无人机折叠翼分步展开机构设计及动力学分析 *
2024-03-18许冶许国胜王钰坤王刚刘景旺范伯钧吴淼
许冶 ,许国胜,王钰坤,王刚,刘景旺,范伯钧 ,吴淼
(1. 武汉天拓宇航智能装备有限公司,湖北 武汉 430207;2. 北华航天工业学院 河北省跨气水介质飞行器重点实验室,河北 廊坊 065099;3. 北华航天工业学院 河北省微小型航天器技术国防重点学科实验室,河北 廊坊 065099;4. 北京电子工程总体研究所,北京 100854)
0 引言
小型巡飞无人机的微型化、智能化、系统化、高速长航时化将是未来的发展趋势。对于无人机存在的问题及技术弱点,如驱动器的选用及分布、折叠翼展开方案、折叠翼展开稳定性及展开过程的力学性能等,都是国内外研究的焦点[1-2]。
文献[3-4]建立了折翼飞机气动弹性飞行仿真平台,研究了折叠速度和飞机重心位置对结果的影响。文献[5]等利用ADINA 软件研究了集装箱发射导弹机翼机构的静、动、强度特性。文献[6]提出了一种Z 字型气动布局的折叠方案。文献[7]设计了一种连杆式折叠翼折叠机构方案。文献[8]建立了考虑第二展开机构约束的二次折叠翼气动优化设计方法。文献[9]研究了无人机在极限风速下的失稳及失能特性。文献[10]设计了一种弹性锁紧机构以减小机翼展开到位瞬间的冲击力。文献[11]提出了一种仿生折叠翼的设计方案。文献[12]建立了以展开时间和角速度为评价指标的弹簧折叠翼展开过程的理论模型。文献[13]提出了拉杆式、火箭式和拉绳式3 种多折叠翼结构技术方案。文献[14]设计了一种轴/轴套式的折叠传动机构,作为折叠翼机构的传动装置。文献[15]研究了特种无人机折叠翼展开过程。文献[16]设计了一种兼顾高低速工况的变形翼骨架。文献[17]设计了一种可变翼面积的机翼,能够在变形后提高机翼的面积和展弦比。现今国内外关于折叠翼的研究内容大多侧重气动布局优化设计及展开过程的力学性能分析,涉及折叠翼展开方案对无人机飞行过程中力学性能影响的研究较少,并且设计的折叠翼大多机构复杂,质量大,难以满足折叠翼在短时间内以小力矩快速展开的需求。
本文设计的无人机折叠翼展开机构具有体积小、质量轻、展开力矩小、展开时间短的特点。首先,对折叠翼展开机构进行展开方案设计。其次,建立折叠翼动力学模型,仿真分析折叠翼展开机构采用不同展开方案对折叠翼展开时间及铰链力矩的影响,确定折叠翼最优展开方案。最后,完成无人机折叠翼展开机构的设计。
