基于北斗卫星通信技术的远洋船舶通信自动化控制系统
2024-03-11刘逸飞
刘逸飞
(交通运输部上海打捞局,上海 200090)
远洋船舶在航行过程中需要进行大量的通信交流,包括与船舶管理机构、港口、货主等进行通信和信息传递。传统的人工操作方式不仅存在人为错误的风险,还较为繁琐且耗时,容易延误航行进度,对于远洋船舶的安全性和运营效率提出了更高的要求。科技的进步和通信技术的快速发展,例如无线通信、互联网和卫星通信等,为船舶通信提供了更为可靠和高效的解决方案,这为远洋船舶通信的自动化控制提供了技术基础。
周淦淼[1]提出基于物联网技术的船舶短波通信数据抗干扰控制方法,通过识别船舶短波通信干扰数据特征,获取舰船低频段通信频率,计算船舶短波通信数据抗干扰数值,将计算结果作为参照进行纠错编码处理,实现对船舶短波通信数据抗干扰的有效控制。该方法虽然能够抑制多船低频干扰,但通信数据的谐频参量是实时变化的,导致短波船舶通信控制精度低、鲁棒性差,对于远距离的传输受到承载能力的限制,参数效率不高;季禹[2]提出船舶网络动态数据通信效率控制方法,基于优化调度算法强化网络动态数据通信有效控制,引入SNMP 通信协议和先进算法对通信数据进行传输、过滤、提取,保证数据通信的精确度。但该方法在单一组网运行方式条件下,实际应用性能比较受限,自动化控制效果还有待提高。
针对以上对当前远洋船舶通信自动化控制系统的分析,该文借助北斗卫星通信技术,研究并设计了远洋船舶通信自动化控制系统,以期为远洋船舶通信数据的实时传输提供保障,提高数据通信控制的有效性。
1 通信自动化控制系统功能
基于北斗卫星通信技术的远洋船舶通信自动化控制系统功能如下:系统组网和运行模式、数据传输终端的软硬件实现、中央服务器的软件实现。根据功能从上到下将系统划分为物理层、协议层和应用层,传感器节点分布在指定的区域进行检测,每个节点都有能力收集特定的信息信号。传感器节点通过CAN 总线将信息传输到下位机(ARM 嵌入式系统),下位机使用WiFi 模块与上位机路由器形成具有IEEE 802.11 b/g 标准协议的Ad Hoc(对等)网络,以传输传感器收集的数据信息,同时,数据信息显示在上位机(应用端)上。
在系统中,下位机具有传感器节点、CAN 通道和WiFi 通道的通信管理功能。下位机相当于大型传感器网络中的簇头节点,充当传感器节点信息的中继站。在处理、分析和融合传感器节点信息后,通过TCP/IP 实现的WiFi 无线网络将其发送到远程计算机,这种联网模式可以实现分布式节点数据传输和接收。
在GPRS 数据终端中,物理层主要由两部分组成:一部分是西门子MC35i GPRS 模块,用于实现与GPRS 网络的物理空中接口相连;另一部分是基于MPC860 的嵌入式系统,实现所有上层软件在中央服务器中的集成[3-4]。物理层用于互联网接入、实现互联网连接和各种服务器端软件的运行。
网络协议层主要用于屏蔽操作系统的上层软件和下层硬件,为上层软件提供和管理各种硬件资源。网络协议层建立并维护面向TCP 链路或非面向信道的UDP 数据包传输通道,从而实现多点到中心的链路连接[5-6]。其中的GPRS 数据终端PPP 协议部分实现了数据终端与移动GGSN 之间的点对点链路连接。
应用层实现各种特定应用、系统控制、数据图像的加密和压缩以及其他处理。该研究为实现系统的基本功能以保证实际应用需求,结合远洋船舶通信数据传输原理,对远洋船舶通信自动化控制系统进行设计。
2 远洋船舶通信数据接收与速率控制
2.1 通信数据接收与发送
系统通过手持终端机实现对上一阶段通信数据的接收与向下一阶段的数据发送,该部分控制核心为单片机,同时在外围通信接口配置三个辅助转换芯片,以防止出现丢包现象。其包括八个功能键,主要用于输入原始通信数据,并经转换芯片转换后输出[7];其中内置的X2514 复位电路可以同时实现微机复位与通电复位,且其异步通信端口可直接与数据传输模块连接,负责无线传输信道与调度机的交换。手持终端机的主要技术参数如表1 所示。在手持终端和嵌入式操作系统的硬件上,首先是实现各种设备驱动程序,包括GPRS 模块、DART、以太网等;然后执行与移动GPRS 网络GGSN 建立点对点链路的PPP 协议,以及用于公共网络的TCP/IP 协议;主线程负责建立监听组件[8],为每个GPRS 数据终端建立接收数据的主程序,并与多个终端建立连接并发送数据,完成整个程序的控制和相关处理。

