反高超声速导弹网格化拦截战法初步研究 *
2024-03-18王松邵圣祥栾晓文张帅钦
王松,邵圣祥,栾晓文,张帅钦
(再入动力学与目标特性实验室,新疆 库尔勒 841001)
0 引言
高超声速导弹以其速度快、精度高、突防能力强等特点,也已成为大国打破战略平衡、打赢未来战争的新型“杀手锏”[1]。识变应变,积极变革,探索提升反高超声速导弹作战能力,对于应对国家空天威胁和维护国家安全稳定具有重要意义[2]。目前已有多个国家部署或正在研制高超声速武器[3-7],与此同时,世界主要大国争相发展高超声速目标防御作战能力[8-12]。在高超防御体系建设方面,美国强势领先[13-15],俄罗斯稳步推进[2]。
当前利用动能拦截弹实施高超声速导弹防御作战,需要依赖有效的目标轨迹预报技术[16-17]。因为拦截弹从发射到拦截交会,需要经历一定时间(通常约百秒量级),所以只有在轨迹预报支援的基础上,才能实现拦截弹预先发射。目标轨迹预报精度的高低直接影响拦截成功率。大体上,可将拦截弹飞行轨迹分为2 段:一是在火控雷达(或指控中心)引导下达到预定的区域;二是采用自主寻的技术实现弹目交会,即利用KKV(kinetic kill vehicle)实现自主拦截交会。目标轨迹预报可以有效支援拦截作战,就是因为拦截弹飞行的第一段需要预知拦截交会点的大概位置,而且该位置越精确越有利于KKV 实现自主寻的制导。
在高超声速导弹防御作战领域,预警探测方面已有很多公开报道[10,18-19],但拦截战法方面鲜有报道[20]。反高超声速导弹作战与弹道导弹防御作战存在很大不同,必须探索新战法。与弹道导弹相比,高超声速导弹飞行高度较低,造成防御作战高度空间被压缩,又因为机动飞行的特点,导致难以实现目标轨迹的长时间预报。因此,本文提出了分布式网格化拦截战法,实现了目标短期轨迹预报下的拦截规划,并结合高超声速巡航导弹的来袭场景完成了初步演示。
1 反高超声速导弹拦截战法转型的必要性
1.1 反高超声速导弹拦截作战的难点分析
高超声速导弹主要包括助推滑翔式导弹和吸气式巡航导弹,2 种导弹具有不同的弹道特性,见图1。图中可见,高超声速导弹飞行高度较弹道导弹更低,受地球曲率影响,地基雷达的有效探测弧段较短,这给导弹预警探测和目标指示带来很大挑战。
图1 高超声速/弹道导弹弹道示意图Fig. 1 Diagram of hypersonic and ballistic missiles
助推滑翔式高超导弹具有较强的机动特性,而吸气巡航式可发挥主动飞行优势(类似于飞机一类的空气动力目标),可完成横向转弯,也就是说二者均具有较好的机动特性,且飞行速度比普通飞机快得多。机动和高速特性的结合,给拦截作战带来极大挑战。总之,在较低空域的高速机动特性,让现有导弹防御系统难以发挥应有的作战效能,对现有拦截战法造成很大冲击。
1.2 识变和应变,必须探索新的拦截战法
在拦截弹道导弹过程中,能够充分利用其轨迹可预报的特点,从而实现地基动能反导作战。中段反导时,拦截弹通常是守时发射,也就是利用预报轨迹和预定交会点,可预先设定拦截弹的飞行轨迹并完成守时发射。中段反导可实现区域防御作战,仅需分散部署少数拦截阵地,即可实现国土区域的反导作战。然而,高超声速来袭目标的高速机动特性导致中段反导这类作战样式不再适用。探索新作战样式和战法,谋求高超声速导弹攻防两端的战略平衡,势在必行。
