伺服系统状态反馈切换控制策略研究
2024-03-14杨衡张倩王群京符梦虎刘超辉宋金星
杨衡,张倩,王群京 ,符梦虎 ,刘超辉,宋金星
(1.安徽大学电气工程与自动化学院,安徽合肥 230601;2.安徽大学高节能电机及控制技术国家地方联合工程实验室,安徽合肥 230601;3.安徽大学教育部电能质量工程研究中心,安徽合肥 230601)
0 前言
机电伺服系统广泛应用于航空系统[1]、数控机床[2]、机器人[3]等领域,其控制性能直接影响装备的整体指标。伺服系统的动态特性在某些特定的工作状态下几乎是典型的线性,但是由于受温漂、磁饱和程度变化以及非线性扰动等因素的影响,系统存在参数不确定性[4],这种不确定性会使得系统特性跟随工况的变化而变化。
传统的伺服转台建模通常为传递函数模型[5]、微分方程模型[6]和状态空间模型[7]等形式。这种基于线性模型设计的控制方法应用在含参数不确定性的实际系统中时,控制效果会大打折扣。文献[8]建立磁悬浮直线伺服系统的状态空间方程,基于线性矩阵不等式理论设计了非脆弱H∞控制器抑制电机参数变化。文献[9]对具有参数不确定性的电液伺服单阀控缸建立精确的状态空间方程模型,并提出了3种不同的单缸控制策略,分别为非线性补偿的PID控制、前馈控制加PID控制和改进自适应律的自适应鲁棒控制。文献[10]针对参数不确定性,通过一阶低通滤波运算和引入辅助中间变量,构造的参数自适应律中引入了跟踪误差项、系统状态误差项和参数估计误差有关的切换项。上述研究都显著改善了系统的控制性能,但未在建模中提出系统性的方法应对参数不确定性。针对此类问题,文中在伺服系统的建模中引入切换系统理论,建立其切换模型。
切换系统是由多个子系统和一个整体的切换规则组成,通常是由一个状态切换到另一个状态[11]。含有参数不确定性的伺服系统,其频域特性随转速变化而变化,这一特征符合切换系统。文献[12]为了提高航空发动机的调速性能,提出了一种基于切换模型的事件触发切换控制策略,各子系统控制器设计采用精确反馈线性化技术。文献[13]中针对直接驱动伺服控制系统存在的外部干扰,建立了系统的误差切换模型,提出了一种基于干扰观测器的鲁棒滑模切换控制器,该方法可以有效缓解切换系统的颤振,降低切换增益,但是实际应用时需要仔细调整切换参数才可以达到理想效果。为了解决切换系统的抖振问题,切换系统的平坦度[14-16]已经引起了广泛研究。文献[15]给出了输出平坦度的代数条件,并根据这个条件提出了一种计算输出平坦度的算法。
本文作者首先根据伺服系统的非线性Bode图,以速度值为切换信号,划分为低、中、高三个速度区域,建立其速度切换模型。其次,考虑控制器可实现性,将子系统设计为三阶的状态空间方程,并在模拟退火算法中引进平坦性算法对未知参数进行辨识。然后,针对建立的速度切换模型,设计了基于观测器的子系统状态反馈控制器,进行稳定性分析,保证了闭环系统的渐近稳定性。最后,采用伺服转台进行仿真与实验,验证了文中所提建模方法和控制策略的有效性。
1 伺服转台的切换模型
1.1 一般离散切换模型
机电伺服系统的线性离散切换模型可描述为
x(k+1)=Aσ(k)x(k)+Bσ(k)u(k)
y(k)=Cσ(k)x(k)
(1)
式中:u(k)、y(k)分别为输入量和输出量;x(k)为状态;Aσ(k)、Bσ(k)和Cσ(k)分别为系统的状态、输入和输出矩阵;k∈N表示离散时间,σ(k)则表示时间为k时由切换信号切换到的模式。
使用正弦扫频信号u=γsin(ω)观察系统的频域特性,得到的Bode图如图1所示。可知:转速逐渐增大时,Bode图的曲线谐振峰值逐渐减小,且其转折频率也逐渐变大。根据Bode图所示的频域特性,将速度区域划分为低、中、高3个区域,分别对应0~1、1~5、5~10 rad/s。

图1 不同转速下的Bode图
1.2 子系统模型
伺服系统的结构框图如图2所示,它由驱动器、伺服电机、传感器和机械传动机构组成。
图2 伺服系统结构框图
根据上述的系统框架图,建立子系统的状态空间方程模型,系统的动态矩阵、输入矩阵和输出矩阵如下所示:
(2)
模型参数如表1所示。

