电液位置伺服系统高增益自抗扰控制
2024-03-14神英淇李侃王羽熙司国雷王嘉磊
神英淇,李侃,王羽熙,司国雷,王嘉磊
(四川航天烽火伺服控制技术有限公司,四川成都 611130)
0 前言
电液位置伺服控制系统因具有高功重比、高精度、高频响、高效率、高可靠性等诸多优点[1],而广泛应用于工业数控机床、航空航天、军工武器等领域,尤其在国防领域,其重要性不言而喻。但它也具有系统参数摄动、高阶非线性、难以获得准确系统数学模型、因负载变化引起的未知扰动等众多缺点,使得电液位置伺服系统控制特性变得尤为复杂,从而影响系统的动态及稳态性能、控制精度和抗干扰性能。
为改善上述因素对系统的影响,众多国内外学者将各类先进控制算法应用至电液位置伺服系统中并开展深入研究,如:模糊控制、滑模控制、非线性PID控制、自适应控制、遗传算法等[1-3],有效改善了传统PID控制存在的滞后性,提升了系统控制品质。但电液位置伺服系统是典型的高阶非线性系统,难以获取准确的数学模型,综合考虑由负载变化引起的系统内外扰动、建模误差或未建模动态时,将极大地影响上述先进控制策略对系统的控制效果。另外,若系统未建模动态参数出现较大变化时,采用上述先进控制策略仍然存在不稳定因素,其控制品质将会受到较大影响,甚至导致控制策略失效,使系统无法稳定可靠运行。再者上述控制策略具有数据计算量大、算法复杂等特点,使得控制器设计难度增加,并且对硬件设施要求高,不易实现。随着自抗扰控制策略(ADRC)的提出[4],上述控制策略的不足之处得到了有效的改善。自抗扰控制算法不再依赖准确的系统模型,能够有效抑制因系统负载变化而引起的复杂扰动,对系统状态参数变化能够及时进行补偿,以削弱外部因素引起的不稳定,并且控制过程更为简单,拥有较强的稳定性及可靠性。因此,近年来,自抗扰控制技术逐渐被引入到电液伺服控制领域中,并且取得一定的成果。文献[5]为提高轧机两侧液压位置伺服系统的同步性,设计了自抗扰控制器并取得较好的控制效果。文献[6]针对阀控位置伺服系统,在自抗扰框架下引入加速度前馈,并证明了系统的稳定性。文献[7]采用非线性自抗扰控制方案,验证了控制精度、抗扰性能优于PID控制。文献[8]采用将跟踪误差前馈与扰动估计反馈相分离的三阶线性自抗扰控制器结构,并应用于液压伺服流量控制系统,降低了系统超调。文献[9]针对电液位置伺服系统设计了非线性自抗扰控制器,并进一步引入速度补偿,提高了系统的控制品质。文献[10]针对电液伺服系统中的泵控子系统与阀控子系统,分别设计了位置环及压力环自抗扰控制器,削弱了2个子系统之间的强耦合作用。文献[11]为降低因观测器阶数过高引起的系统响应滞后,将系统位置信息视为已知,设计了降阶自抗扰控制器,有效提高了系统控制性能。