2 反高超声速导弹的网格化拦截战法
2.1 网格化拦截战法的提出
考虑高超声速导弹的多个飞行阶段,比较可行的拦截阶段是飞行中段,即滑翔段或巡航段。虽然针对高超声速目标防御作战已有多方面的论述,但是目前仍然没有成熟的防御方案。一方面受限于跟踪探测能力,另一方面受限于对拦截弹性能的苛刻需求,通常需要机动能力达到来袭导弹的2~3 倍,这对拦截弹机动过载能力提出了较高要求。
跟踪探测方面,随着低轨传感器的部署,高超声速导弹的跟踪探测正在得到解决。一般要求拦截弹能够实时追踪高超声速导弹的轨迹,利用雷达和红外导引头完成自主寻的制导。
在弹道导弹防御作战中,按拦截高度实现了分层防御的作战方案,如中段拦截、末段高层拦截和末段低层拦截等。相比之下,高超声速导弹飞行高度较低,巡航弹基本在30 km 高度内飞行,分层拦截战法不再适用。此外,高超声速导弹机动能力强,导致无法制定远程拦截预案,只能根据短期的轨迹预报灵活制定拦截方案。当拦截方案只是面向短期目标时,对拦截弹的机动过载性能要求就会有所降低。因此,提出了分布式网格化拦截战法。在地面部署多个拦截器(和探测器),形成防御作战网格,当来袭高超声速导弹飞入防御网格后,任凭其如何机动飞行,都在拦截网格防御范围内。
2.2 新战法的可行性和优势分析
网格化拦截战法离不开对来袭目标的短期轨迹预报,而基于短期轨迹预报的拦截作战规划是可行的。通过短期轨迹预报,比如100 s 的预报时长,可有力支援拦截规划。高超声速导弹虽然号称机动能力强,但受限于发动机能力和目标运动惯性,其转弯不可能是直角,必然存在较大的转弯半径。况且机动飞行对导弹本体结构冲击较大,巡航式机动飞行油耗猛增,导致目标不可能无限制进行飞行机动。因此,短期轨迹预报结果通常是可信的,结合拦截器网格的优化部署,短期轨迹预报能够有效支撑拦截作战规划。
网格化拦截战法体现了分布式作战思想,作战弹性足,抗毁能力强。“星链”模式让全世界看到分布式组网的巨大优势,即便在战时某些载荷受到强电磁干扰甚至失效,也不影响“星链”整体效能的稳定发挥,这种作战优势已经在俄乌冲突中得到了实战验证。采用网格化拦截战法能够发挥分布式作战优势,满足反导作战的抗毁伤与快速反应需求,在若干节点无法响应作战时,能够通过即时最优式作战管理来确定当前作战网格的最优拦截规划,从而达成既定作战目的。
网格化拦截战法可发挥体系作战优势,并通过降低单个拦截器的性能指标,显著降低拦截器单价。在中段反导作战系统中,拦截武器自身技术先进、作战能力突出,但造价十分昂贵,且中段反导作战配属的高精度火控雷达同样是价值不菲。如果不求革新,单纯照搬中段反导的作战模式,就无法实现反高超声速导弹的国土防御作战,起码经济上是负担不起的。而网格化拦截战法可有效降低单个拦截器的性能需求。因为高超声速导弹飞行高度较低,所需拦截器具备中短程拦截能力即可(如射程200 km),如此可显著降低单枚拦截器成本(例如美军陆基中段反导拦截弹单枚成本达到1.09 亿美元,而“爱国者”拦截弹单枚造价约300 万美元)。依靠大批量生产和模块化组装及维护保养,可进一步降低单枚拦截弹的成本。因此,网格化部署虽然所需拦截器数量多,但单价的显著降低,为控制建设成本提供了一种可能。
