泵阀复合式电液负载模拟器流量压力协调控制
2024-03-14李标兵汪成文赵二辉
李标兵,汪成文,2,赵二辉
(1.太原理工大学机械与运载工程学院,山西太原 030024;2.太原理工大学新型传感器与智能控制教育部重点实验室,山西太原 030024)
0 前言
负载模拟器是半实物仿真中的重要实验设备,一般用于替代破坏性实物测试[1],其对缩短研制周期、提升产品可靠性和节约研制经费具有重要意义。常见的负载模拟器根据结构可分为三大类:电液式负载模拟器[2]、电动式负载模拟器[3]和机械式负载模拟器[4]。其中,电动式与机械式负载模拟器进行大载荷模拟时需要依赖复杂的结构,难以达到航空航天设备、运载设备动态加载测试时所要求的高频带和强输出能力;而电液负载模拟器工作频带高、输出能力强,广泛应用于航空航天设备、运载设备的动态加载测试,因此对电液负载模拟器进行研究具有重要意义。电液式负载模拟器是典型的位置扰动型电液力(矩)伺服系统[5]:在动态加载过程中,承载对象的主动运动会对负载模拟器带来干扰(多余力)。这种干扰具有强度大、持续存在且随舵机的运动不断变化的特点[6],严重影响了电液式负载模拟器的加载性能。因此,消除加载时舵机主动运动带来的干扰是负载模拟领域研究的关键[7-9]。近年来,国内外学者提出多种用于提高电液负载模拟器加载精度的方法,大致可分为两大类:(1)改进负载模拟器结构;(2)控制补偿。改进结构的方法是通过增大系统的滤波作用来抑制多余力影响程度,具体包括:采用蓄能器矫正、缓冲弹簧矫正以及使用复合缓冲缸[10]。结构改进的方法在克服多余力方面有一定的效果,但由于安装精度高等原因,实际工程应用非常困难[11]。控制补偿的本质是将承载对象的主动运动作为干扰处理,根据其运动状态补偿其引起的多余力矩,具体控制方法有:流量补偿控制[12]、速度同步控制[13]等。虽然控制补偿法可以削减承载件主动运动带来的干扰,但加载精度受到加载结构的制约,导致加载效果提升有限。为了从加载结构上解耦承载对象主动运动干扰从而提高加载精度,权龙等人[14]提出将泵阀复合系统运用于负载模拟的方案,通过对泵和阀的独立协调控制实现对加载作动器速度和输出力的双自由度伺服控制。但此方案中的控制方法未解决泵控子系统与阀控子系统之间的干涉问题,导致实际的加载效果并不理想。