1 折叠翼展开方案设计
无人机折叠翼展开机构的展开方案关系到折叠翼展开时间,为了实现在短时间内通过小力矩使得折叠翼完全展开到位并锁定,提出3 种可行性较高的折叠翼时序展开方案并进行分析。分别为同步展开方案、分步展开-机翼优先展开方案和分步展开-机翼固定板优先展开方案。
1.1 折叠翼展开工况及需求分析
无人机折叠翼有多种折叠方式,取以下2 种折叠方式进行分析,选用最优的折叠方式作为折叠翼展开方案设计对象。
(1) 展开机构安装在无人机机身靠近机头位置并向机尾方向折叠,机翼平行并贴近于机身;
(2) 展开机构安装在无人机机身中间位置并向机头方向折叠,机翼平行并贴近于机身。
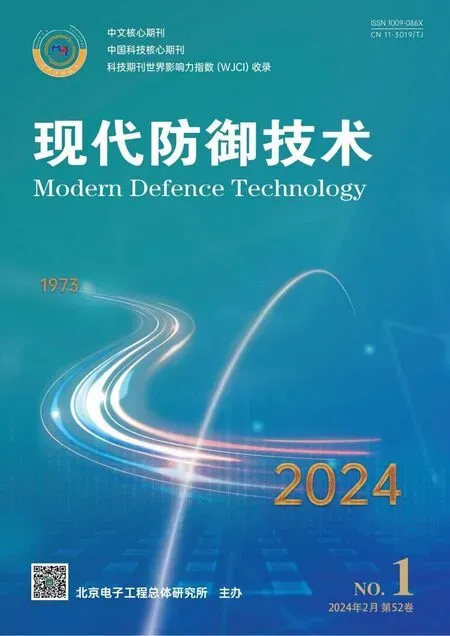
采用折叠方式1(如图1)时,折叠翼由机尾向机头方向展开,在无人机处于飞行状态时,折叠翼展开方向与无人机飞行方向相同,因此折叠翼展开机构在展开过程中会受到较大的空气阻力,在相同的展开时间内会导致折叠翼展开机构展开所需动力增大,不利于折叠翼机构的展开动作;采用折叠方式2(如图2)时,折叠翼由机头向机尾方向展开,在无人机处于飞行状态时,折叠翼展开方向与无人机飞行方向相反,因此在折叠翼展开机构的展开过程中空气阻力会对折叠翼展开机构产生助推作用,从而减小折叠翼展开机构展开所需动力,降低对动力源的选择要求。对比2 种安装位置和折叠方向的优劣,采用折叠方式2即将折叠翼展开机构安装在无人机机身中间位置并向机头方向折叠,机翼平行并贴近于机身。
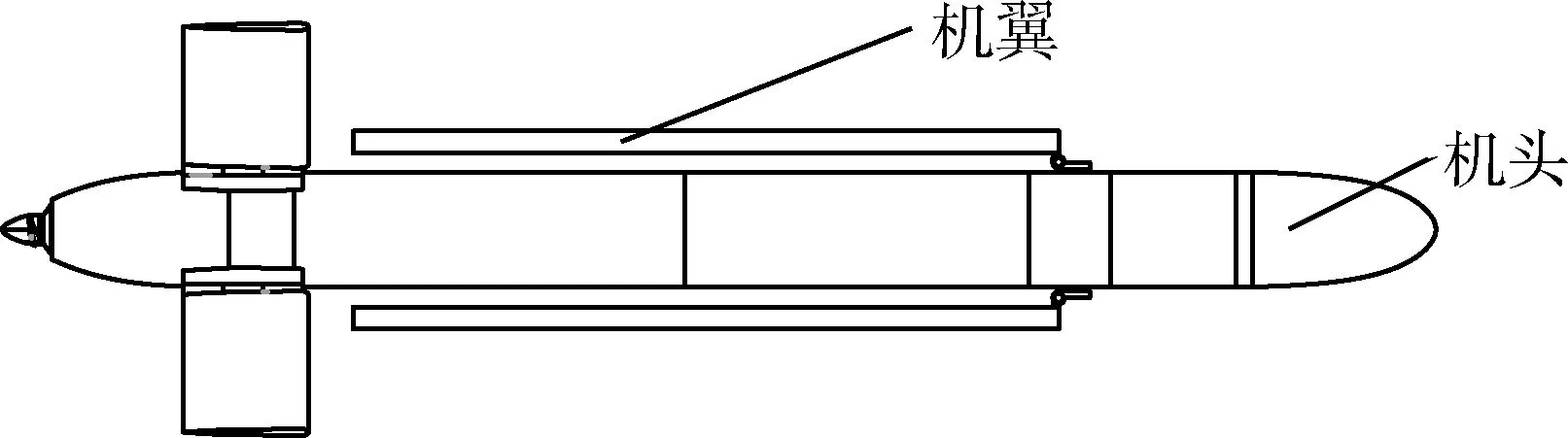
图1 折叠方式1Fig. 1 Folding modes 1
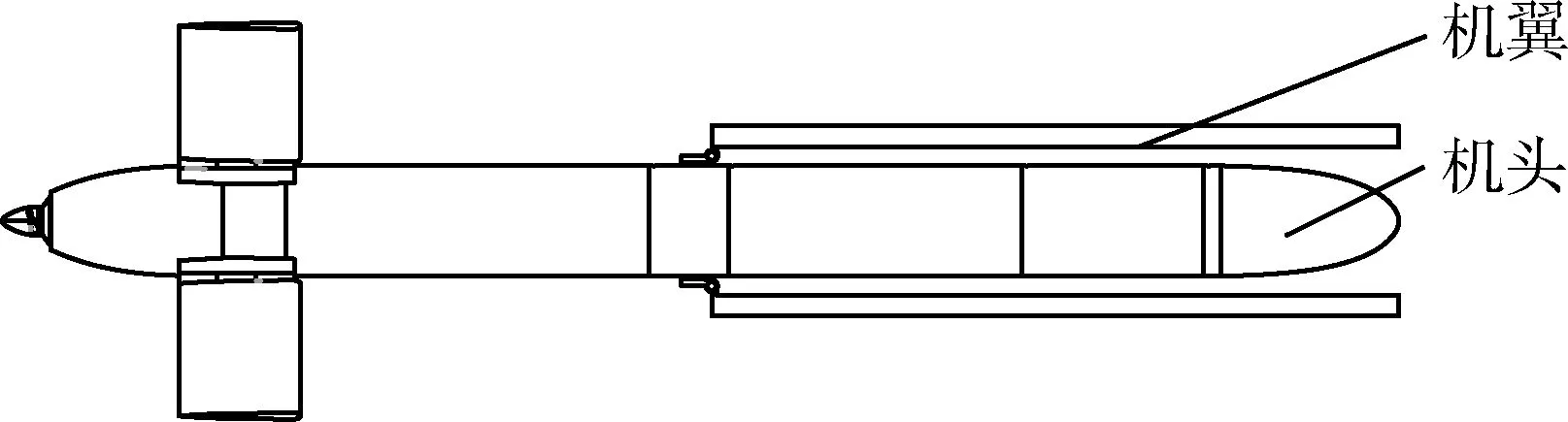
图2 折叠方式2Fig. 2 Folding modes 2
对无人机折叠翼展开机构的展开需求如下:
(1) 折叠翼完全展开到位时间要求在1 s 内,要求折叠翼迅速展开到正确位置,并在机翼展开到位时,锁定机构对机翼完成锁定;
(2) 在折叠翼展开机构展开过程中2 个转动副之间不发生干涉,在折叠翼展开到位瞬间,对于机身的冲击载荷不能过大;
(3) 折叠翼展开机构的结构设计要求结构简单、质量轻。
1.2 折叠翼展开多方案设计
