基于FABEMD和Goldstein滤波器的SAR舰船尾迹图像增强方法
2012-10-03张问一胡东辉丁赤飚
张问一 胡东辉 丁赤飚
①(中国科学院空间信息处理与应用系统技术重点实验室 北京 100190)
②(中国科学院电子学研究所 北京 100190)
③(中国科学院研究生院 北京 100039)
1 引言
1978年,随着合成孔径雷达(Synthetic Aperture Radar,SAR)卫星Seasat的发射,SAR已经证明其在观测各种海洋现象和舰船目标中的巨大应用价值。在SAR海洋图像中,除可以观察到海浪、中/大尺度涡、锋面和油迹等海洋特征以外,还可观察到运动舰船和由其产生的尾迹特征。利用 SAR舰船尾迹图像进行舰船监测对维护领海主权和专属经济开发区经济利益具有重要的军事和民用价值[1]。相比直接对 SAR图像中的舰船进行检测,由于舰船尾迹具有覆盖面积广,持续时间长等特点,在舰船目标的检测、识别和参数提取中具有更加广泛的应用价值和前景。SAR舰船尾迹图像中常见的开尔文尾迹常被用于舰船位置和航速的反演[2-5],而另一种更加常见的湍流尾迹常用于舰船参数和航向的反演[2,3]。然而,舰船尾迹作为一种特殊的海面特征成像机理更为复杂,且 SAR对舰船尾迹的观测条件,舰船参数和周围海况参数等均会对 SAR图像中的舰船尾迹带来影响,导致观察到的开尔文尾迹在 SAR图像上特征纹理常不明显,可视化效果不佳,影响检测和识别概率,以及参数提取精度。
目前,已经有许多学者开展 SAR舰船尾迹图像的增强研究,增强方法主要集中在抑制斑点噪声和增强舰船尾迹相对背景对比度两大类。对于第 1类,邹焕新等人利用小波变换对 SAR舰船尾迹图像中的斑点噪声进行抑制并增强航迹线性特征[6];Krishnaveni等人利用小波阈值萎缩(Wavelet Threshold Shrinkage)方法进行噪声抑制,而与邹焕新的方法在小波变换后阈值选取上采用不同策略[7];Chen等人在处理由潜艇产生的SAR舰船尾迹图像时使利用合理设计的距离滤波器实现V字型尾迹臂的增强,并利用维纳滤波处理模糊和包含噪声SAR舰船尾迹图像[8],但增强效果比较不明显,且未介绍具体实现方法;Moya等人利用均值移动滤波(Mean Shift Filtering)降低SAR海洋舰船尾迹图像中相干斑噪声,并保持舰船尾迹[9]。对于第 2类,Tunaley等人提出可对海洋自然特征纹理进行抑制,便于进行舰船尾迹检测[4];Arnold等人利用频域高通滤波器提高尾迹特征的信噪比[5];Jin等人对SAR舰船尾迹图像相邻尺度的小波系数取模并逐点相乘,得到更细和更明显的尾迹边缘[10],虽然可以有效抑制噪声,但破坏除尾迹边缘以外有用的尾迹特征,并对原图中舰船尾迹的信噪比有较高要求;Ai等人对同时包含舰船和尾迹的SAR海洋图像,按舰船目标几何中心将图像进行分块,增强舰船尾迹相对海浪纹理之间的信杂比,但对不包含舰船或者在沿方位向运动产生偏移的SAR舰船尾迹图像,该方法的应用受到局限[11]。
实际上,在SAR舰船尾迹图像的频率域(波数域)中,开尔文尾迹和湍流尾迹具有与海洋背景和噪声显著不同的特征。因此,本文在通过 FABEMD(Fast and Adaptive Bidimensional Empirical Mode Decomposition)提高尾迹相对背景的图像和频谱对比度基础上,在波数域中首次引入干涉相位滤波中使用的 Goldstein滤波器方法,对开尔文尾迹进行直接增强处理。该增强方法不仅提高了舰船尾迹相对背景对比度,还对开尔文尾迹实现了直接增强。本文的结构如下:首先,通过分析开尔文尾迹和湍流尾迹的模型和频谱特性,研究 SAR舰船尾迹图像及其频谱特征,并分析 Goldstein滤波器在舰船尾迹增强中的适用性;其次,研究利用 FABEMD对 SAR舰船尾迹图像进行分解,提高开尔文尾迹和湍流尾迹相对背景对比度;然后,针对 SAR舰船尾迹图像增强的需要,改进 Goldstein滤波器并发展整个增强流程;最后,基于包含不同舰船尾迹特征的TerraSAR-X图像,进行开尔文尾迹增强实验,并采用不变矩评价增强效果。通过主观与客观指标的评价,验证了本文方法具有增强效果显著,计算简便和适用性较高的特点。
2 增强原理分析
2.1 SAR舰船尾迹图像及其谱特性
2.1.1 舰船尾迹模型及频谱特性
(1) 开尔文尾迹模型
完整的开尔文尾迹有横波、扩散波和由横波与扩散波干涉形成幅度最强的尖头波组成[3]。可根据水动力学模型,仿真开尔文舰船尾迹波高分布。假定观测点(x,y)离船足够远(1-2倍船长之后),水面无限深,并且是窄船体。当船体以速度U沿−x方向运动(x>0)时产生的开尔文尾迹波高分布函数ζ(x,y)为[12]

其中符号Re[⋅]表示取括号内变量的实部;A(θ)是复幅度,称为自由波谱或Kochin函数,仅由船体的几何构型决定;Ω(θ)是一个相位函数,如式(2)所示:

其中k(θ)是以θ角传播尾迹的波数成分,满足:

其中k0=g/ U2=k (0)是沿 θ=0 rad 传播的横波波数,g为重力加速度常数。通过求解式(1)的积分,可以得到开尔文尾迹波高分布。
(2) 开尔文尾迹频谱特性
根据开尔文尾迹波高表达式(1),可令f(x,y)为

假设 f(x,y)对于所有 x和 y均成立[13],并对f(x,y)的实部进行2维傅里叶变换得到ζ(u,v)如式(5)所示[14]:
其中f*表示函数f的复共轭。根据2维傅里叶变换可求得 FFT[f(x,y)]如式(6)所示:

其中kx=k(θ)c os θ为x方向的波数(rad/m),ky=k(θ)s inθ为y方向的波数(rad/m)。选取船长200 m,船宽20 m,船速10 m/s,吃水深度17.5 m,场景大小为512×512像素,分辨率为3 m,x方向为方位向。得到由舰船尾部产生的开尔文尾迹波高ζ(x,y)如图1(a)所示。并求得其功率谱如图1(b)所示,其中的标注表示开尔文尾迹在 kx<0的波数范围内分布至 kx0=2 π×(2 57−233)/3×513=−0.098 rad/m。根据式(8)直接得到的功率谱示意图如图1(c)所示,图中的标注表示开尔文尾迹在 kx<0的波数范围内分布至kx′0=g/U2−0.098 rad/m。由图 1可知,直接计算得到的功率谱示意图和仿真得到的开尔文尾迹功率谱形状和起始波数相同。因此,开尔文尾迹功率谱在波数域为两条对称的线性特征,并可用式(8)进行描述。
(3) 湍流尾迹模型及其谱特性
相比开尔文尾迹,湍流尾迹的形成机理尚不明确[15]。但湍流尾迹在 SAR舰船尾迹图像中的却十分明显,表现为暗条带的尾迹特征,张角很小。可根据湍流尾迹的宽度随尾迹与舰船距离x的变化进行原理仿真。湍流尾迹的宽度通过半经验公式(9)得到[3]:

其中ρ为直线到原点的距离,当直线具有一定宽度时,ρ在一定范围内取值;θ为直线与x轴的夹角。可令ρ为

则式(10)可表示为

利用傅里叶变换的位移特性和旋转特性,可以得到直线 hl(x,y)的傅里叶变换 Hl(u,v)为

式(13)表示直线代表的湍流尾迹 hl(x,y),其傅里叶变换 Hl(u,v)能量集中在过零频且与原直线垂直的直线上。选取与仿真开尔文尾迹时相同的参数,湍流尾迹起始点距离船头800 m,湍流尾迹区域灰度值设为0,其他区域灰度值设为1。仿真得到的湍流尾迹和其宽度随距离x的变化如图2(a)和图2(b)所示。并得到图2(a)功率谱如图2 (c)所示,其频谱特性与式(13)描述的频谱特性一致。
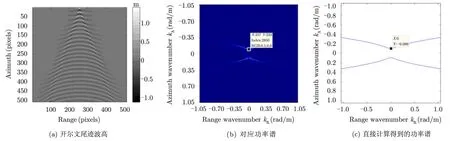
图1 仿真开尔文尾迹波高分布及其功率谱

图2 仿真湍流尾迹分布及其功率谱
2.1.2 SAR舰船尾迹图像及其谱特性 理想情况下,海表面的雷达后向散射截面与海表面波高成正比;实际情况中,由于 SAR对运动海面复杂的成像机理,SAR海洋图像谱和海浪谱之间不是简单线性变换关系[16]。SAR观测到包含海浪和舰船尾迹的图像,其图像谱 SI(k)与海浪和舰船尾迹波高形成的波浪谱 Ψs+w(k)可以采用非线性变换关系的 1阶近似进行描述:

其中k,SI(k),HD(k)和T(k)分别为波数矢量、包含海浪和舰船尾迹 SAR图像谱、方位向波数截断因子和SAR调制传递函数。 Ψs+w(k)在不考虑海浪和舰船尾迹相互作用的条件下[15],可认为单纯海浪的海浪谱 Ψs(k)和舰船尾迹的海浪谱 Ψw(k)满足线性叠加的关系,即:

在波数域中,Ψs(k)以对称的双峰形式存在(如JONSWAP 谱[17]),Ψw(k)以线性特征形式存在(如2.1.1节的分析所示),均为窄带成分。虽然经过HD(k)和T(k)的调制,仍然不改变其窄带特性。Sn(k)为图像噪声(主要为斑点噪声),在波数域中为宽带成分[16]。
2.2 Goldstein滤波器原理及增强适用性
InSAR干涉图常存在噪声[18]。Goldstein等人提出与场景无关的Goldstein干涉图滤波器,可有效增强干涉条纹并抑制噪声[19],其简要步骤为:首先将干涉图分块为,并进行2维傅里叶变换至频率域得到局部功率谱S(u,v);然后对其进行平滑,并构造平滑滤波器如下:

其中α∈ [0,1]为局部增强因子;最后将S(u,v)与Z(u,v)相乘,并进行2维逆傅里叶变换,得到滤波后的干涉图像块。Goldstein滤波器的适用条件基于干涉图噪声在频域为宽带信号,而干涉条纹为窄带信号。根据2.1节的分析,SAR舰船尾迹图像谱中窄带的开尔文尾迹满足 Goldstein滤波器的适用条件,但也与干涉图的频谱具有明显的不同,因而需要对Goldstein滤波器进行改进。
2.3 SAR舰船尾迹图像FABEMD分解
在 SAR舰船尾迹图像中,待增强的开尔文尾迹相对湍流尾迹较不明显。而在图像谱中,待增强的开尔文尾迹表现为较高频率对称的线性特征。与零频处的谱峰值以及过零频的湍流尾迹相比,能量很小,不能直接使用传统的 Goldstein滤波器。因此需要对 SAR舰船尾迹图像及图像谱中的开尔文尾迹和湍流尾迹进行分解,提高开尔文尾迹和湍流尾迹相对背景的图像和频谱对比度,并分别进行Goldstein滤波增强和保持处理。
FABEMD是最近提出的一种基于数据驱动的图像分解方法[20]。经过FABEMD可以得到一系列频率从高到低、尺度从细到粗的2维内蕴模式函数(Bidimensional Intrinsic Mode Function,BIMF),以及频率最低、尺度最粗的余项(Residue)。将所有BIMFs和余项线性叠加可以恢复原始图像,并且将某几个相邻层 BIMFs线性叠加可以得到具有一定尺度和频率分布的图像。相比于传统的 BEMD方法,FABEMD可以更加快速和准确地对任何尺寸和分辨率的图像进行分解。令原始图像为I,S1=I,第i层BIMF为iF,并且余项为R。FABEMD实现的简要步骤如下:
(1) 令i=1并且Si=I;
(2) 使用3×3的矩形窗获取待分解图像的局部极值;
(3) 通过计算每一层局部极值图中极值点相互之间的欧氏距离,确定统计MAX/ MIN滤波器的窗口大小 weni×weni;
(4) 使用统计 MAX/ MIN滤波器构造极大值和极小值包络;
(5) 令每一层的平滑窗大小 wsmi=weni,并对局部极值图进行平滑滤波。滤波之后得到极大值包络UEi和极小值包络LEi;
(7) 通过Fi=Si−MEi计算得到Fi,并令i=i+1,Si=Fi−1;
(8) 判断分解层数 NBEMD是否达到,或者Si中是否含有少于3个极值点。如果满足以上任意一个条件,则停止分解过程。否则,继续执行步骤(2)至步骤(7),获得下一个BIMF。
2.4 基于FABEMD和改进Goldstein滤波器的增强方法
SAR舰船尾迹增强的目的在于增强模糊的开尔文尾迹,并对湍流尾迹进行保持。如果不对两种尾迹进行有效地分解,则本来已经较为明显的湍流尾迹也将得到增强,且零频处的能量也将影响Goldstein滤波器的使用。相比常用的Gabor函数分解和小波分解方法,由于FABEMD不依赖于基的选取,可以更有效地分解 SAR舰船尾迹图像中的开尔文尾迹和湍流尾迹。并且针对 SAR舰船尾迹图像的分解,FABEMD具有两项特点:(1) 通过自适应或强制选取每一层统计滤波器窗口大小weni,控制获取每一层BIMF图像的特征尺度,以实现对开尔文尾迹BIMFs的有效分解;(2) 通过对高斯白噪声的分解表明BEMD和FABEMD具有波数域2维滤波器组特性,可用于改进Goldstein滤波器的实现,避免对低频和零频处的频谱特征进行增强。因此将FABEMD引入Goldstein滤波器对SAR舰船尾迹的增强过程中,得到如图3所示的实现流程。
由于待增强的开尔文尾迹的分布范围较广,且随与舰船扰动点之间的距离,开尔文尾迹能量逐渐减少,波高逐渐降低,在 SAR图像中的信噪比也随之降低。对于实际包含大范围开尔文尾迹的SAR图像进行增强时,可对待增强图像进行分块处理,并通过选取合适的增强系数,实现信噪比随距离变化的开尔文尾迹的增强。由于FABEMD分解方法,使用3×3的矩形窗获取待分解图像的局部极值,较好地解决了图像的边界效应问题[20],因此可以直接对待增强的舰船尾迹图像进行分块处理,而不需对各图像块进行重叠。待增强的开尔文尾迹的波长λw和舰船运动速度U之间的关系如下[23]:
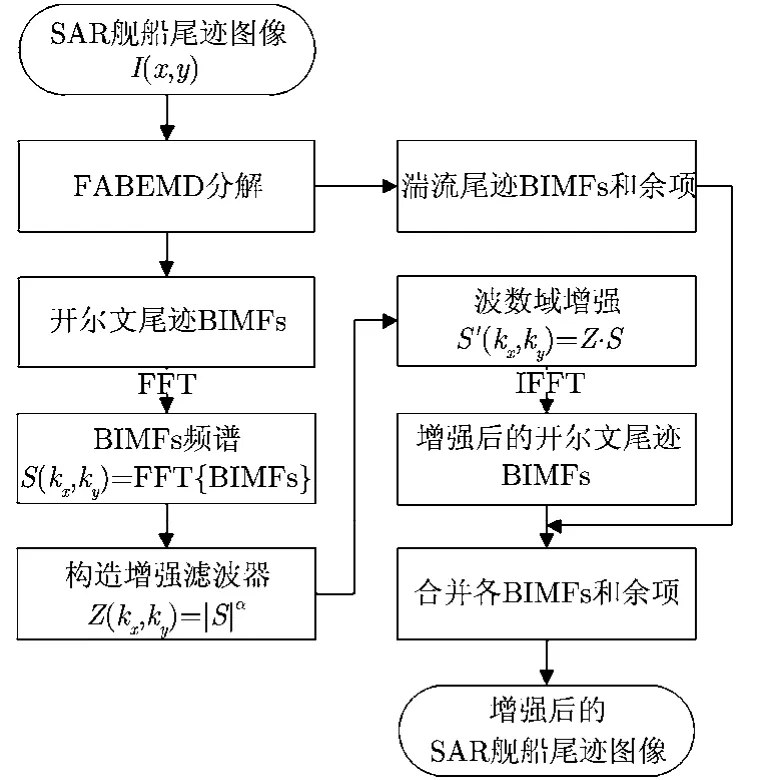
图3 基于FABEMD和Goldstein滤波器的增强方法