在泵阀复合式电液负载模拟器中,为了解决泵、阀子系统之间的干涉问题,实现负载模拟器的高精度加载,本文作者提出一种流量压力协调控制电液负载的模拟方法。首先建立电液负载模拟系统数学模型;然后基于反步滑模控制[15-16]方法设计了协调泵、阀子系统输出的控制策略;最后通过AMESim-MATLAB/Simulink联合仿真。
1 系统组成
文中研究的泵阀复合式电液负载模拟器系统组成如图1所示。泵阀复合式电液负载模拟器的具体组成包括:加载缸,安全阀1、2,单向阀1、2,双向定量泵,伺服电机,伺服阀1,定量泵1,溢流阀1,油箱1;其中运用的传感器有位移传感器1、2,速度传感器1、2,力传感器,压力传感器1、2。加载缸的流量和压力由泵阀并联系统调控。舵机是由舵机液压缸、伺服阀2、溢流阀2、定量泵2、油箱2组成的阀控缸位置伺服系统。
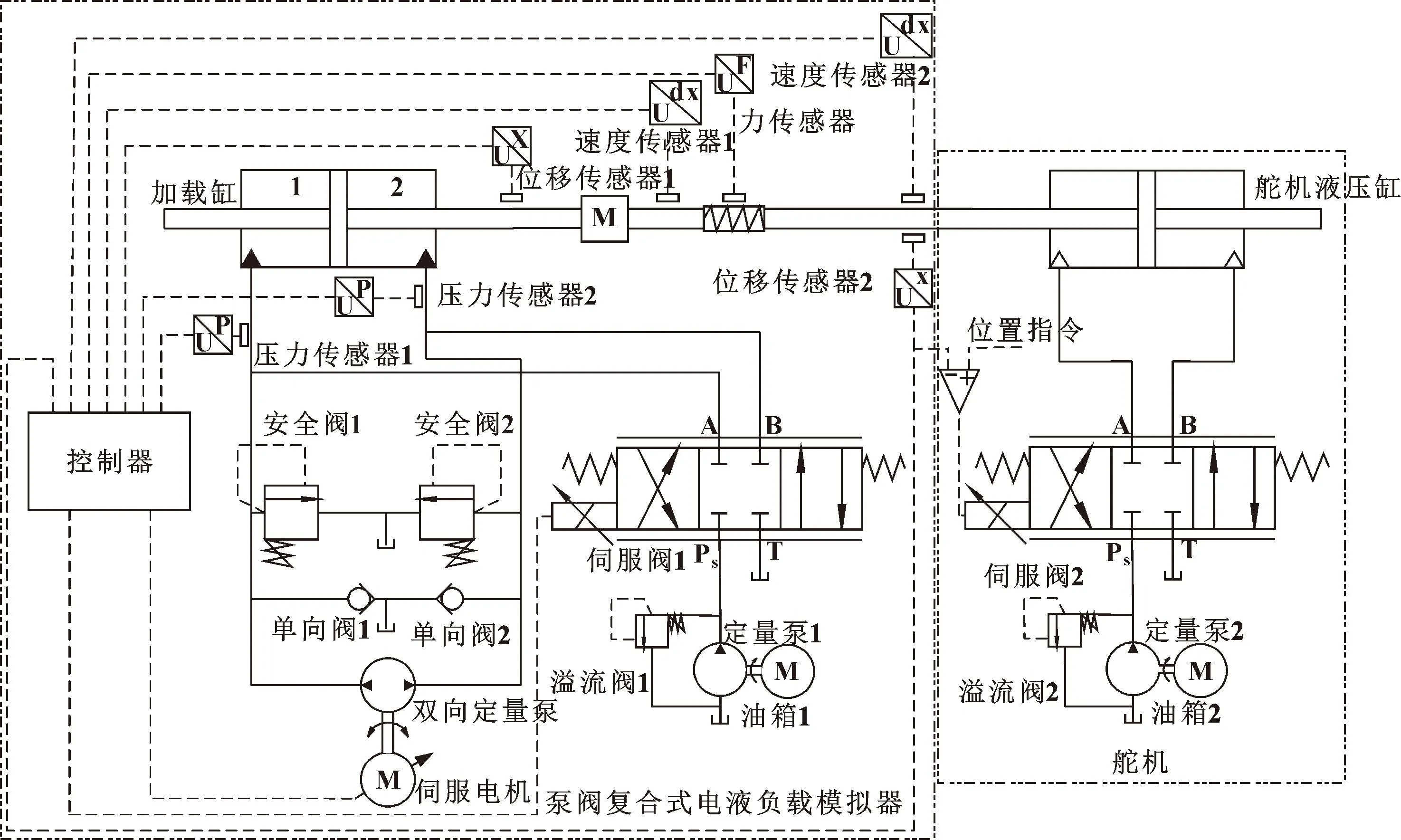
图1 泵阀复合式电液负载模拟器组成
工作时,舵机在其位置闭环控制下主动运动。泵阀复合式电液负载模拟器在舵机主动运动的过程中进行力指令的动态加载:控制器根据力指令和传感器的反馈信号分别对双向定量泵和伺服阀1进行控制,保证加载缸对力指令的高精度跟踪。在加载过程中,泵控子系统提供动态加载时所需的大部分流量,阀控子系统控制加载缸两腔压力。
2 数学模型
文中规定:加载液压缸活塞向右运动为正,向左运动为负。数学模型的建立推导基于以下假设[17]:使用的伺服阀为匹配对称的理想零开口阀;忽略滑阀与加载液压缸的外泄漏;加载缸及连轴部分质量远大于力传感器处弹簧的质量。
由于加载缸及连轴部分质量远大于力传感器处弹簧的质量,所以把力传感器看作一轻弹簧,由胡克定律得:
Fc=Ke·(xl-xm)
(1)
式中:Fc为加载缸与舵机液压缸之间的作用力;Ke为力传感器的刚度;xl为加载缸活塞的位移;xm为舵机活塞的位移。
以加载液压缸活塞为对象,受力分析得:
(2)