表1 伺服系统参数
由于系统存在参数不确定性,故将参数Bm、BL、Jm、JL和Ts设定为未知。根据系统不同转速区域的离线数据,将未知参数当作变量进行辨识。
根据辨识结果得到子系统的状态空间方程,将3个区域的子系统模型组合,以速度值v作为切换信号,即得到最终模型S。
(3)
1.3 切换系统的参数辨识
由文献[15]可知,系统的输入及状态可以表达为输出y(k)向前或向后移动有限r步的函数,线性离散切换系统式(1)的输出就是平坦的。由输入序列u(k∶k+r)和模式序列σ(k∶k+r)驱动切换系统得到输出序列为

(4)
(5)
Mσ(k∶k)=Dσ(k)
(6)
(7)
其中
(8)
式中:(Mσ(k∶k+r))†是Mσ(k∶k+r)的穆尔-彭罗斯广义逆矩阵。如果存在非负整数K,使得所有模式序列及所有k≥0的矩阵计算满足式(9),则系统输出是平坦的。
Pσ(k+K-1:k+K-1+r)Pσ(k+K-2:k+K-2+r)…Pσ(k∶k+r)=0
(9)
其中,不同的模式序列可能导致相同的矩阵Pσ(k∶k+r)。为了降低计算量,采用Q代表不同Pσ(k∶k+r)的集合,Q′σ(k)则表示其中的一个元素。因此,对于受约束的切换系统S(Q),可以得到式(10):
Qσ′(k+K-1)Qσ′(k+K-2)…Qσ′(k)=0
(10)
(11)
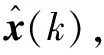
为了简化计算,提出最终算法[15](如式(11)所示),其算法流程如图3所示。
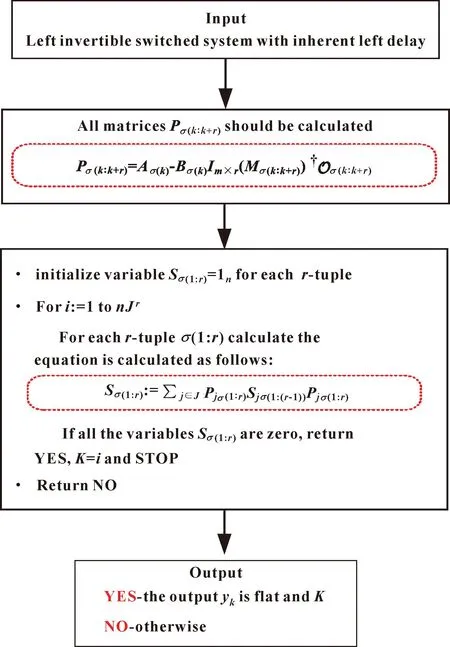
图3 算法流程
在模拟退火算法中,引入算法式(11),其适应度函数如下:
f1=min|Sσ(1∶r)|
(12)
2 控制器设计
2.1 系统切换控制器
利用得到的具有较高精度的切换模型设计基于状态观测器的反馈控制器。所提控制策略的框图如图4所示。
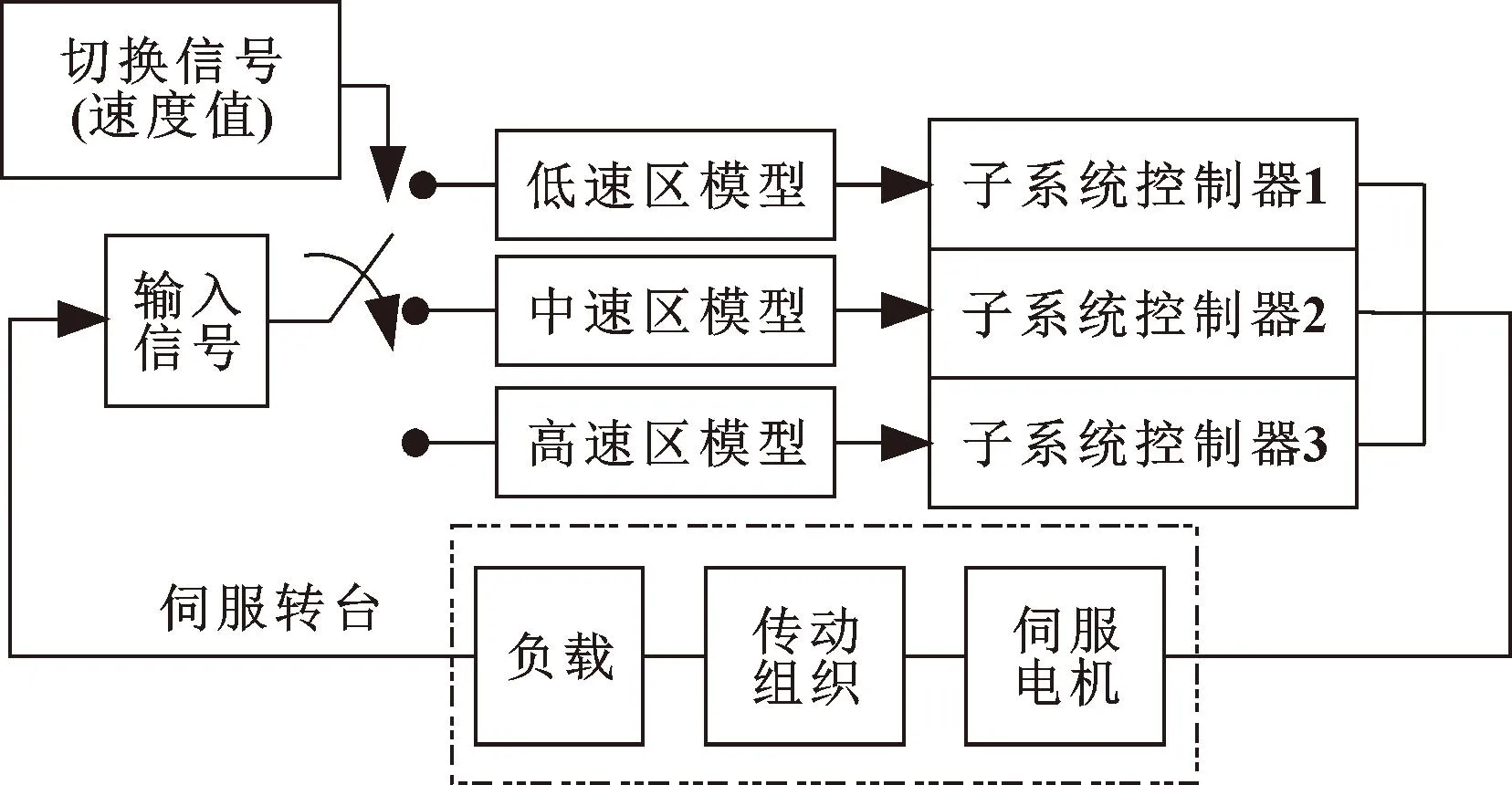
图4 控制策略设计框图
2.2 子系统控制器设计
为了在物理上实现状态反馈,将状态观测器引入反馈中,如图5所示。