其中φw为尾迹传播方向和舰船航行方向之间的夹角,g为重力加速度常数。目前航行最快的舰船航行速度不超过20 m/s,当 φw=0 rad 时求得该速度下最大的开尔文尾迹波长约为256 m。为保证选取的图像块空间域中有足够周期的开尔文尾迹纹理,在波数域中有线性窄带成分,图像块尺寸至少选取为开尔文尾迹纹理最大空间尺度的两倍。此外,图像块尺寸的选取应尽量便于实现快速傅里叶变换。
3 SAR舰船尾迹图像增强实验及分析
3.1 实验数据及分析
为验证本文方法的效果,选取TerraSAR-X一景图像中3幅包含不同特征的典型开尔文尾迹和1幅 SEASAT图像进行 SAR舰船尾迹增强实验。TerraSAR-X卫星3幅实测图像分别为:(1) 包含1个开尔文臂和湍流尾迹的SAR图像;(2) 包含模糊开尔文臂和显著湍流尾迹的SAR图像;(3) 包含两个开尔文臂和模糊湍流尾迹的SAR图像。SEASAT卫星实测图像为:包含模糊开尔文尾迹横波和显著湍流尾迹的 SAR图像。TerraSAR-X图像获取于2007年 7月 9日 06: 29 UTC,景中心经纬度为(− 5.36°,35.57°),方位向和距离向分辨率(投影至地距)均为3 m。SEASAT图像方位向和距离向分辨率(投影至地距)均为25 m。待增强图像的大小(方位向×距离向)包括 256×256像素和 512×512像素两种。