加载缸两腔的压力动态为
(3)
式中:V1、V2分别为加载液压缸左右腔以及连接管道的容积;βe为液压油的体积弹性模量;Q1、Q2分别为流入加载液压缸两腔的流量;Ci为液压缸的内泄漏系数。
定义负载压力:pL=p1-p2;式(3)则可整理为
(4)
(5)
定义Qp1、Qp2分别为泵控子系统提供给1、2腔的流量;Qv1、Qv2分别为阀控子系统提供给1、2腔的流量,则流入加载液压缸1、2腔的流量Q1、Q2有:
(6)
基于职能分工的思想,在动态加载过程中解耦舵机运动干扰所需要的流量主要由泵控子系统提供,因此,泵控子系统流量则可表示为
(7)

将式(7)代入式(6)得:
(8)
定义双向定量泵处的流量Qp=(Qp1+Qp2)/2,由于式(7)已经考虑泄漏的影响,双向定量泵处的流量可表示为
Qp=Dpω
(9)
式中:Dp为双向定量泵的排量;ω为双向定量泵和电机的转速。
伺服电机转速为
ω=kpup
(10)
式中:kp为伺服电机速度增益系数;up为伺服电机的控制电压输入。
联立式(7)(9)(10)得:
(11)
(12)

由于伺服阀的频率响应远高于加载作动器的工作频率,因而可将伺服阀的动态过程简化为比例环节[18]:
xv=kv·uv
(13)
式中:kv为伺服阀的增益;uv为伺服阀的输入信号。
定义函数R1、R2:
(14)
令γ=kqkv,联立式(9)(10)(11)得:
(15)
将式(8)(15)代入式(5)中得阀控子系统状态空间方程:
(16)