2.3 拦截器网格化部署模型
确定网格尺度大小需要综合考虑拦截器性能参数和拦截成功率等因素,可归纳为一种多约束条件下的最优化问题。网格划分越密,越容易达成作战目的,但费效比也越高。以正方形网格为例,建立如下估计模型。
假设当来袭目标进入拦截网格上空时,需要保证实时不少于n个网格节点处的拦截弹具备拦截条件,可得到约束关系为
其中:x为网格边长;Rx为有效拦截斜距;R为地球半径;h为来袭导弹飞行高度,a取值由n决定,当n=1时,,当n=2 时,a= 1。
该约束条件代表的几何关系见图2,其中ax为来袭目标对应的经纬度位置(导弹星下点)到拦截器网格节点的大地线长。拦截器位于正方形网格节点处,考虑星下点与拦截器网格的位置关系,不难得到,如果星下点位于网格中心(图中n=1 的情况)时具有至少1 枚拦截弹的拦截条件,那么对于其他位置的星下点也满足至少1 枚可拦截的需求。同理可分析n=2 的情况。实际上,a代表几倍的网格边长,从约束关系来看,a取值越小,可取的网格边长越大。
图2 2 种情况下计算拦截器部署网格边长示意图Fig. 2 Diagram of interceptor deployment grid size computation with two cases
拦截器部署网格边长随拦截器拦截斜距和导弹高度的变化结果如图3 所示。可见网格边长随来袭导弹高度增大而缓慢变小,网格边长主要受制于拦截弹的有效拦截斜距。随着拦截斜距增大,网格边长显著增大。2 个点位可拦截约束下的网格边长小于1 个点位情况,且差距随着拦截斜距的增大而变大。
图3 网格边长随拦截斜距和导弹高度的变化Fig. 3 Grid size versus interceptor slant-range and target height
根据上述计算模型,可制定拦截器网格化部署方案。例如,当拦截器最远拦截斜距为200 km、来袭导弹高度不超过40 km 情况下,拦截器部署网格边长上限为195 km,在纬度方向大概跨越1.75°。拦截器有效拦截斜距受到弹道有效预报时长的影响,有效拦截斜距不超过平均飞行速率与预报时长之积,提高拦截器飞行速度和提高有效预报时间,都可以提升有效拦截斜距。从另一方面讲,如果有效预报时间不超过100 s,那么拦截器的射程设计指标应当参考平均飞行速度而定。例如,如果平均飞行速度为2 km/s,那么其射程设计指标仅需满足拦截斜距200 km 即可。
2.4 基于短期轨迹预报的拦截规划流程
利用天基低轨传感器网络实现对来袭导弹目标的实时探测,并结合拦截弹的火控雷达,获取来袭导弹的实时位置、速度信息。利用目标轨迹短期预报算法,将来袭导弹的轨迹实时外推预报100 s。对拦截弹飞行轨迹进行动力学建模,得出当前预报轨迹上的可行交会点、拦截窗口和交会参数(如交会角度、相对速度、经纬度等)。根据交会参数进行拦截任务快速规划,确定出用几个拦截点的几发拦截弹实施拦截。各个拦截点实时共享规划结果并完成拦截弹守时发射。拦截弹发射后,按预定交会点飞行,在预定交汇点与实际偏差小于一定阈值时,适时开启自主寻的并完成自主拦截。
在特殊情况下指挥员可进行否定式干预,终止拦截弹发射。利用天基传感器和地基探测设备及时评估拦截效果,如果不成功,则快速规划下一次拦截。直到所有来袭导弹被拦截,拦截任务规划流程详见图4。