分别对待增强的TerraSAR-X卫星图5(a),图7(a)和图8(a)进行小波分解,分解过程使用Matlab小波工具箱 dw2dtool,经过多次试验选取 4阶Symlets小波,Haar小波和4阶Daubechies小波进行两层小波分解,结果如图4所示。从分解结果中可以看出,包含湍流尾迹的小波系数图中还含有开尔文尾迹特征,开尔文尾迹和湍流尾迹未能明显地分解开。
3.2 实验结果及主观评价
包含1个开尔文臂和湍流尾迹的SAR图像增强前后的对比如图5所示。本文提出的方法具有明显的增强效果,图5(b)开尔文尾迹中的横波、扩散波和尖头波相比原图更加清晰;图5(d)波数域中开尔文尾迹相比湍流尾迹成分和斑点噪声对比度显著增强。
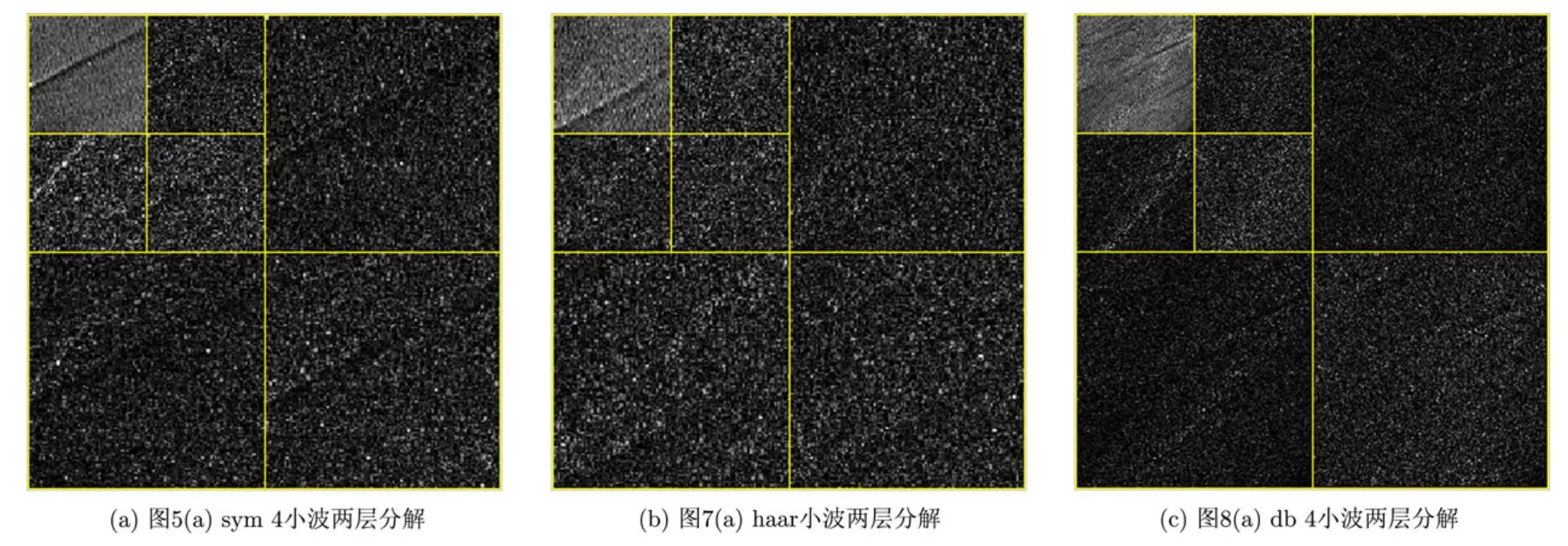
图4 待增强SAR舰船尾迹图像小波分解结果
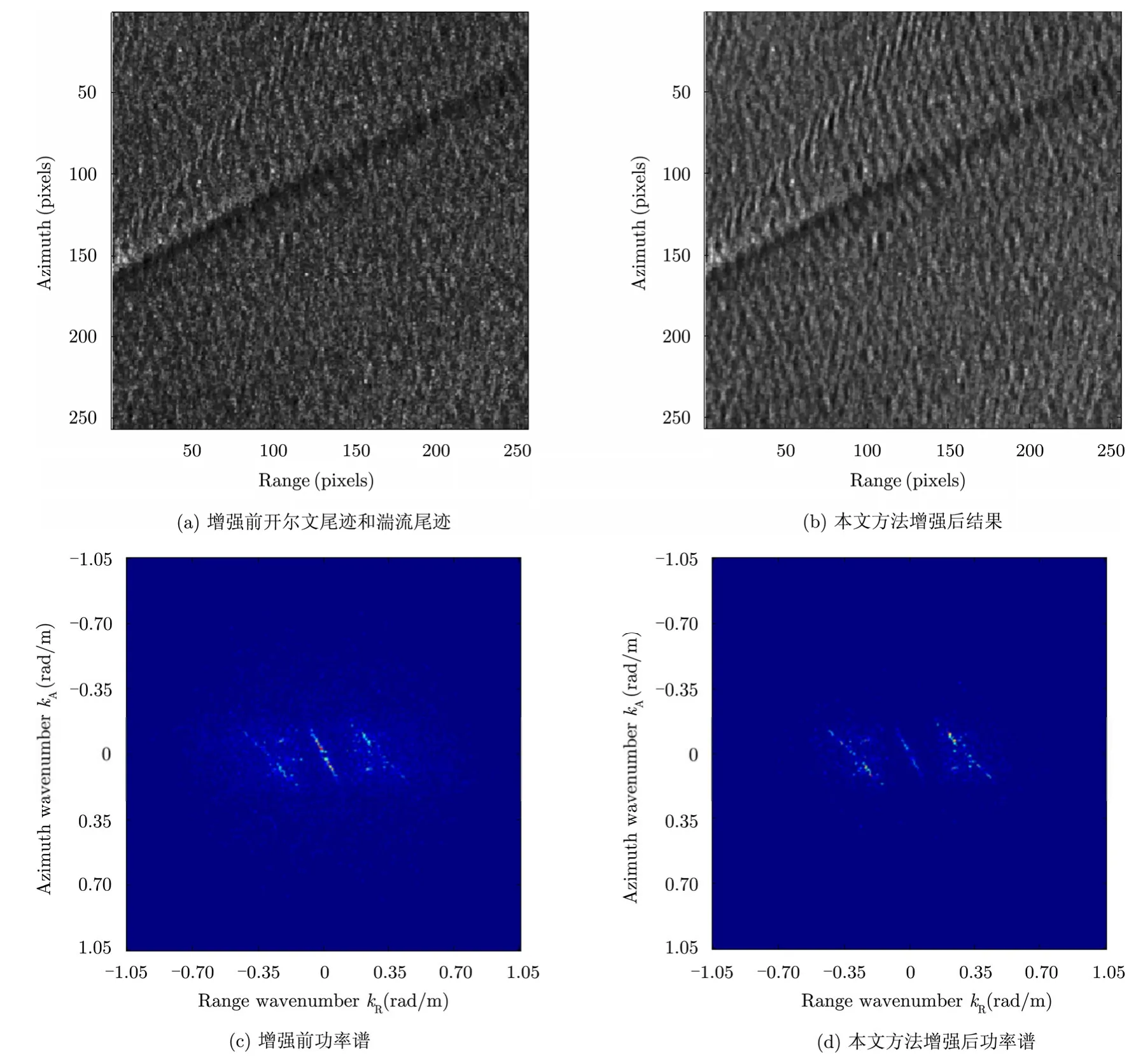
图5 包含开尔文臂和湍流尾迹的SAR图像增强前后比较
进一步本文提出的方法对图 5(a)进行FABEMD分解及改进 Goldstein滤波器增强的过程,得到如图6所示的结果。分解层数为3,weni= 3,5,开尔文尾迹所在 BIMFs如图 6(a)所示,对应的功率谱中只具有开尔文尾迹对称的线性特征(如图6(d)所示),相比原图及其功率谱(如图 5(a)和图 5(c)所示)开尔文尾迹的图像和频谱对比度均得到了提高。利用改进的 Goldstein滤波器对分解得到的开尔文尾迹 BIMFs进行直接增强(α=0.6),得到增强后的开尔文尾迹BIMFs和对应的功率谱如图6(b)和图6(e)所示。