从目前的研究来看,在将自抗扰技术应用至实际的电液位置伺服系统时,众多研究人员所采取的方案基本是根据系统模型阶数设计自抗扰控制器阶数。一般地,将电液位置伺服系统模型取为三阶,则采用自抗扰控制技术,其观测器需再扩张出高于原系统一阶的变量,使得系统存在众多待整定参数、观测器负担重,易导致相位滞后等不利因素。
为此,本文作者以电液位置伺服系统工作特征为切入点,分析阀控系统的输入输出响应特性,获取系统与控制器之间的本质关系。首先,建立系统数学模型,对系统工作特征进行深度分析后,合理地采用自抗扰阶次选取原则,即“最短路径”原则[4],间接降低系统模型阶数,使得所设计自抗扰控制器结构更为简单、易于实现,且减少了待整定参数。其次,在传统扩张状态观测器基础上,进一步观测系统总扰动的微分信号,通过观测系统扰动的变化趋势,产生有效的超前补偿信号,从而提高系统控制性能及抗扰能力。最后,分别从频域及时域的角度进行对比分析。
1 系统数学模型
电液位置伺服系统工作原理如图1所示,因液压缸两腔不对称的结构、系统中伺服阀固有的流量非线性、弹性时变负载等因素的影响,使得系统工作状态极其复杂。对它进行建模以深入分析系统特性。
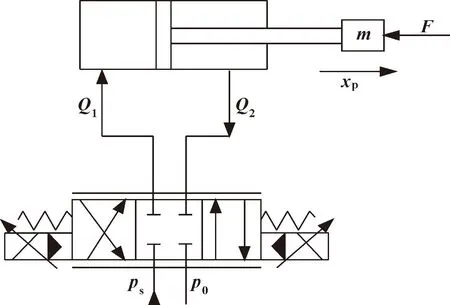
图1 阀控非对称液压缸工作原理
电液位置伺服系统中起到控制作用的元件为伺服阀,其负载流量QL、负载压力pL及阀芯位移xv三者构成函数关系:
QL=f(xv,pL)
(1)
理想情况下可得到伺服阀稳态特性方程为
(2)
式中:QL为负载流量,m3/s;w为伺服阀面积梯度,m;Cd为阀口的流量系数;pL为负载压差,MPa;ps为系统供油压力,MPa;ρ为油液密度,kg/m3;xv为伺服阀位移,m。
对式(2)进行线性化处理有:
QL=KQxv-KcpL
(3)
式中:KQ为伺服阀流量增益;Kc为流量压力放大系数。
进一步,对液压缸建立力平衡方程为
(4)