折叠翼展开机构的展开运动主要包含以转轴1为转动轴的机翼固定板翻转运动和以转轴2 为转动轴的机翼展开运动,其中转轴1 沿y轴方向,转轴2沿z轴方向,如图3 所示。
图3 折叠翼展开示意图Fig. 3 Schematic diagram of folding wing deployment
无人机折叠翼展开机构的展开方案根据展开时序的不同,可以有3 种展开方案。
(1) 同步展开。即以转轴1 为转动轴的机翼固定板翻转运动和以转轴2 为转动轴的机翼展开运动同时进行。机翼由于自重,会加速机翼固定板的翻转运动,而机翼固定板的快速翻转产生的惯性载荷会增加机翼展开时的附加力矩,因此会使机翼展开过程中动力源载荷增加,不利于机翼的展开运动。同步展开方式下折叠翼展开过程如图4 所示。
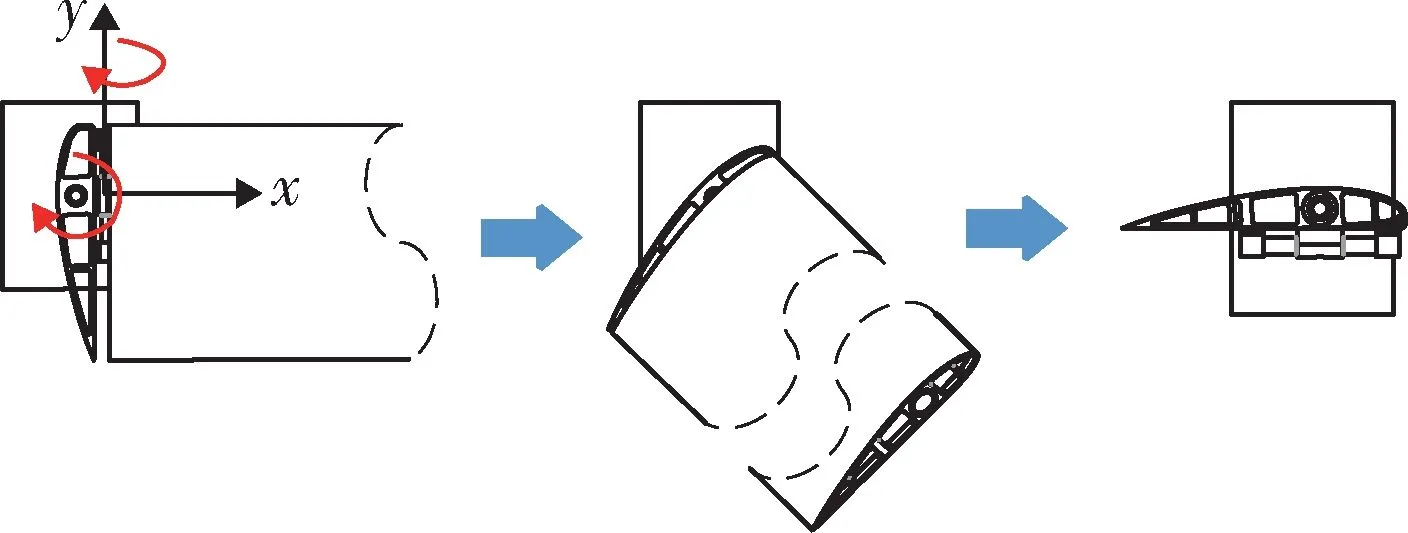
图4 折叠翼展开过程(同步展开)Fig. 4 Folding wing deployment process(synchronous deployment)
(2) 分步展开-机翼优先展开。即以转轴2 为转动轴的机翼优先展开,待机翼完全展开到位并锁定后,以转轴1 为转动轴的机翼固定板再进行翻转运动。在机翼展开过程中,机翼旋转轴线方向与重力方向平行,因此重力在机翼展开过程中的影响可以忽略,减少了机翼展开运动驱动源的载荷。在机翼展开到位并与机翼固定板锁定后,机翼固定板进行翻转运动,此时机翼与机翼固定板同处于转轴的轴线上,所以以转轴为转动轴的机翼固定板的翻转运动受重力的影响较小。机翼优先展开的折叠翼分步展开过程如图5 所示。
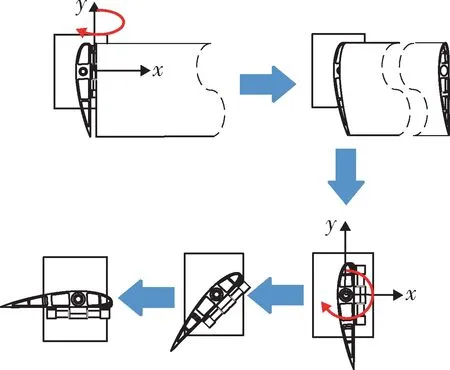
图5 折叠翼展开过程(分步展开-机翼优先展开)Fig. 5 Folding wing deployment process(stepwise deployment -wing first deployment)
(3) 分步展开-机翼固定板优先翻转。机翼固定板优先进行翻转运动,待机翼固定板翻转到位后,机翼再进行展开运动。机翼由于自重下落,这使得机翼固定板翻转运动驱动源的载荷减少。在机翼固定板翻转到位后,机翼进行展开运动,在机翼展开过程中,需要克服重力做功,增加了机翼展开运动驱动源的载荷。机翼固定板优先翻转的折叠翼展开过程如图6 所示。