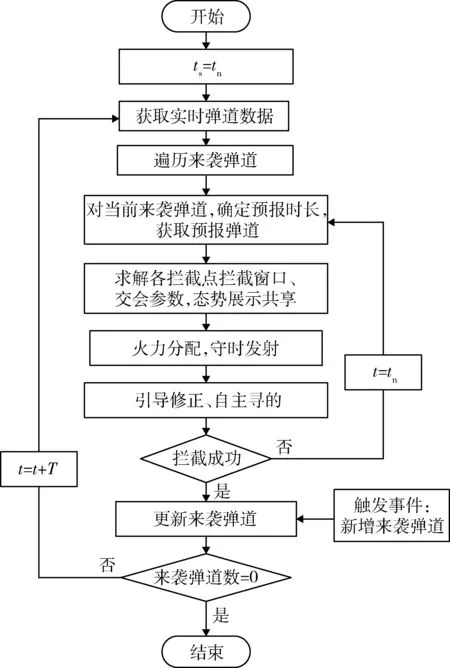
图4 基于短期轨迹预报的拦截规划流程Fig. 4 Intercept process using short-term trajectory prediction
3 某作战场景下的网格化拦截运用与分析
想定强敌从海上发射高超声速巡航导弹袭击我内陆关键目标。来袭导弹的飞行弹道在上海地区出现了大范围横向机动,如图5 中虚线所示。预定的多个拦截点部署情况见图中“mx-x”格式的标注,拦截点部署网格边长为195 km。

图5 拦截态势Fig. 5 Example of intercept situation
通过目标轨迹的短期实时预报,可得到来袭导弹飞行的预报弹道见图5 中彩色轨迹。以“m8-10”拦截点为例,从发射点到交会点先后存在多个可行的拦截弹飞行轨迹(从右向左)。由于来袭导弹的横向机动,导致首批拦截交会点与目标实际位置存在较大偏差,此时依靠后续拦截仍然能够完成拦截任务。即便“m8-10”错失拦截机会,下一网格点“m7-9”仍可遂行拦截任务。
假设单枚拦截弹的拦截成功率为p,每次拦截规划n1枚拦截弹实施拦截任务,共拦截n2次,那么最终拦截成功概率为,式中指数项n2体现出网格化分布式拦截的优势。当总拦截成功率P=99%时,单枚拦截弹拦截概率p随n1和n2的变化关系见表 1。可见当拦截规划3 次,每次发射2 枚拦截弹,仅需单枚拦截概率约0.54 即可达到99%的拦截成功率。因此,网格化拦截战法可降低对单枚拦截弹的性能要求。
归纳作战规划原则为:①首次预报轨迹后,具备拦截条件,应拦尽拦;②优先选择交会窗口近的拦截点实施拦截;③当前预报轨迹上交会点太晚,等待5 s 再次拦截规划;④发现目标机动(如偏出预报位置超过2 km),立即再次拦截规划;⑤无机动可待拦截评估做决策。
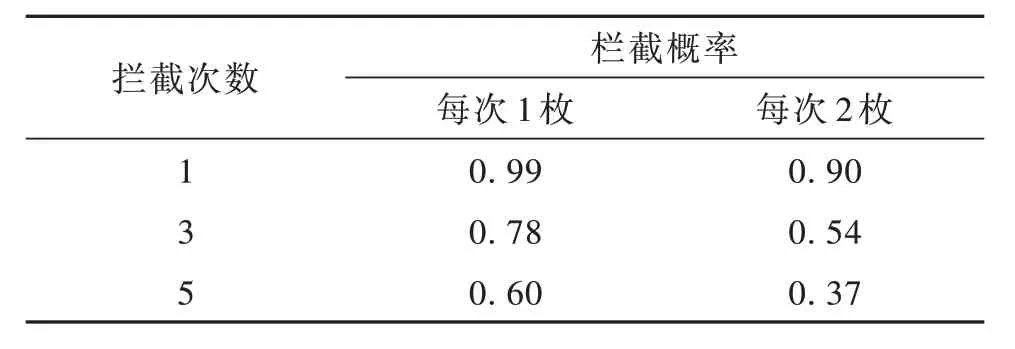
表1 达成拦截概率99%情况下所需单枚拦截弹成功率Table 1 Needed interception success rate for one interceptor when meeting the 99% total success rate
4 结束语
当前,高超声速导弹技术迅猛发展,为维持大国竞争优势和战略平衡,反高超作战力量建设也应提上日程。应对高超声速导弹威胁,必须做到识变和应变,打破原有反弹道导弹的作战思路。弹道导弹防御中,通常采用分层拦截方案,而高超声速导弹巡航/滑翔飞行高度较低(20~40 km),需要创新拦截手段。为此,提出了反高超声速导弹的网格化拦截战法,以期实现由分层防御向分布式防御的转型发展。
网格化拦截战法体现了分布式作战思想,满足作战弹性和快速响应需求。该战法可发挥体系作战优势,降低对单个拦截武器的性能需求,从而显著降低单枚拦截器成本。给出了拦截器网格化部署模型,和基于短期轨迹预报的拦截规划流程。通过作战推演,初步完成了网格化拦截战法的模拟,并归纳了拦截规划战法原则。其核心是基于目标轨迹短期预报的拦截任务规划,利用拦截器的网格化分布式部署,根据来袭目标的短期预报弹道,可有效应对高超声速目标机动飞行带来的不确定性威胁。