开尔文尾迹的特征均得到了显著的增强,横波和尖头波增强明显。湍流尾迹 BIMFs和余项如图6(c)和图6(f)所示,从其对应的功率谱可以看出,FABEMD将开尔文尾迹和湍流尾迹成功地进行了分解,分解之后的湍流尾迹的图像和频谱对比度也得到了提高。并且开尔文尾迹左侧暗臂也变得清晰可见。
利用本文提出的方法,包含模糊开尔文臂和显著湍流尾迹的SAR图像增强前后对比如图7所示。分解层数为3,weni=3,5,α=0.5,模糊的开尔文尾迹右臂得到了较为明显的增强。包含两个开尔文臂和模糊湍流尾迹的 SAR图像增强前后对比如图 8所示。分解层数为 4,weni=3,5,7,α=0.55,开尔文尾迹的左暗臂和右亮臂均得到了明显的增强,并且横波和扩散波也得到了一定程度的增强。包含模糊开尔文尾迹横波和湍流尾迹的SEASAT SAR图像增强前后对比如图9所示,分解层数为4,weni=3,5,7,α=0.7,开尔文尾迹的横波得到了明显的增强,并且开尔文尾迹右暗臂也得到了一定程度的增强。
3.3 客观指标评价
目前针对 SAR舰船尾迹图像中开尔文尾迹的直接增强研究较少,在客观评价本文方法的增强效果时,除可采用常规的如图像均值Mean和图像方差Var进行评价以外,还需采用更有效的评价指标。由于开尔文尾迹的理论功率谱模型清楚,因此可利用增强前后开尔文尾迹 BIMFs功率谱与参考开尔文尾迹功率谱的相似性评估增强效果。