图6 折叠翼展开过程(分步展开-机翼固定板优先翻转)Fig. 6 Folding wing deployment process(stepwise deployment-wing fixed plate first flip)
综上所述,考虑机翼展开所需驱动力矩,展开方案2 比方案3 具有一定的优势。因此,仅对方案1和方案2 建立动力学模型分析,以下称方案1 为同步展开方案,方案2 为分步展开方案。
2 折叠翼展开动力学分析
采用拉格朗日法建立折叠翼展开机构展开动力学模型,将无人机折叠翼展开机构简化模型导入Fluent 仿真分析。以折叠翼展开过程中所需驱动力矩与展开时间作为评判标准,依据仿真数据具体分析2 种时序展开方案对折叠翼展开机构驱动力矩和展开时间的影响,确定折叠翼展开机构的最佳展开方案,从而完成折叠翼展开机构的结构设计。
2.1 折叠翼展开动力学理论分析
根据折叠翼展开机构的工作原理,建立折叠翼的简化模型,如图7 所示。无人机折叠翼展开机构的展开运动分为机翼固定板绕转轴1 的翻转运动和机翼绕转轴2 的展开运动两部分,在其运动过程中,α1为t时刻机翼固定板绕转轴1 翻转的角度,α2为t时刻机翼绕转轴2 转过的角度。
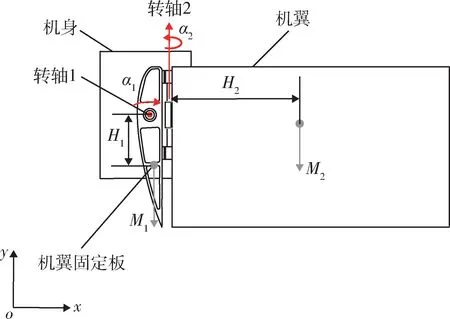
图7 折叠翼简化模型Fig. 7 Simplified model of the folding wing
以折叠翼系统作为分析对象,建立动力学模型。根据拉格朗日法,定义拉格朗日函数为L,拉格朗日方程可写为
式中:E为系统的动能;V为系统的势能;Q为广义力阵;q为关节运动广义坐标;τ1为转轴1 实际所受力矩;T1为转轴1 处驱动力矩;TD1为空气阻力对转轴1的阻力矩;τ2为转轴2 实际所受力矩;T2为转轴2 处驱动力矩;TD2为空气阻力对转轴2 的阻力矩。
2.1.1 折叠翼同步展开方案动力学分析
折叠翼同步运动中,折叠翼系统的动能包括两部分关节轴动能,可表示为
式中:E1为转轴1 动能;E2为转轴2 动能;I1为机翼固定板相对于转轴1 的转动惯量;I2为机翼相对于转轴2 的转动惯量;α1为机翼固定板翻转角度;α2为机翼展开角度;M1为机翼固定板质量;M2为机翼质量;H1为机翼固定板重心到转轴1 轴线的垂直距离;H2为机翼重心到转轴2 轴线的垂直距离。
折叠翼各转轴势能可表示为