式中:p1为液压缸无杆腔压力;p2为液压缸有杆腔压力;A1为液压缸无杆腔活塞有效作用面积;A2为液压缸有杆腔活塞有效作用面积;K为负载弹簧刚度;xp为液压缸活塞杆位移;m为液压缸活塞及负载折算到活塞杆上的总质量;Bc为运动黏滞阻尼系数;F为外部负载力及未知扰动力总和。
液压缸流量连续性方程为
(5)
式中:Q1为流入液压缸无杆腔的流量;Q2为液压缸有杆腔流出的流量;Ci为内泄漏系数;β为液压油有效体积弹性模量;V10为液压缸无杆腔初始容积;V20为液压缸有杆腔初始容积。
液压缸两腔关系式为
(6)
式中:V1为液压缸无杆腔容积;V2为液压缸有杆腔容积。
令QL=(Q1+Q2)/2,pL=p1-p2,忽略外泄漏因素,则有:
(7)
结合式(3)(4)(7)可得:
xp(s)=
(8)
式中:Ame=(A1+A2)/2=(1+η)A1/2,为平均活塞面积;η表示两腔面积之比系数;Ve=AeL,为液压缸等效容积均值;Ae为等效面积;L为液压缸行程;Kce=Kc+Ci表示总流量压力系数。进一步可得到:
(9)
其中:V表示液压缸腔总容积。因液压缸活塞运动时,V1不断变化,由式(9)可知,液压缸的等效容积Ve为时变值。同理Ame在上述推导过程中取其变化均值。
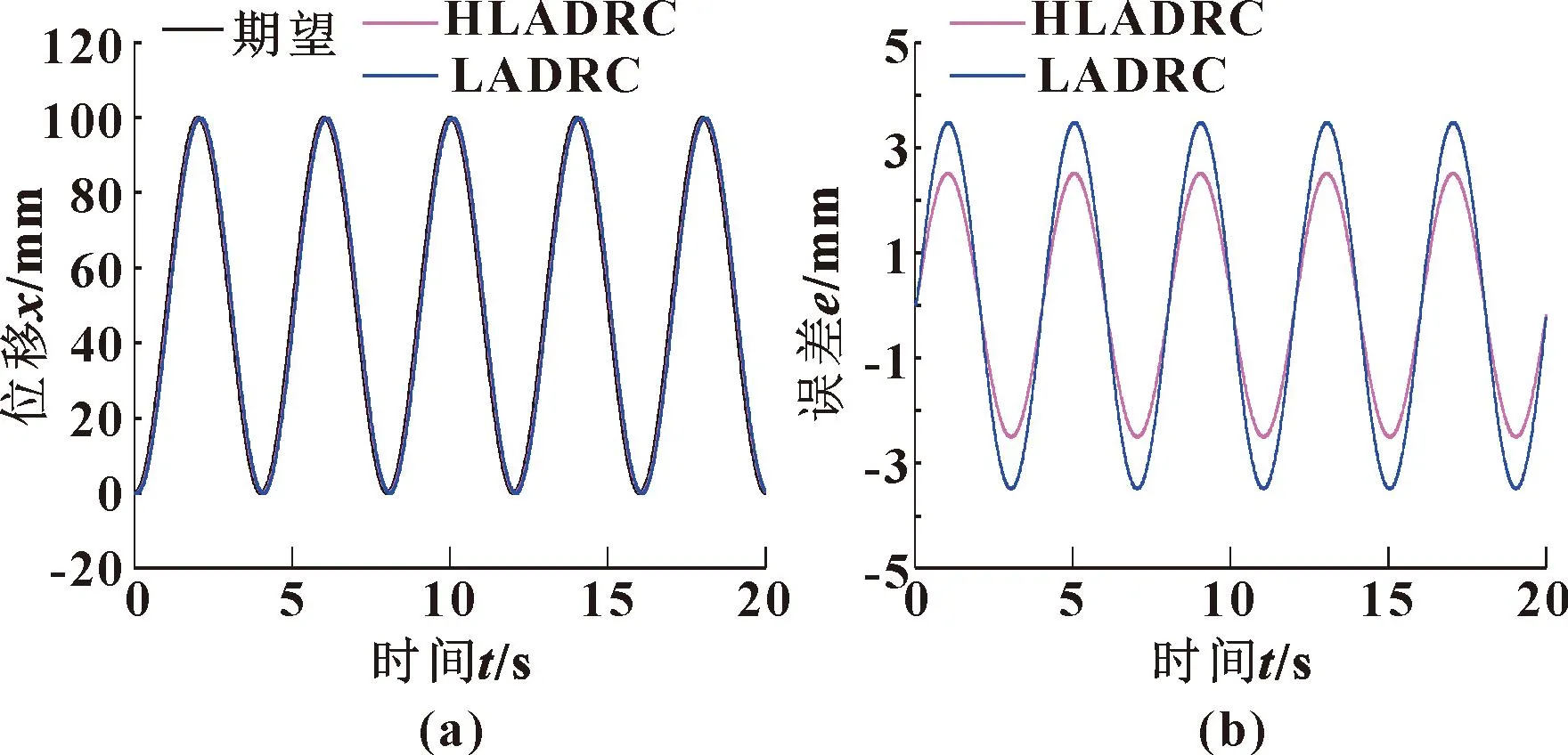
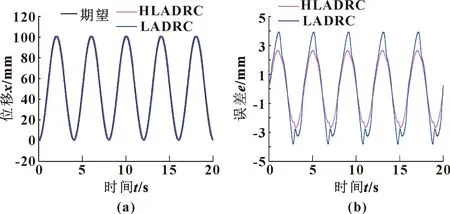
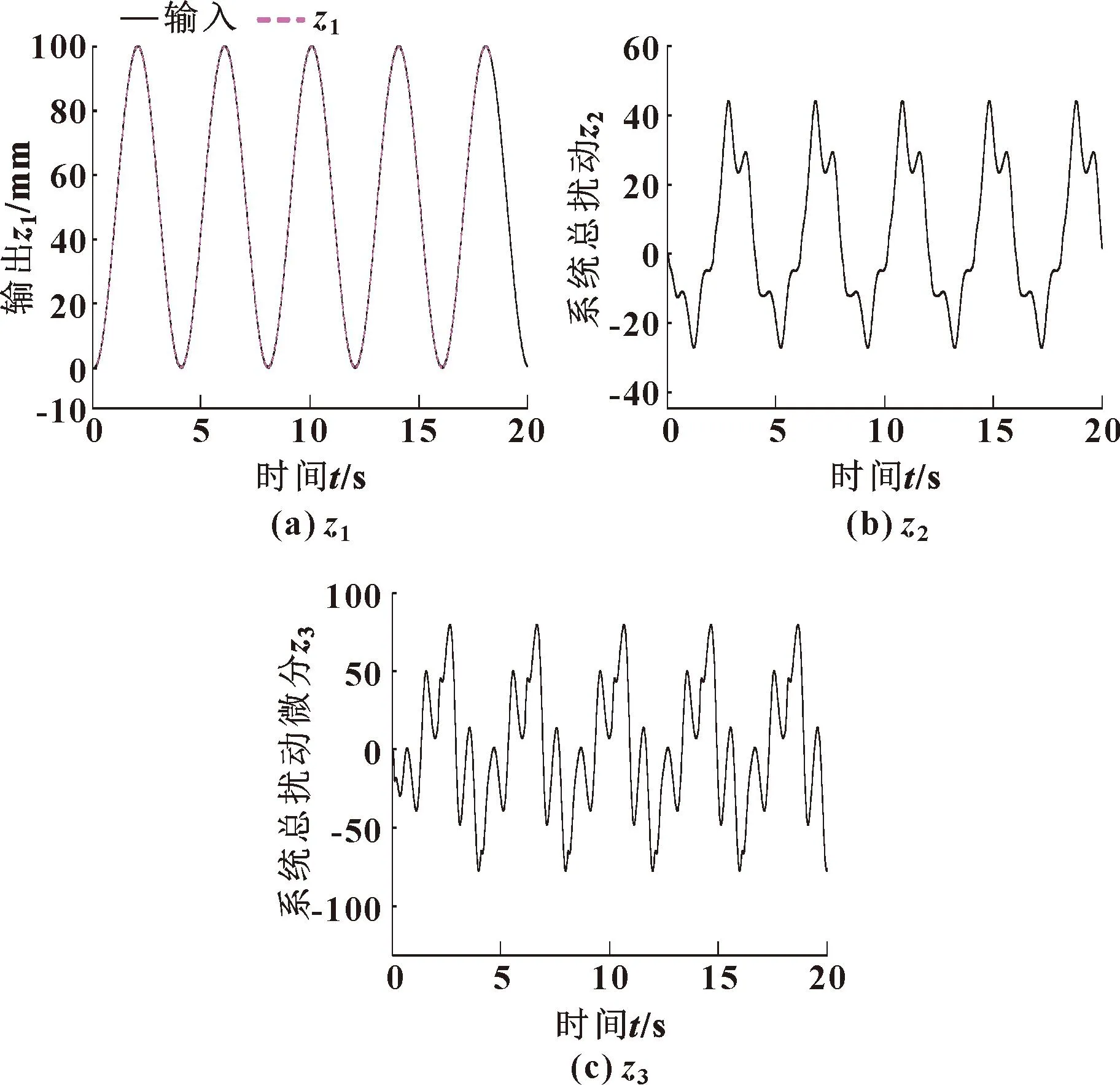
综上可知:在对系统进行建模分析时,进行了较多理想化及等效处理,理论上几乎无法获得其准确的数学模型。基于上述分析,若忽略负载及外力干扰及运动黏滞阻尼系数Bc的影响,又有Kce/Ae< (10) ADRC是以经典PID控制技术为基础,结合现代控制理论,根据系统的能观、能控性建立合理的扩张状态观测器(ESO),完成对系统状态变量的观测,从而实时估计系统的未知扰动,最后通过闭环控制实现对系统扰动的补偿。因此自抗扰控制策略最突出的优点便是不需要建立准确的系统数学模型,仍然能够抑制因未建模动态或建模不准确、参数摄动、外部负载变化引起的复杂扰动。另外,在系统的抗扰性及控制品质上也能够取得较好的效果[4]。近年来,因具有明确的物理意义、参数整定及理论分析更为简单等优点,线性自抗扰控制(LADRC)在工程领域中得到了较多的发展与应用[12]。 自抗扰控制器实际上是将系统转换为积分串联形结构,其典型结构如式(11)所示[13]: y(v)=bu (11) 式中:v表示系统的相对阶次,v的选取也可低于被控对象的阶数[14],但阶次的选取应当尽量具备相应的物理意义。