空间多目标掠飞观测接近轨道设计方法 *
2024-03-18刘育昊张兵方子今
刘育昊,张兵,方子今
(1. 航天科工空间工程发展有限公司,北京 100854;2. 航天科工第二研究院 研究生院,北京 100854)
0 引言
随着空间目标的日益增多以及空间环境的日渐复杂,各国对于空间态势感知能力的要求越来越高,而空间目标天基观测系统是未来空间态势感知的重要发展方向[1]。前人在天基空间目标观测领域也做了很多的研究。文献[2]研究了对于一个确定目标找到一条燃料最优转移轨道采用机动变轨方式进行观测的问题,该方法存在观测效率低,付出代价大的缺点。文献[3]研究了采用不变轨的方式对多个目标进行抵近,问题在于它采用双星基准确定初轨的方式,该定轨方式对于前2 个目标的观测属于一个轨道周期内完成观测,并不满足全局最优,且该方式对于目标的位置与时间要求较高。此外,它简单地满足了距离约束,并未考虑天光地影条件以及相对角速度约束对于观测效果的影响。
为了获得更好的观测效果,在满足天光地影约束条件以及相对角速度约束条件下,观测距离越近越好。在一次空间观测任务中,航天器所带燃料十分有限,而最为节省燃料的方式就是航天器在自身轨道上自然飞行的同时实现对目标的观测[4-9]。
本文重点研究了在满足天光地影约束条件和相对角速度约束条件下,从优化轨道六根数的角度出发,对多目标进行近距离掠飞观测的轨道设计方法,解决了在空间天基领域观测效率低、效果不好的问题。
1 空间多目标观测模型
1.1 求解两轨道面目标的最近距离
1.1.1 理论最近距离求解
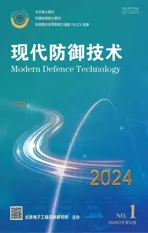
如图1 所示,假设航天器A和目标卫星T1的轨道均为近圆轨道。航天器A的轨道面P与目标卫星T1轨道面P1存在交线L1,理论上当航天器A与目标卫星T1同时运行到交线的同一端的时候,它们之间的距离将达到最小值,此时的最小值只是理论上的最小值,航天器和卫星要经过长时间的在轨运行,利用轨道高度差产生的周期差,才可能使它们同时到达交线位置。然而从实际情况来说,通常是不能同时运行到交线上的,总是会差一些相位,即得不到这个理论最小值,所以我们需要计算在一定的时长内,航天器与目标所能达到的最近距离[3]。
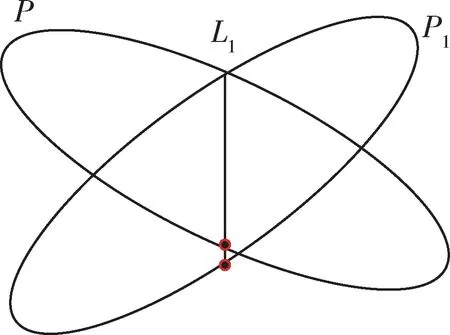
图1 两轨道面日标最近距离示意图Fig. 1 Schematic diagram of the nearest distancebetween targets on two orbit planes
根据以上分析可知,航天器与目标之间的最近距离在它们轨道面交线得到,由此可以得到一个一定时长内航天器与目标最近距离的求解方案:在一定时长内,求出航天器位于轨道面交线上的各个时刻以及这些时刻目标在轨道上所对应的位置,然后求出这些位置点与地心连线与交线夹角的角度,最小角度所对应目标点的位置即为这段时间内航天器与目标最近距离所对应的位置,公式推导如下。
由轨道根数可得轨道面的法向矢量为
假设航天器轨道面与目标卫星轨道面的法向矢量分别为n1和n2,由此可以得到两轨道面的交线矢量为
偏心率单位矢量为
当航天器与目标卫星同时到达交线位置时,由交线矢量RC及偏心率单位矢量e可求得航天器与目标卫星的真近点角f1和f2分别为
假定航天器与目标卫星在各自轨道上真近点角分别为f1和f2处的地心矢量分别为R1和R2,此时航天器与目标卫星理论上的最近距离为
因为2 个轨道面有2 个交点,将f1和f2加上180°后,依旧利用式(5)即可求得航天器与目标卫星在交线另一端的最近距离理论值Rmin,由此即可得到航天器与目标卫星的理论最近距离。
1.1.2 实际最近距离求解
以上计算的是航天器与目标卫星理论上的最小距离,而在实际运行当中几乎不可能达到理论上最小值所对应的位置。接下来是对限定时间内,航天器与目标卫星实际所能达到最近距离的求解。