式中:V1为转轴1 重力势能;V2为转轴2 重力势能。
将式(1),(6)和(8)联立可得同步展开的驱动力矩的动力学方程为
2.1.2 折叠翼分步展开方案动力学分析
折叠翼分步展开运动中,其动能包括两部分关节轴动能,如式(5)所示,其中各动能项具体形式为
当机翼优先完成展开动作,这一过程中,机翼在重力方向上不产生位移,所以转轴2 的势能变化为0,转轴1 的势能为
将式(1),(10)和(11)联立可得在分步展开时驱动力矩的动力学方程为
2.2 折叠翼展开过程仿真效验
建立折叠翼简化模型,在Fluent 中设定飞行状态参数如表1 所示。

表1 飞行状态参数Table 1 Flight status parameters
流场选择圆柱形边界框,流场半径为5 m,流场长度为20 m,流场最大长度为翼弦的80 倍。为了选择合适的网格数目,对多个网格数目进行网格测试。网格数目为1.5×105,2×105,4.6×105,10×105,13×105。图8 显示了网格数目对升阻比的影响,网格数目越多,收敛值越准确。
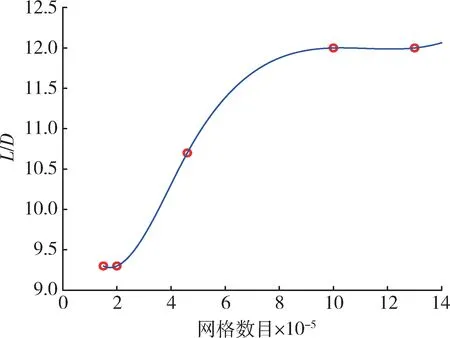
图8 网格数目对升阻比的影响曲线Fig. 8 Influence curve of girds number on lift-drag ratio
采用膨胀法生成网格如图9 所示。流场边界条件设定飞行速度为入口边界条件,设定压力为出口边界条件,壁面边界条件定义为无滑动壁。将流场网格导入Fluent 中,假设折叠翼展开时间为1 s,设置迭代次数为500 次,时间间隔为0.002 s。利用UDF(users defined functions)子程序控制折叠翼动作,采用K-ε湍流模型进行模拟。

图9 流场网格Fig. 9 Flow field grid
将简化折叠翼模型导入到Fluent,仿真过程如图10,11 所示。
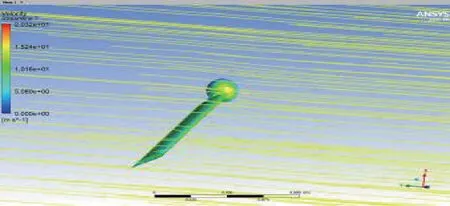
图10 同步展开过程Fig. 10 Synchronous deployment process
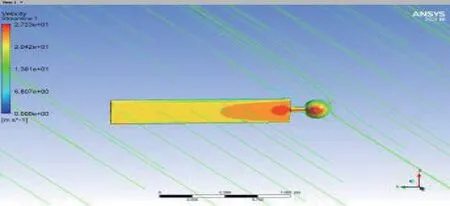
图11 分步展开过程Fig. 11 Stepwise deployment process
2.3 气动力仿真结果与分析