图5 含状态观测器的状态反馈

图6 机电伺服系统
假设系统为如下的n维系统:
(13)
其中:rankC=q,A∈Rn×n,B∈Rn×p,C∈Rq×n。
步骤1,对于给定系统矩阵C,选择任意矩阵R∈R(n-q)×n,得到n×n维的非奇异矩阵P。
(14)
步骤2,对P进行求逆,并分块化。
Q≜P-1=[Q1⋮Q2]
(15)
其中:Q1为n×q的矩阵;Q2为n×(n-q)的矩阵。
(16)

步骤4,计算期望特征多项式。
基于分离性原则,计算状态反馈矩阵H。设计期望闭环极点λi(i=1,2,…,n)作为性能指标。
(17)
对比式(17)的同阶项,即可得到矩阵H。同理地,设观测器的期望特征值为λoi(oi=1,2,…,n-q)
(18)
步骤6,得到降阶观测器如下:
(19)
(20)
(21)

(22)
3 稳定性分析
定理1[17],对离散时间线性时不变自治系统,A的全部特征值λi(A)(i=1,2,…,n)的幅值均小于1,这是xe=0(原平衡点状态)渐近稳定的充分必要条件。

切换系统中的任意切换序列为
Γ={(t1,Aσ(1)),(t2,Aσ(2)},…,(tk,Aσ(k))}
(23)
其中:tk取任意正实数,表示切换系统的切换时间间隔;Aσ(k)∈{Aσ(1),Aσ(2),…,Aσ(k)};(tk,Aσ(k))表示在切换系统状态矩阵为Aσ(k)的子系统运行tk时间,并在Aσ(k)子系统运行结束后立即切换到系统状态矩阵为Aσ(k+1)的子系统。