将航天器在交线处的真近点角转化成偏近点角:
将偏近点角再转化为平近点角:
航天器在轨道上的平动速度为
式中:μ为地心引力常数;a1为航天器轨道半长轴;e1为偏心率矢量e1的大小。
由此可以得到航天器通过交线位置的时刻为
式中:tp1为航天器通过近地点的时刻。
在t1基础上加上航天器周期的整数倍即可得到航天器每次通过交线处的时刻为t1i(i=0,1,2,…,Imax),其中,Imax为限定时间内,航天器在轨道上运行的最大圈数。通过所求得的t1i可以求得目标卫星在对应时刻的平近点角,进而可得到对应的真近点角f2i。
接下来计算在一定的时间内,每次航天器运行到交线位置上时,目标卫星与交线位置处的真近点角之差,并找出这个差值的最小值fmin以及当差值最小时所对应的时刻tmin为
此时,找出fmin所对应的真近点角,得出目标卫星在它轨道上真近点角为处的地心矢量,进而得到航天器与目标卫星实际上的最近距离为
1.2 天光地影光照条件
为了获得对空间目标的良好观测效果,除了要满足适宜的距离约束以外,良好的光照条件也是必不可少的条件。首先,目标不能处于地球的阴影之中,即要满足地影光照条件约束;其次,观测航天器要在目标的顺光位置进行观测[10]。
1.2.1 地影光照条件约束
光学观测要求目标是被照亮的,不能被地球遮挡住太阳的光线。设地心惯性坐标系中,目标的位置矢量为rT,太阳位置矢量为rsun,RE是地球半径。令
则
依如下判断方法判断空间目标是否处于地影之中:当D>0 时:空间目标在地影之外,满足地影观测条件。当D≤0 时:当≥H2时,目标卫星在地影之外,满足观测条件;当<H2时,目标卫星在地影之内,不满足观测条件。
地影光照条件示意图如图2 所示。
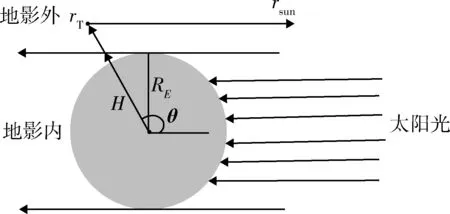
图2 地影光照条件示意图Fig. 2 Schematic diagram of ground shadow illumination conditions
1.2.2 天光光照条件约束
为了保证航天器对目标良好的观测效果,除了目标要处于地影之外,观测器与目标卫星的相对位置也很重要,即观测器要处于顺光位上进行观测。此时观测器-目标卫星-太阳之间的相角αsun小于某个门限值(<90°)。如果相角太大,则说明此时观测卫星是在背光的位置对目标进行观测,此时目标观测面没有光线反射,显得比较暗,观测困难,对于设备的识别能力以及观测精度都有很大的影响,没有办法保证良好的观测效果。
根据上述所说,给出一个合理的可观测时刻观测器-目标卫星-太阳的太阳相角值是十分必要的。太阳角光照条件约束的示意图如图3所示。
图3 太阳角光照条件示意图Fig. 3 schematic diagram of solar angle illumination conditions
已知地心惯性系中卫星到目标的矢量为
因此,太阳相角αsun可由式(17)求得:
1.3 坐标系转换
在进行1.2 里光照条件的判定时,要计算特定时刻的太阳矢量rsun。首先计算出的太阳矢量rsun是在惯性坐标系中的,而进行天光地影光照条件判断的时候,需要将rsun转移到轨道坐标系中。
如图4 所示,地心惯性坐标系Oxyz定义为:原点O位于地球中心,x轴指向春分点,z轴指向地球的北极,y轴与x轴和z轴组成右手坐标系。轨道坐标系(O0x0y0z0)定义为O0原点位于卫星质心,z0轴与卫星的矢径共线并指向地心,x0轴位于轨道平面内,与卫星运动方向相同,y0轴同理与x0轴和z0轴组成右手坐标系[11]。
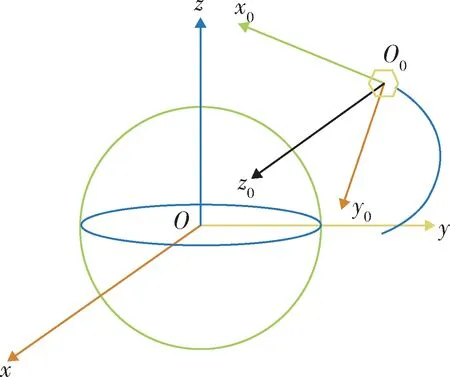
图4 惯性坐标系和轨道坐标系Fig. 4 Inertial and orbital coordinate systems
本文采用间接转换法进行坐标转换,根据卫星轨道根数计算惯性坐标系到轨道坐标系的姿态转换矩阵,从而实现坐标系的转换。该方法的数学表达式如下:
式中:Lx,Lz分别为绕x,z轴旋转的旋转矩阵;u,i和Ω分别为卫星开普勒轨道参数中的纬度幅角、轨道倾角和升交点赤经;L001为坐标轴的反向矩阵,且
1.4 瞬时相对角速度计算
在进行天基观测的时候,观测器与目标卫星在满足了良好光照条件和距离约束的情况下,还需满足相对角速度的约束才能实现良好的观测效果。如果相对角速度过大,超过了某一最大限定值wmax,观测器对于目标卫星将来不及进行调姿观测,同样无法获得良好的观测效果。因此,为了保证良好的观测效果,对于观测器与目标卫星相对角速度的约束也是十分必要的。
如图5 所示,假设观测器在某时刻t相对于地心的位置矢量为r1,目标卫星相对于地心的位置矢量为r2,二者的相对位置矢量为rT1=r2-r1。经过一个极短时间Δt后,在t+ Δt时刻,观测器相对于地心的位置矢量为,目标卫星相对于地心的位置矢量为,二者的相对位置矢量为=。此时视线角变化为
图5 相对角速度计算示意图Fig. 5 Schematic diagram of relative angular velocity calculation
此时可计算出瞬时相对角速度为
当w≤wmax时,可视为观测器在时刻t对目标卫星的观测符合相对角速度约束。
2 粒子群优化算法
为了找到对于多个目标观测距离最小的轨道,就要对观测器轨道的初始状态进行优化,即对观测器轨道的初始六根数进行优化从而确定初始轨道以实现观测器对多个目标卫星的观测。粒子群算法(partical swarm optimization,PSO)是用于解决优化问题的典型算法。基本思想是通过群体中个体之间的协作和信息共享来寻找最优解[12-13]。
在PSO 中,每个优化问题的潜在解都是搜索空间中的一只鸟,抽象为粒子,每个粒子都有一个由目标函数决定的适应值,以及决定它们飞行的方向和距离。PSO 具有实现容易、精度高、收敛快等优点。
2.1 确立目标函数
有m个目标分别在各自的轨道上运行,观测器也在自己的轨道上运行。观测器有自己的最大观测距离Rmax,在一定的时间内,观测器有机会接近目标。当观测器与目标的距离在Rmax之内,且满足1.2中的天光地影条件和1.4 中的相对角速度约束时,即可视为观测成功,而当观测距离越近的时候可视为观测效果最好。设对第1 个目标的观测距离为R1,对第m个目标的观测距离为Rm,目标函数设为
当以上目标函数取得最小值的时候,即可认为实现了对该m个目标的最佳观测。
2.2 算法流程
粒子群算法由随机解出发,通过迭代来寻找最优解。每个粒子在搜索空间中单独搜寻最优解,并将其记为当前个体极值与整个粒子群里的其他粒子共享,找到最优的个体极值作为整个粒子群当前的全局最优解,粒子群中所有粒子根据自己当前的个体极值与当前的全局最优解来调整自己的位置和速度。
首先,要设置粒子的最大速度区间,防止超出最大的空间。位置信息即为整个搜索空间,即为观测器轨道六根数的范围。在任务开始时刻的轨道高度范围设置为目标轨道高度上下最大观测距离的范围内。因目标卫星轨道为近圆轨道,观测器轨道也应为近圆轨道,所以偏心率设置为一个接近于0 的极小数即可。轨道倾角的搜索范围设置为0°~90°。升交点赤经的搜索范围为0°~360°。因轨道为近圆轨道,近地点幅角的意义不是很大,因此设定为0°~360°之内的任意数即可。以上5 个根数可将观测器的轨道确立下来,真近点角的意义是观测器在任务开始时在轨道上的位置,搜索范围也为0°~360°即可。由此可将搜索空间确立下来。在速度区间与搜索空间上随机初始化粒子的速度与位置,设置群体规模为m。
个体极值为每个粒子找到的历史上最优的位置,并从这些个体历史最优解中找到一个全局最优解,并与历史最优解比较,选出最优解作为当前历史最优解[14-16]。
速度与位置的更新公式如下:
式中:w为惯性因子;Ci为加速常数;x1和x2为[0,1]上的随机数;Pid为第i个变量的个体最优解;Pgd表为当前全局最优解;Xid为个体最优解对应的粒子的位置。
当达到最大迭代次Gmax时,停止寻优。算法流程图如图6 所示。
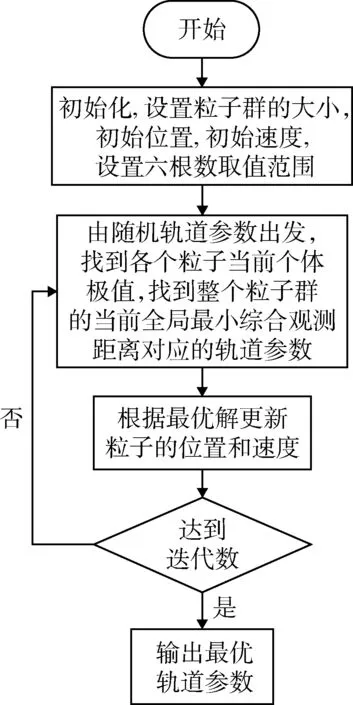
图6 粒子群算法流程图Fig. 6 Flow chart of particle swarm optimization
3 仿真校验
3.1 仿真条件
任务背景是有3 颗低轨卫星在轨飞行,观测器本身在自身轨道上飞行,目标卫星在2022-01-01 T 00:00:00 的轨道参数如表1 所示。观测器的最大观测距离为30 km,最大的观测太阳角为90°,最大相对角速度为10 (°)/s。任务时长为2 个月,要设计一个观测器的观测轨道,使得观测器在轨飞行2 个月的时间里对于3 个目标的综合观测距离最小。太阳矢量的计算以2021-01-01 T 00:00:00 的太阳矢量参数为基准进行递推计算。

表1 目标轨道根数Table 1 Orbit parameters of the target
3.2 仿真结果与分析
设置好粒子群算法参数,惯性因子w设置为0.9,加速常数C1和C2设置为0.5,种群大小设置为50,迭代次数设置为25,在观测器六根数的可取范围内进行寻优。
目标函数为3 颗卫星观测距离的均方根,目标函数随迭代数的变化如图7 所示。
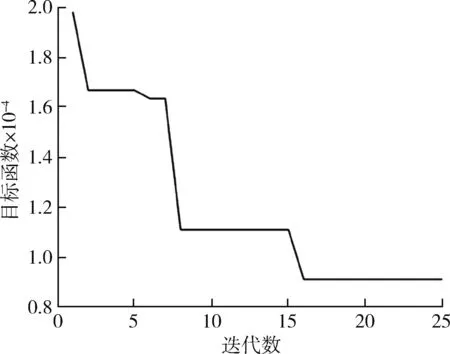
图7 综合距离迭代图Fig. 7 Iterative graph of comprehensive distance
最终优化出的最优观测距离为9.127 5 km,优化出的最优结果所对应的观测器在2022-01-01 T 00:00:00 所对应的轨道根数如表2 所示。
表2 观测器轨道根数Table 2 Orbit alparameters of the observer
达到对3 个目标综合观测距离最小的情况下,对各个目标的具体观测数据如表3 所示。

表3 对各个目标的观测数据Table 3 Observation data of each target
在综合最优观测距离情况下,目标与观测器的轨道位置如图7 所示。
由图7 综合距离变化图可以看出,结果收敛效果良好,最终的综合距离优化结果在10 km 以内,能够在完全不变轨的情况下实现对3 个目标的较近距离观测,且完全满足天光地影观测条件,能够获得较为良好的观测效果。由图8 目标与观测器的轨道位置图可知,对目标的近距离观测只能在两轨道的“十字路口”附近实现,符合实际。
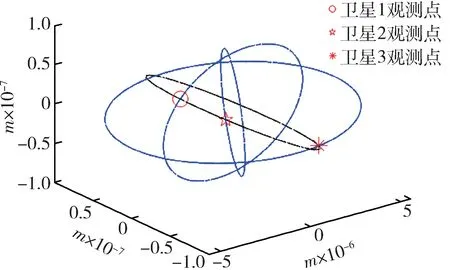
图8 目标与观测器轨道位置图Fig. 8 Orbit diagram of target and observer
由表2 可以得到,最优的观测器轨道高度会比目标的轨道高度偏移一定的距离,这个距离不能太小也不能太大,太小将会导致观测器轨道周期与目标轨道的周期差太小,不容易通过周期差来消除相位之间的差距,太大将会导致观测器对于目标轨道的可视范围变小从而观测成功的机率变小且观测距离变大而导致观测效果的降低。目标的轨道倾角都比较大,所以在极地附近,目标会稍显密集,当观测器轨道倾角比较大的时候,“十字路口”会出现极地附近,更容易观测到目标。
4 结束语
针对空间目标的观测效率低,观测效果不好,燃料不够等问题,本文基于粒子群算法对观测器轨道的六根数进行优化,提出一种多目标掠飞观测接近轨道的设计方法,利用观测器轨道与目标轨道高度之差而产生的周期之差抵消交线处相位与目标相位之差,以实现以消耗时间为代价,在不变轨消耗燃料的情况下实现对多个空间目标的近距离观测。最后利用Matlab 仿真来验证方法的合理性。本文对空间目标观测的研究可以为我国未来空间观测领域研究提供一定的理论基础。