自抗扰核心思想是将系统观测的状态量转换为系统未知状态的估计问题。合理的阶次选取,可有效提高观测效率,降低控制器复杂程度,提升系统的稳定性和控制效果。分析式(10)的结构,系统组成环节为积分环节和二阶振荡环节,若此时的系统具有泄漏系数小、动态响应快等特点,则积分环节可视为主导环节,即对系统控制起主导作用[15]。特别地,当系统中的伺服阀频响远大于液压缸频响时,可将伺服阀看作比例环节[16],故结合式(8),从控制量到输出可绘制如图2所示的结构。 图2 电液位置伺服系统结构 图2中系统从给定信号到输出位移信号的通道仅包含一个积分环节,根据“最短路径”原则选取自抗扰控制器阶次的方法[4],一阶自抗扰控制器符合此系统。另外将此系统模型简化为一阶模型,也与文献[13]所述观点一致,即根据系统物理意义选取阶次,使其概念更直观。此系统的物理意义可做如下解释:在电液位置伺服系统中,系统给出控制量u经过伺服控制器驱动阀芯位移,改变出口流量大小进而推动液压缸行程,流量与活塞的有效面积之比为运动速度,速度信号通过积分环节即为期望位移,可根据速度计算液压缸实际位置。 进一步从频域角度分析系统的特性,可将式(10)所表示的系统以动态模型的形式改写成如下表达方式: (12) 式中:w为未知扰动及未建模部分;η1、η2为系统不确定参数。将系统的高阶导数项、模型的不确定部分、因负载变化引起的外部扰动均视为总扰动的一部分,则系统总扰动可表示为 (13) 若选取状态变量x1=xp,x2=f,若f有界且可导,h=f,则可得到系统的状态方程: (14) 根据式(14)设计线性扩张状态观测器(Linear Extended State Observer,LESO)的形式为 (15) 采取如下线性反馈控制规律(LSEF): (16) 扰动补偿为 (17) 对LESO相关参数采用极点配置法[17],可得到: (18) 整理式(14)(15)(18)可得到基于模型降阶的LESO传递函数: (19) 基于上述分析,绘制基于模型降阶LADRC控制结构如图3所示,将系统积分环节视为主导环节,则将系统模型改为一阶模型,简化了控制器结构,减少了待整定参数,使系统控制更清晰简洁。 