本文选取图1(a)中开尔文尾迹右臂的功率谱作为参考。但真实的开尔文尾迹功率谱与参考开尔文尾迹功率谱必然具有不同。因此引入具有良好尺度、平移、旋转和视角不变性的不变矩[21],并利用增强前后开尔文尾迹 BIMFs功率谱和参考开尔文尾迹功率谱的相对不变矩距离c(i,r)(使用文献[22]中的描述)来评价舰船尾迹的增强效果。相比原图,增强后的 c(i,r)越小,代表增强后的开尔文尾迹 BIMFs功率谱和参考开尔文尾迹功率谱越相似,增强效果越好。可以得到TerraSAR-X 3幅图像如表1所示的评价结果(各图评价指标最优值以粗体标示)。由表1中的指标可以得出:基于FABEMD和改进Goldstein滤波器的增强方法,显著提高了SAR舰船尾迹图像中尾迹特征的清晰度,且增强了开尔文尾迹特征。
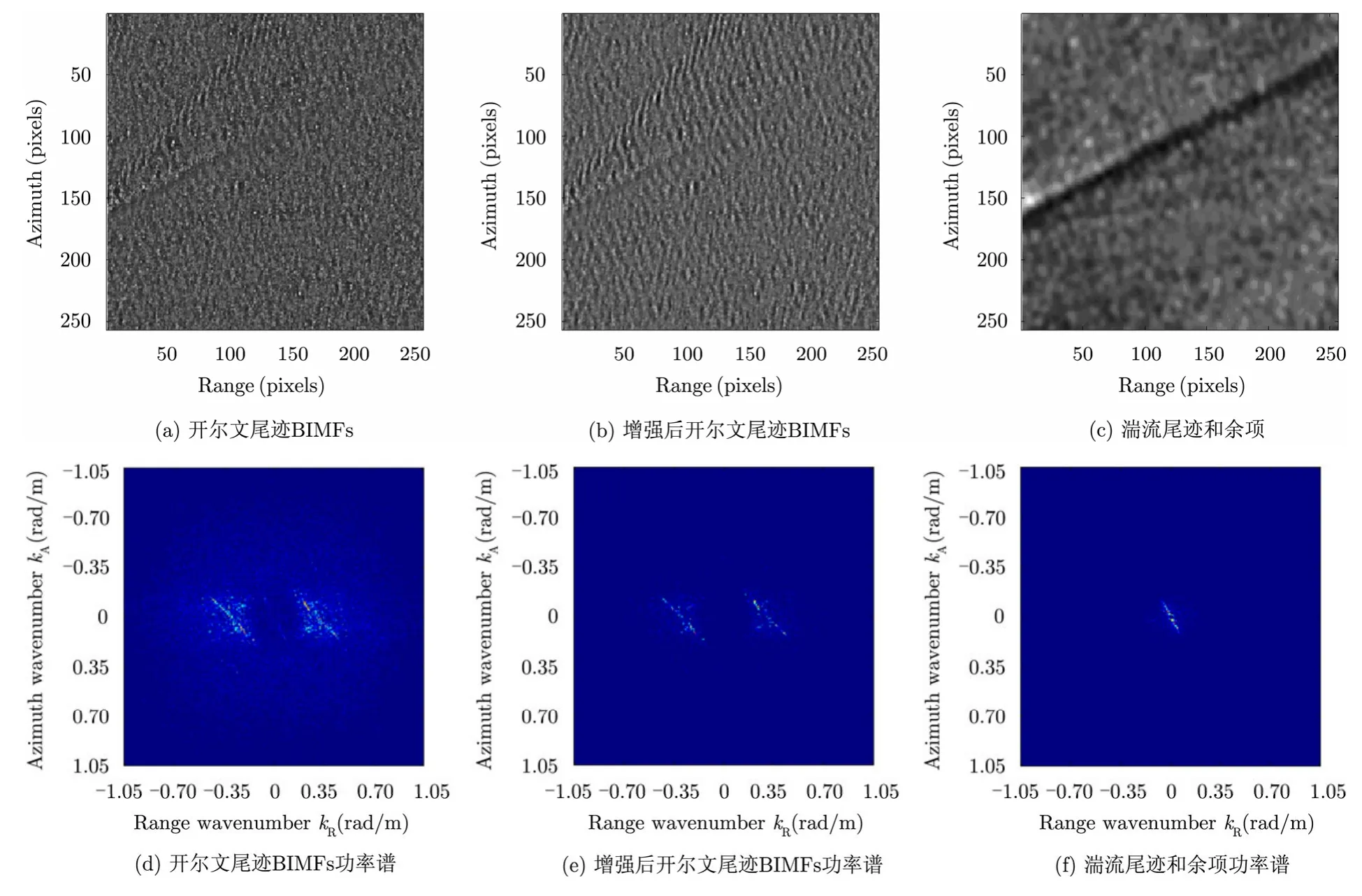
图6 基于FABEMD和改进的Goldstein滤波器增强过程
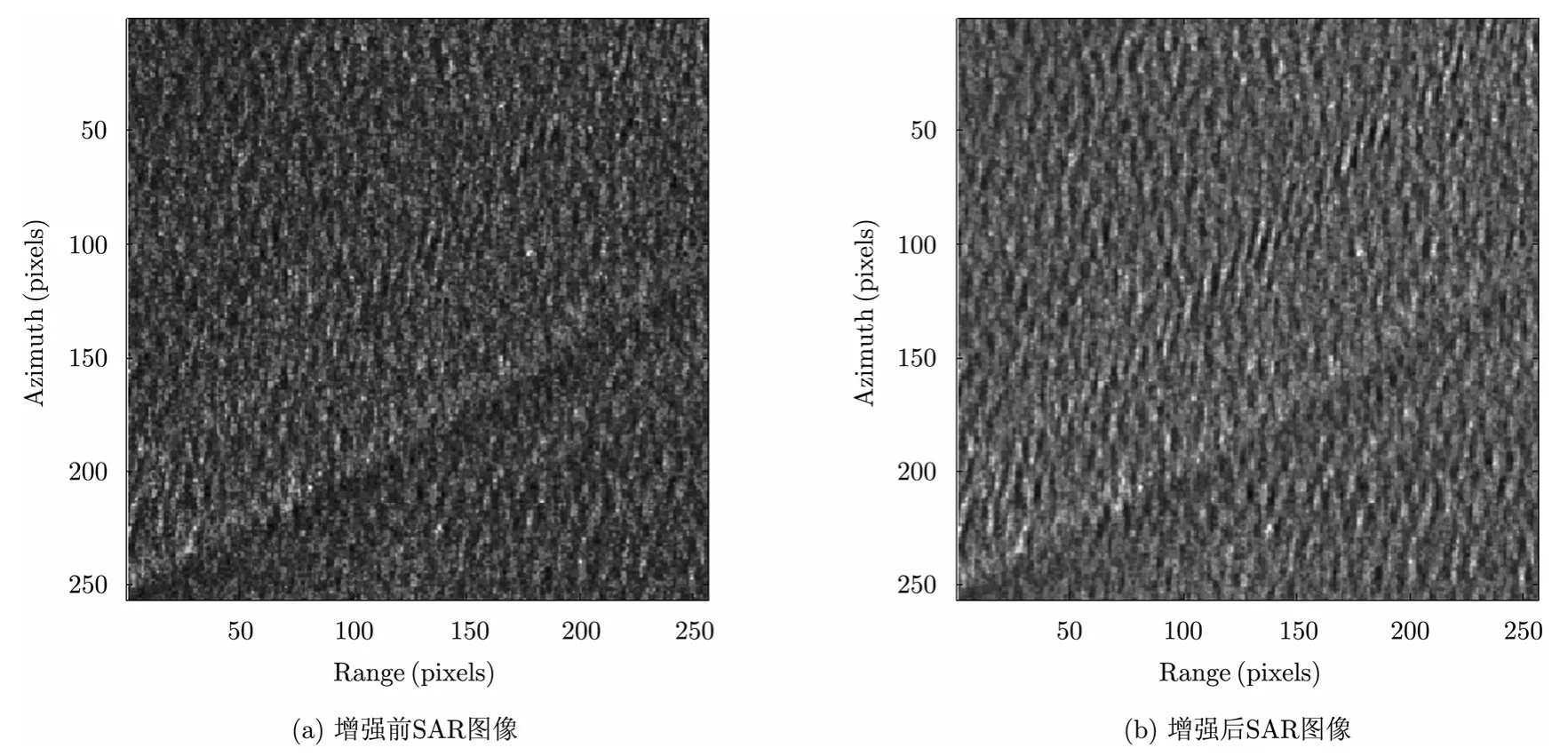
图7 包含模糊开尔文臂和显著湍流尾迹的SAR图像增强前后比较
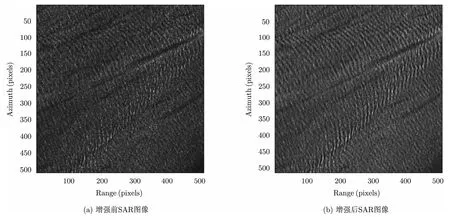
图8 包含两个开尔文臂和模糊湍流尾迹的SAR图像增强前后比较
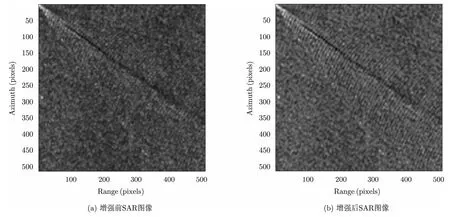
图9 SEASAT包含模糊开尔文尾迹横波和湍流尾迹的SAR图像增强前后比较