x(k+1)=(Aσ(k)-Bσ(k)H)x(k)
(24)
由此,将加上状态反馈控制的离散切换系统看作在相同的任意序列下形成的离散自治切换系统式(24)。
由文献[18]可知,离散自治切换系统在任意切换序列下切换渐近稳定,即离散切换系统通过状态反馈控制在任意切换序列下切换渐近稳定,定理得证。
4 仿真及实验分析
为验证文中伺服系统的切换模型的准确性和控制策略的有效性,使用双轴伺服系统的方位轴进行实验,如图 6所示。伺服系统的控制系统由半实物仿真平台RTU-BOX和上位机编译系统组成。该伺服系统整体则由伺服电机、驱动器、编码器及系统机械本体组成,编码器可实时记录输出系统,频率为10 kHz。
4.1 伺服系统切换模型验证
子系统的未知参数分别采用模拟退火算法进行辨识[19],得到不同速度区域的子系统模型如下:
上述子模型根据式(11)计算,在60次迭代后结果为0,这意味着系统切换满足平坦条件。以正弦信号作为输入,辨识得到的子模型速度跟踪如图 7所示。
图7中低速区非线性较强,且半实物仿真平台无法精准检测到细微的转速变化,故图7(a)跟踪精度略低。由图8所示的误差箱型图可知:低速区的误差值大部分在-0.4%~0.4%内,误差平均值约为0.05%。由于伺服系统存在齿隙、死区等复杂结构,故在换向点即过零点处,转速无法精确检测,此处误差最大。同理,中速和高速的速度跟踪曲线中,换向点处的误差最大,这也是箱型图中异常点的来源。

图7 子系统参数辨识模型结果比对

图8 子系统参数辨识模型结果误差

图9 不同的模型速度跟踪效果
中速区和高速区除换向点外,速度跟踪效果理想,误差值大部分在-0.2%~0.2%内。中速区的误差平均值为-0.05%,高速区的误差平均值为0.03%。上述结果验证了子系统模型的准确性和精确性。为验证切换模型的有效性,引入传统传递函数进行对比[20]。以不同幅值的正弦信号作为输入,得到输出结果如图 9所示。可知:除过零点外,低速区的几个模型速度跟踪效果良好。随着转速逐渐增大,传递函数模型无法实现精准跟踪,在高速区跟踪误差达到最大。而单独的低速区模型和中速区模型也在高速区域的跟踪效果变差。结合图10所示的跟踪误差箱型图分析,4个模型的跟踪误差范围大部分在-2%~2%内,切换模型误差的异常值最小。

图10 不同的模型速度跟踪误差
4.2 伺服系统切换控制策略研究
为验证切换模型控制策略的优越性,采取传统PID控制策略进行对比研究。控制器的仿真及实验均采用文中建立的切换模型。文中设计子系统控制器分别如下:
图11所示为PID与状态反馈控制器方法的仿真结果对比。结合图11放大部分可知:整体跟踪效果状态反馈控制器的速度更接近输入信号值。仿真结果中,文中提出的基于状态反馈的切换控制策略速度跟踪误差平均值为-0.003 76 rad/s,低于PID的误差平均值-0.007 16 rad/s,而其速度跟踪误差的方差值也低于PID控制器的0.485 86 rad2/s2。因此仿真实验中,文中提出的切换控制策略优于PID控制器。

图11 仿真结果
图12所示为控制策略的实验结果对比。由于过零点转速变化细微,半实物仿真平台无法精确检测到,故图中曲线在过零点处误差较大。根据转速区域的划分,在低速区非线性较强,PID控制策略在接近过零点处的误差比状态反馈控制器大。在中速区和高速区,PID控制器和状态反馈切换控制器的跟踪效果都优于低速区。根据表2及图12可知:状态反馈控制器的误差平均值为0.023 241 rad/s,优于PID控制策略。实验结果表明:基于状态反馈控制器的切换控制策略与PID控制器相比,速度跟踪效果提升了约4%。

表2 仿真及实验误差分析
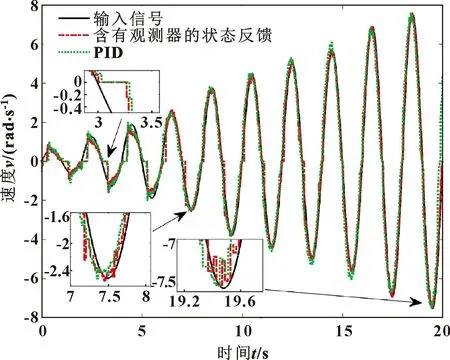
图12 实验结果
5 结论
文中基于伺服系统的非线性Bode图,得到其频域特性会随着转速的变化而发生变化。针对切换系统的抖振问题,在模拟退火算法中引入平坦性算法,对子系统参数进行辨识,由此建立了伺服系统的切换模型,并在此基础上设计了状态反馈控制器的切换控制策略。仿真及实验结果表明:建立的切换模型比传统的传递函数模型更加精确。基于切换模型的切换控制器能实现精确跟踪,尤其在非线性强的低速区,跟踪效果优于传统的PID控制器。