图3 基于模型降阶LADRC控制结构 整理式(14)可得: (20) 根据式(19)(20)可得到传统LESO扰动观测传递函数: (21) 分析式(21)的幅频特性可知,增大观测器带宽ω0值,一定程度上可提高LESO对总和扰动的动态观测性能,但在实际工程中,考虑到传感器的精度及观测噪声,带宽过高会使得噪声放大明显,不利于系统控制。 上述LADRC控制结构仍存在对初始误差敏感[12]、易产生超调、观测器带宽受观测噪声限制等问题。为了提高对系统总扰动的观测能力,本文作者对观测器结构及控制规律进行改进,采用高增益线性扩张状态观测器(HLESO),即将系统总扰动的微分作为新一阶状态变量,对总扰动微分进行实时观测,根据其变化趋势,产生预判系统扰动的早期修正信号,用以提高动态观测能力并间接增大系统带宽,进而提升系统动态响应速度,改善控制效果。 采用HLADRC算法下系统控制结构如图4所示,所设计高增益控制规律(HLESF)形式如下: (22) 图4 基于模型降阶HLADRC控制结构 进一步,所设计HLESO结构为 (23) 仍采用极点法配置观测器系数: (24) 根据式(23)(24)推导出HLESO传递函数: (25) 同理,可求得HLESO观测扰动传递函数: (26) 对比式(21)(26)可发现HLESO仅增加了一对零极点,且该系数可调,取相同带宽分别绘制两者幅频特性曲线如图5所示,对于系统的中低频段,采用HLESO时,相位滞后得到明显改善,系统带宽也有所增加,且两者在高频段位基本一致。 图5 LESO与HLESO扰动观测传递函数频域特性曲线 分析位置信息观测量y的噪声δn在系统中的影响,由式(25)可知HLESO的观测噪声传递函数: (27) 分别绘制其频率特性曲线如图6所示,可知:在相同带宽条件下,中低频段两者对噪声抑制能力基本一致,但是传统LESO相位滞后性远高于HLESO,因此采用HLESO能够显著提高系统响应速度。虽高频段HLESO对噪声具有略微放大效应,但就此研究系统而言,其液压缸活塞动作频率较低,因此低频段控制品质更为重要。 图6 LESO与HLESO观测噪声频域特性曲线 同理,由式(25)可得到HLESO输入端扰动δc的传递函数[11,17]: (28) 进一步,分别绘制采用2种算法的输入端扰动频域特性曲线如图7所示,相比于HLESO,传统LESO存在严重的滞后性,并且对于中低频段而言,HLESO增益较小,即对扰动的抑制能力很强。因此,对系统进行控制时,在抗扰性能及响应速度方面,尤其针对电液位置伺服系统,HLESO的优势更明显。 