表1 TerraSAR-X卫星SAR图像增强效果评价
4 结束语
本文通过分析SAR舰船尾迹及其图像谱特征,提出一种基于FABEMD和改进Goldstein滤波器的 SAR舰船尾迹图像增强新方法。在视觉上对模糊的开尔文尾迹具有显著的增强效果,保持了湍流尾迹和其他特征,且实现简单;基于主观和客观指标评价也表明该方法的适用性和有效性。本文方法将为基于 SAR舰船尾迹的舰船检测、识别和参数提取提供帮助。下一步研究针对 SAR舰船尾迹自适应FABEMD分解的方法和步骤开展研究,并且可在增强过程中自适应地确定增强参数。
[1]Vincent K and Fabrice C.SAR-derived coastal and marine applications from research to operational products[J].IEEE Journal of Oceanic Engineering,2005,30(3): 472-486.
[2]Wu Z.On the estimation of a moving ship's velocity and hull geometry information from its wave spectra[D].[Ph.D.dissertation],The University of Michigan,1991: 14-100.
[3]Zilman G,Zapolski A,and Marom M.The speed and beam of a ship from its wake's SAR images[J].IEEE Transactions on Geoscience and Remote Sensing,2004,42(10): 2335-2343.
[4]Tunaley J K E.The estimation of ship velocity from SAR imagery[C].2003 IEEE International Geoscience and Remote Sensing Symposium,Toulouse,France,July 21-25,2003,Vol.1: 191-193.
[5]Arnold B A,Martin A,and Khenchaf A.Obtaining a ship’s speed and direction from its kelvin wake spectrum using stochastic matched filtering[C].2007 IEEE International Geoscience and Remote Sensing Symposium,Barcelona,Spain,July 23-28,2007: 1106-1109.
[6]邹焕新,蒋咏梅,匡纲要,等.一种基于斑点抑制的 SAR 图像舰船航迹检测算法[J].电子与信息学报,2003,25(8):1051-1058.Zou H X,Jiang Y M,Kuang G Y,et al..Detection algorithm of ship wakes of SAR image based on the speckle noise suppression[J].Journal of Electronics & Information Technology,2003,25(8): 1051-1058.
[7]Krishnaveni M,Thakur S K,and Subashini P.An optimal method for wake detection in SAR images using Radon transformation combined with wavelet filters[J].International Journal of Computer Science and Information Security,2009,6(1): 66-69.
[8]Chen Y Q,Feng J,and Zhu M H.Detection methods of submerged mobile using SAR images[C].2005 IEEE International Geoscience and Remote Sensing Symposium,Seoul,Korea,2005: 1717-1720.
[9]Mata M D,Jarabo A P,Jimenez C B,et al..Application of mean-shift filtering to ship wakes detection in SAR images[C].Proceedings of 20108th European Conference on Synthetic Aperture Radar (EUSAR),Aachen,Germany,2010: 893-896.
[10]Jin M K and Chen K S.The application of wavelets correlator for ship wake detection in SAR images[J].IEEE Transactions on Geoscience and Remote Sensing,2003,41(6):1506-1511.
[11]Ai J Q,Qi X Y,Yu W D,et al..A novel ship wake CFAR detection algorithm based on SCR enhancement and normalized Hough transform[J].IEEE Geoscience and Remote Sensing Letters,2011: 8(4): 681-685.
[12]Tuck E O,Lazauskas L,and Scullen D C.Sea wave pattern evaluation,part I report,primary code and test results(surface vessels)[R].Applied Mathematics Department,The University of Adelaide,Tech.Rep.,Apr.1999: 1-9.
[13]Tuck E O,Collins S I,and Wells W H.On ship wave patterns and their spectra[J].Journal of Ship Research,1971,15(1):11-21.
[14]梁奉龙,陈永强.一种 SAR 图像 Kelvin 尾迹反演舰船速度的方法[J].科学技术与工程,2011,11(20): 4793-4799.Liang F L and Chen Y Q.A ship velocity inversion method of ship kelvin wakes in SAR images[J].Science Technology and Engineering,2011,11(20): 4793-4799.
[15]Arnold B A,Khenchaf A,and Martin A.Bistatic radar imaging of the marine environment—part II simulation and results analysis[J].IEEE Transactions on Geoscience and Remote Sensing,2007,45(11): 3384-3396.
[16]Jackson C R,Apel J R,et al..Synthetic Aperture Radar Marine User’s Manual [R].Washington DC,2004: 139-169.
[17]Zhang M,Zhao Y W,Chen H,et al..SAR Imaging simulation for composite model of ship on dynamic ocean scene[J].Progress in Electromagnetics Research,2011,113: 395-412.
[18]于晓歆,杨红磊,彭军还.一种改进的Goldstein InSAR干涉图滤波算法[J].武汉大学学报(信息科学版),2011,36(9):1051-1054.Yu X X,Yang H L,and Peng J H.A modified goldstein algorithm for InSAR interferogram filtering[J].Geomatics and Information Science of Wuhan University,2011,36(9):1051-1054.
[19]Goldstein R M and Werner C L.Radar interferogramfiltering for geophysical applications[J].Geophysical Research Letters,1998,25(21): 4035-4038.
[20]Bhuiyan S M A,Adhami R R,and Khan J F.Fast and adaptive bidimensional empirical mode decomposition using order-statistics filter based envelope estimation[J].EURASIP Journal on Advances in Signal Processing,2008,2008: 1-18.
[21]Hu M K.Visual pattern recognition by moment[J].IRE Transactions on Information Theory,1962,8(2): 179-187.
[22]王珂,洪峻,张元,等.浅海水下地形检测算法[J].红外与毫米波,2012,31(1): 85-90.Wang K,Hong J,Zhang Y,et al..Algorithm for detection of shallow water bottom topography[J].Journal Infrared Millimeter Waves,2012,31(1): 85-90.
[23]Hennings I,Romeiser R,Alpers W,et al..Radar imaging of Kelvin arms of ship wakes[J].International Journal of Remote Sensing,1999,20(13): 2519-2543.