3 控制器的设计
由文献[19]中对多余力来源的分析可知,当处于职能分工状态下的泵控子系统可以解耦动态加载的流量时,舵机主动运动干扰所产生的影响将大大降低。但并联状态下的泵、阀子系统间存在相互干涉的问题,子系统间的干涉将影响加载缸力的跟踪精度。因此,设计控制器时需要保证子系统间的协调性。为了实现子系统间职能分工的目标,并且避免子系统之间的干涉,文中设计了流量压力协调控制器,其原理框图如图2所示。其中,反步控制器基于加载缸输出力Fc与力指令Fd的跟踪误差、舵机液压缸与加载缸的状态反馈信息,并运用反步控制的设计方法,实时为加载液压缸生成期望速度x2d。将规划得到的速度指令x2d作为泵控子系统的指令,并利用PID控制器对泵控子系统进行速度闭环控制,则由舵机运动产生的强迫流量将主要由泵控子系统提供。同时,再基于泵控子系统跟踪误差,通过反步滑模的设计方法为阀控子系统设计控制输入uv。加载伺服阀在uv的控制下,调节加载液压缸两腔的压力,减小加载误差。
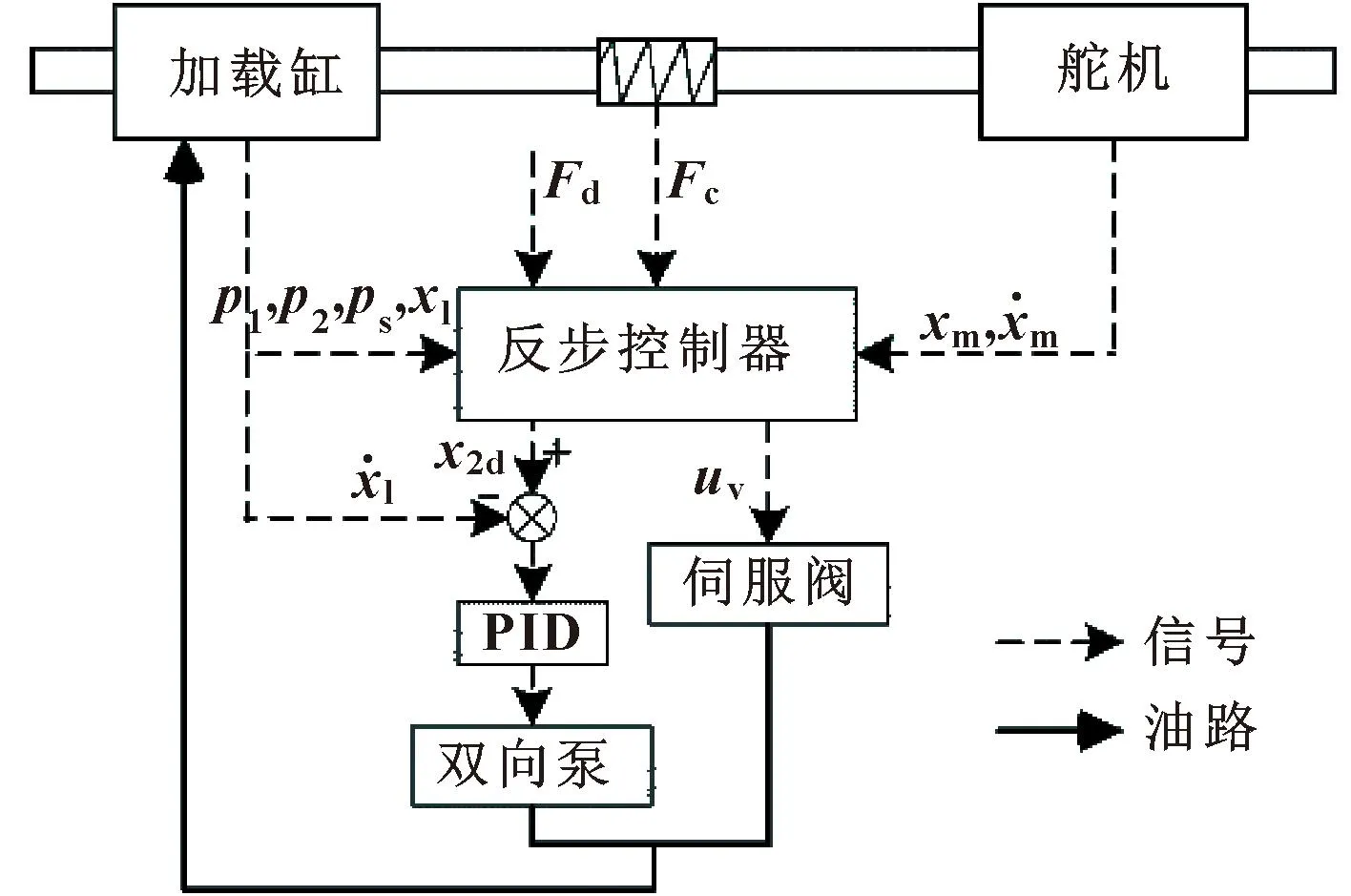
图2 流量压力协调控制框图
由胡克定律得,加载系统执行载荷谱指令时的位置指令为
x1d=Fd/Ke+xm
(17)
式中:Fd为系统跟踪的力指令。

(18)
(19)
将速度控制指令x2d作为泵控子系统的跟踪指令。从加载液压缸处取速度反馈信号,运用PID控制器实现对泵控子系统的速度闭环控制。调节PID控制器比例增益系数Kp、积分增益系数Ki,得出泵的输入up:
(20)
定义速度跟踪误差e2=x2-x2d,对时间求导得:
(21)
此时式(18)化简为
(22)
(23)

(24)
定义e3=x3-x3d,定义滑膜面S为
S=e3
(25)
S对时间求导得:
(26)
定义Lyapunov函数Vc=Vb+1/2S2,对时间求导得:
(27)

(28)
其中:η≥Dmax。
稳定性验证:将uv代入式(27)可得:
(29)
由此证明,控制器具有稳定性。
4 仿真研究
为了验证泵阀复合式电液负载模拟器在流量压力协调控制器下的加载性能,通过AMESim-MATLAB/Simulink进行联合仿真分析。联合仿真原理如图3所示。泵阀复合式电液负载模拟器的加载系统与承载舵机的运动系统在AMESim软件中搭建,控制算法由软件MATLAB/Simulink实现。为了更加真实地模拟实验环境,联合仿真模型还考虑了静摩擦、黏性摩擦、库仑摩擦、液压系统泄漏等因素对系统的影响。

图3 联合仿真原理
在系统联合仿真中,设置输出力指令Fd=8 000sin(πt) N,舵机系统位移指令xd=0.003× sin(2πft) m,测试负载模拟器在舵机的运动频率f为0.1、1、5 Hz时的加载性能。联合仿真所设置的主要参数如表1所示。仿真所用的采样间隔设置为0.001 s。