图7 LESO与HLESO输入端扰动频域特性曲线 为进一步验证采用传统LADRC和HLADRC两种控制策略效果,分别在MATLAB/Simulink与AMESim软件中搭建联合仿真模型,所设置系统模型参数如表1所示。 表1 仿真参数 为验证所采用控制策略阶跃响应特性,给定系统所输入的阶跃信号幅值设置为100 mm,且控制器取相同参数,得到2种控制算法输出结果如图8所示。传统LADRC存在较严重超调现象,其超调量约为4%,达到稳态所需时间约为0.65 s;当采用HLADRC控制策略时,系统阶跃响应超调量仅为0.6%,几乎可忽略,超调量降低85%,达到稳态仅需要0.34 s,系统响应速度提高约47.7%。 图8 系统阶跃响应对比曲线 进一步,为对比2种控制策略位置跟随性效果,系统指令信号设定为r=100×sin(0.5πt)的正弦信号,系统响应结果如图9(a)所示,其跟随误差如图9(b)所示,采用HLADRC时系统的跟随误差降低了约26.4%。观测器观测曲线z1、z2、z3的输出结果如图10所示。 图9 无扰动位置跟踪曲线(a)和误差对比曲线(b) 最后,为验证所采用控制策略的抗扰性能,在仿真模型负载端加入幅值为8 000 N、频率为1 Hz的扰动信号,其位置跟随响应及误差结果分别如图11所示。加入干扰信号后,传统LADRC控制下系统跟随误差增大约11.4%,而HLADRC的误差值几乎未增加,进一步验证其抗扰性能得到大幅提升。系统加入干扰信号后观测器结果分别如图12所示。 图11 加入干扰信号后位置跟踪曲线(a)和误差对比曲线(b) 图12 加入干扰信号后HLADRC观测器输出曲线 文中对电液位置伺服系统采用LADRC算法进行了研究,针对观测器阶数过高、观测信息相位滞后、易产生超调等问题,提出了一种高增益自抗扰控制方案。以系统的输入输出特性为切入点,对系统模型进行降阶处理,使控制器结构简化,待整定参数减少。进一步对系统总扰动的微分信号进行观测,根据系统总扰动的变化趋势,提前进行修正补偿,从而提高系统响应速度和降低系统超调,并在一定程度上提高了系统抗干扰性能。理论分析和仿真验证结果表明:采用HLADRC算法的电液位置伺服系统的控制性能优于传统LADRC控制。
2 控制策略研究
2.1 基于模型降阶LADRC控制


2.2 基于模型降阶高增益LADRC控制




3 仿真研究


4 结论
