是在现实海域中拍摄海面红外图像的成本高昂,工作量大并且难以在不同的工作条件下获得图像。
5 总结与展望
本文根据遥感影像类别,分析了光学影像、SAR影像、热红外影像尾迹识别技术的特点和算法。目前基于SAR 影像、热红外影像尾迹识别技术较成熟,无论是模拟仿真还是缩比实验都可以达到很好的效果。基于光学的水下目标尾迹识别技术目前还在发展阶段,主要是由于光学影像容易受云层、海浪以及气候干扰,难以建立背景模型。
随着遥感技术的不断发展和进步,水下目标尾迹探测技术的发展趋势如下:
(1) 充分利用高光谱影像,将光谱信息与尾迹特征相结合,发展多维度尾迹识别系统,有望显著提升水下目标检测能力。
(2) 在环境气候恶劣的情况下,SAR 影像中尾迹与杂波难以区分,尤其是小目标。有针对性地进行影像预处理,背景与目标的分离也是未来的研究方向。
(3) 由于尾迹在不同影像中有不同特征,仅凭借单一手段难以精准捕捉水下目标踪迹,未来的探测方法将会结合水动力学、热红外特征、SAR 特征和光学特征综合识别。
(4) 尾迹的形态通常与目标的状态有关,通过尾迹的扩散程度、臂长、温度等,反演出水下目标前进方向、速度、水深等参数,也是未来重要的发展方向。
(5) 紧密结合深度学习等人工智能技术,通过少量数据驱动水下目标尾迹检测工作,不仅减少人为客观因素的影响,同时也充分利用尾迹图形图像信息,进一步增强水下目标尾迹检测能力。