表1 泵阀复合式电液负载模拟器主要仿真参数
PID控制器因鲁棒性、自适应性、结构简单等优点而被广泛应用于各类跟踪控制之中。为了更好地验证上述的流量压力协调控制电液负载模拟方法用于负载模拟器的可行性,现将PID控制器控制单个伺服阀的加载方式(简称单阀)与PID控制器控制单个双向定量泵的加载方式(简称单泵)设置为对照;仿真时,各组所使用的泵、阀的参数均不变。
为了对比3种加载方式下的力指令跟踪精度,将各频率下3种加载方式的输出力跟踪情况进行对比分析,如图4所示。为了直观地比较3种加载方式的优劣,将各频率下3种加载方式的输出力跟踪误差进行对比分析,如图5所示。

图4 输出力跟踪情况
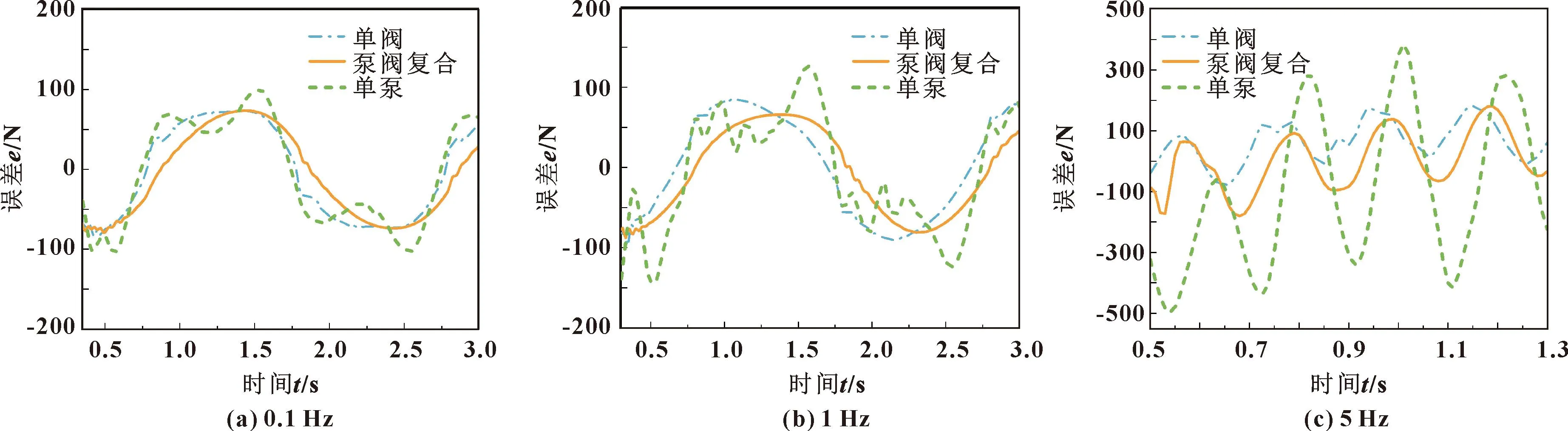
图5 力跟踪误差
由图4、5可知:在舵机运动频率为0.1、1 Hz时,在单阀与泵阀复合的加载方式下具有较好的力跟踪效果,单泵的加载方式跟踪效果稍差;随着频率的增大,单泵式加载精度逐渐降低;在舵机高频运动时,加载精度较差。受泵控子系统在高频段输出效果变差的影响,在泵阀复合的加载方式下力跟踪精度略微下降。
为定量分析3类加载方式下的力跟踪精度,定义稳态误差的均方根值:
(30)
如表2所示,通过分析3类加载方式各频率下稳态误差均方根值可得:在流量压力协调控制策略下的泵阀复合式电液负载模拟器加载精度最高,单阀式加载方式次之,单泵式加载方式最差;随着舵机运动频率的升高,3种加载方式下的力跟踪误差均逐渐增大,其中单泵式加载方式在高频段跟踪效果显著变差;当舵机运动在中、低频段时,舵机的主动运动带来的干扰较小,泵阀复合式加载方式与单阀式加载方式精度相近,随着舵机运动频率的增大,二者误差差距逐渐增大;当舵机运动在高频段时,泵阀复合式加载误差比单阀式加载误差降低23.3%;通过与单泵式加载方式对比可知,随着舵机主动运动频率的增大,泵控子系统的跟踪效果随之变差,而基于流量压力协调控制下的泵阀复合系统具有较高的加载精度,证明系统实现了阀控系统对泵控系统跟踪误差进行补偿的目标。