在Fluent 中得到在折叠翼展开过程中的空气阻力矩曲线如图12,13 所示,图12 为折叠翼同步展开过程中空气对转轴1 及转轴2 的阻力矩曲线。图13为折叠翼分步展开过程中空气对转轴1 及转轴2 的阻力矩曲线。
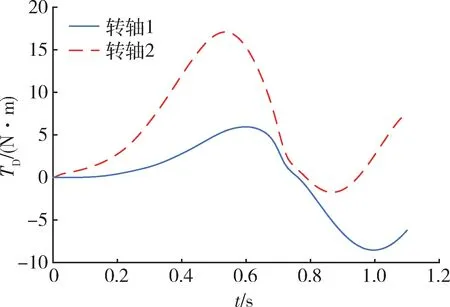
图12 空气阻力矩-时间曲线(同步展开)Fig. 12 Curve of air resistance moment-time(synchronous deployment)
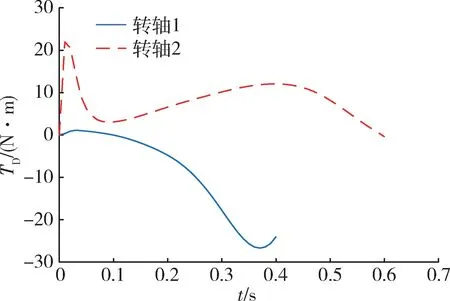
图13 空气阻力矩-时间曲线(分步展开)Fig. 13 Curve of air resistance moment-time (stepwise deployment)
经多次仿真验证,在满足折叠翼1 s 内完成展开运动的前提下,采用同步展开方案时,机翼固定板完成翻转动作,即转轴1 完成动作所需驱动力矩为9 N·m;机翼完成展开动作,即转轴2 完成动作所需驱动力矩为17 N·m,同步展开状态下的折叠翼展开角度-时间曲线如图14 所示。采用分步展开方案时,机翼固定板完成翻转动作,即转轴1 完成动作所需驱动力矩为8 N·m;机翼完成展开动作,即转轴2 完成动作所需铰链力矩为14 N·m,均小于同步展开方案下折叠翼展开所需驱动力矩。分步展开状态下的折叠翼展开角度-时间曲线如图15 所示。
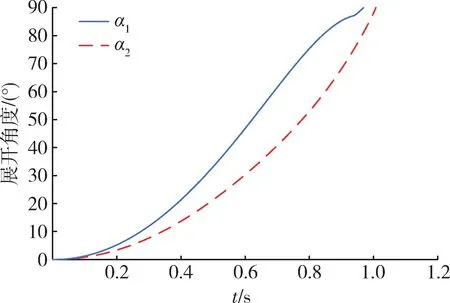
图14 展开角度-时间曲线(同步展开)Fig. 14 Curve of deployment angle-time(synchronous deployment)

图15 展开角度-时间曲线(分步展开)Fig. 15 Curve of deployment angle-time(stepwise deployment)
综上所述,无人机折叠翼展开机构采用分步展开方案相对于同步展开方案具有一定优势,分步展开时将空气阻力作为机翼展开的动力,减小了机翼展开所需驱动力矩,从而降低对驱动源的要求,也扩大了驱动源选择范围,实现质量轻、体积小的设计目的。
3 折叠翼展开机构设计