表2 三类加载方式的稳态误差均方根值
为了验证流量压力协调控制策略下的泵、阀子系统是否实现了职能分工的目标,对动态加载过程中泵控子系统提供的流量(简称泵流量)与阀控子系统提供的流量(简称阀流量)进行分析,如图6所示。

图6 泵、阀控子系统流量
为了定量分析泵控子系统和阀控子系统在动态加载时为所需流量做出的贡献,定义QRMS为流量的均方根值:
(31)
通过分析图6和表3可得:当舵机运动于各个频段时,流量压力协调控制策略下的泵控子系统提供的流量占总流量的91.6%、91.4%和90.6%;在泵阀复合式电液负载模拟器对力指令进行跟踪时,泵控子系统提供了动态加载时的绝大部分流量,即实现了职能分工的设计目标。单阀与泵阀复合式加载方案都具有较高的加载精度,为了进一步探究泵阀复合式加载方案的优势,分析单阀与泵阀复合式加载方案的能耗。由于仿真分析前规定在比较各加载方式的过程中,泵、阀等参数均不改变,根据文献[20]的液压伺服系统设计规则计算阀控系统的理论功率Pv。根据设计方法选定阀控子系统中液压泵的最大工作压力pp和最大工作流量qp。将液压泵处的总功率作为阀控系统的理论功率,即Pv=pp·qp。
(32)

表3 三类加载方式的流量均方根
式中:pmax表示液压缸的最大工作压力;∑Δp表示从液压泵出口到液压缸或液压马达入口之间总的管路损失;K表示系统泄漏系数,文中取K=1.3;∑qmax表示各液压缸同时动作时的最大总流量,文中∑qmax取各加载方式下伺服阀稳态加载时的最大值Qvmax。根据力指令Fd的最大值取pp=2.0×107Pa。
为了比较单阀和泵阀复合式加载方式下的能耗,定义平均总功率Psum:
(33)
式中:Wp为t时间内双向泵消耗的总能量。
分析表4可得:当舵机运动频率为0.1、1、5 Hz时,泵阀复合式加载方式的Psum分别比单阀式加载方式的Psum减少52.6%、52.2%和54.6%,泵阀复合式加载方式下的平均功率均显著下降。在文中所提控制策略控制下,泵阀复合式加载方案下的加载精度高于单阀式加载方案,能耗远低于单阀式加载方案。在大流量大负载长时间运转的工况下,流量压力协调控制下的泵阀复合式电液负载模拟器不但能精准地完成加载任务,并且可以节约大量的能量消耗。由于流经阀控子系统的流量较小,使用规格更小的伺服阀即可满足加载需要;由于小规格的伺服阀控制特性更佳,泵阀复合式电液负载模拟器的加载精度可进一步提高。
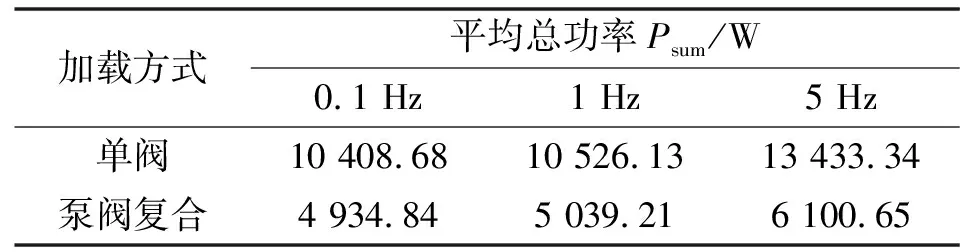
表4 运行100 s下的平均总功率
5 结论
(1)泵阀复合式电液负载模拟器具有较高的加载精度,可以对载荷力指令进行精准跟踪。
(2)泵阀复合式电液负载模拟器在文中提出的流量压力协调控制策略下,实现了泵、阀子系统职能分工的目标,解决了并联子系统间的干涉问题。
(3)与单阀式电液负载模拟器相比,泵阀复合式电液负载模拟器工作所需的平均功率大大降低。