无人机折叠翼展开机构可分为分步触发机构、水平展开机构、竖直翻转机构三部分。分步触发机构的功能是控制水平展开机构和竖直翻转机构顺序动作;水平展开机构的主要功能是将折叠状态的机翼展开成与机身根部垂直的状态;竖直翻转机构主要功能是将机翼从垂直状态翻转到水平状态并锁定。
3.1 驱动组件设计
(1) 转轴1 处驱动组件
转轴1 处扭簧为机翼翻转提供驱动力。在机翼竖直翻转机构中采用2 套扭簧分别安装于机翼两侧。扭簧的固定臂由安装于内衬挡板上的销固定,施力臂安装于转轴1 的卡槽内,如图16 所示。
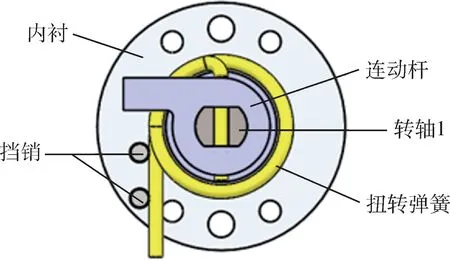
图16 转轴1 处扭簧安装示意图Fig. 16 Installation diagram of torsion spring at the position of the rotating shaft 1
(2) 转轴2 处驱动组件
转轴2 处卷簧主要是提供机翼从折叠状态到展开状态所需的驱动力,如图17 所示。为了实现无人机折叠翼展开机构分步展开的目的,铰链上增加了展开销的设计,由连杆控制展开销撤出,从而使得铰链运动,机翼进行展开运动,如图17 所示。
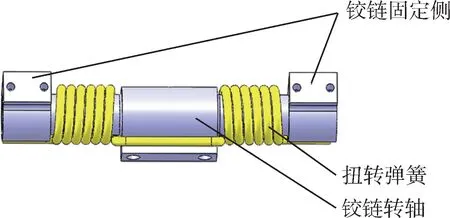
图17 转轴2 处扭转弹簧安装示意图Fig. 17 Installation diagram of torsion spring at the position of the rotating shaft 2
3.2 展开机构结构设计
(1) 分步触发机构
分步触发机构主要由电推杆、连杆、展开销、弧形挡块等组成。电推杆动作,带动连杆绕固定铰链旋转,使得展开销从转轴2 中拔出。弧形挡块端面设计成以固定铰链为圆心的圆弧面,在连杆旋转过程中可以保证在一定时间内转轴与挡块的接触面积不变,从而实现机翼展开到位后,机翼固定板再翻转的分步展开的目的,如图18 所示。
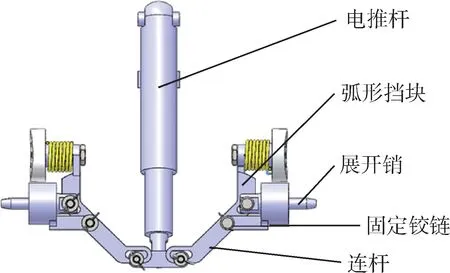
图18 分步触发机构示意图Fig. 18 Schematic diagram of stepwise trigger mechanism
(2) 水平展开机构设计
水平展开部分主要由转轴2、机翼、展开销、挂钩等组成。机翼通过铰链转轴安装在转轴2 组件上,当展开销拔出后,在扭转弹簧的驱动力作用下,机翼绕铰链转轴轴线向上展开,机翼展开到位后由挂钩锁定,如图19 所示。
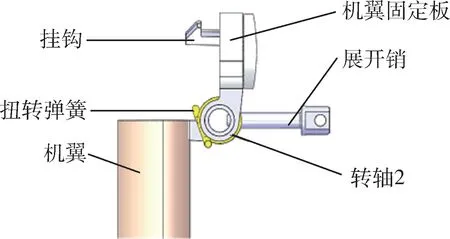
图19 水平展开结构示意图Fig. 19 Schematic diagram of horizontally unfolded structure
(3) 竖直翻转机构设计
竖直翻转机构主要由转轴1、扭转弹簧、弧形挡块、机翼固定板等组成,如图20 所示。随着连杆的旋转,弧形挡块逐渐滑移直至不再限制转轴1 翻转,此时在扭转弹簧的驱动力作用下,机翼固定板完成翻转运动。
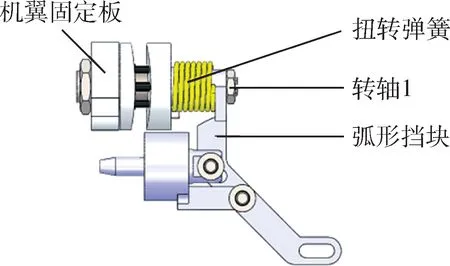
图20 竖直翻转与锁定结构示意图Fig. 20 Schematic diagram of vertical flip and locking structure
综上,无人机折叠翼展开机构总体图如图21所示。
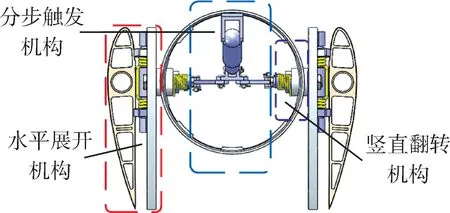
图21 无人机折叠翼展开机构示意图Fig. 21 Schematic diagram of folding wing deployment mechanism of UAV
4 关键部件强度分析
为保证装置结构稳定性和可靠性,对整体结构做静力学分析,经分析验证,折叠翼展开机构可满足单个平翼在负载168 kg 的状态下可靠飞行。展开机构的应力及应变云图如图22,23 所示。
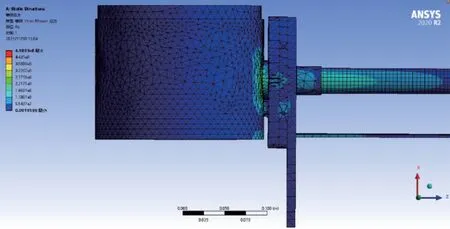
图22 展开机构应力云图Fig. 22 Stress cloud diagram of unfolded mechanism
机身、机翼固定板、转轴1、转轴2 等关键部件所受应力及应变量如表2 所示。
5 结论
本文针对无人机的展开需求,提出了一种折叠翼分步展开方案。建立了无人机折叠翼动力学方程,并进行了理论分析和Fluent 仿真计算,分析了分步展开方案的可行性。根据折叠翼分步展开总体方案,设计了相应的展开机构,并分析了分步展开机构的可行性,得到如下结论:
(1) 无人机折叠翼采用分步展开方案可减小重力及气动力对展开过程的影响,实现在短时间内以小力矩使折叠翼展开;
(2) 折叠翼分步展开机构采用的分步触发机构结构简单,采用扭转弹簧作为动力源,体积小,质量轻。展开机构符合无人机轻量化设计需求。