表1 手持终端机的主要技术参数
2.2 数据速率控制
系统通过时钟控制器改变数据传输规模来控制数据速率,起到向系统软件控制的最小系统发送固定速率数据的作用。该系统的时钟控制器采用DDS控制器,以200 MHz 晶体振荡器为基准时钟,AD9850为数字频率控制芯片。首先,根据TLK2711 控制器所需的时钟频率CLKuser和PLL 的乘法系数,计算进入FPGA 的模拟锁相环PLL 的时钟频率CLKout;其次,设计FPGA 时钟控制逻辑,将频率控制配置到AD9850 中;最后,AD9850 通过PLL 输出数字时钟频率CLKout作为供TLK2711 控制器使用的数据传输固有频率[9]。DDS 时钟控制器的实现框图如图1 所示。

图1 DDS时钟控制器设计实现框图
DDS 时钟控制器具有能够实现全数字化、可编程的频率合成控制功能,不仅能够产生正弦波的模拟信号输出,而且还可以通过高速比较器输出方波的数字信号,并具有相移功能。在200 MHz的参考时钟下,DDS 时钟控制器的最大频率为500 MHz,分辨率为0.021 4 Hz。AD9850 产生的频率输入FPGA 后,通过FPGA 内部的PLL(模拟锁相环)也可以获得更稳定的频率[10]。
3 北斗卫星通信技术通信自动化控制
3.1 数据信号捕捉
北斗卫星通信技术具有信号覆盖范围广、信息数据加密传输安全性高等特点,能够同时实现对其所有下属用户机通信数据的监收与命令发送[11]。因此,该文采用北斗卫星通信技术捕捉远洋船舶无线通信数据信号,为下一阶段通信数据收发模块的设计奠定基础。利用三个子载波α1、α2、α3的平均值对原始数据进行调制,得到导航电文的水平信号为:
水平信号通过被动卫星MEO 方式,需要进行重复调制,利用NH 编码的方式将原始数据转换为带有伪码的波动信号[12]。原始信号帧结构如图2 所示。

图2 原始数据信号帧结构
将跟踪的初始信号降阶为基带信号,并利用式(2)对原始导航电文进行解析[13],获取基带模块的中频信号,即:
式中,d(t)表示数据射频函数;ω0表示中频信号的初始频率;θ0表示初始信号位移;t表示采样时间。
为确定信号的频移范围,采用导航载波偏移矩阵设置本地载波频率,计算公式为:
式中,g0表示偏移矩阵;T0表示信号周期;χ1表示信号多普勒频移系数。
利用北斗卫星通信技术,得到的初始信号频移范围为:
式中,H+、H-分别表示信号频移范围的上、下限;γ0表示数据字段长度;j表示帧识别码;β1表示尺度参数。
经过信息处理模块处理后验证数据的有效性,即:
式中,μ0表示随机矢量;Q表示标签随机整数;U表示系数矩阵;t0表示经验参数;h1表示读写器计算得到的整数,若h1大于或等于预设阈值,即h1≥rt,则表明当前获取的信息数据即为有效数据。
计算信号的基准频率如式(6)所示:
式中,φz表示信号谐振波位移;η0表示地面中心基站信号接收效率。
基带模块调制后的信号S(t)计算式如下:
式中,k表示子载波正交性系数;ϑ0表示信号混频积分因子。
通过特殊设备捕捉到的远洋船舶通信信号为:
式中,w0表示信号码率;pt表示导航信号与卫星之间的测距码;u(t)表示捕捉到的通信数据信号。
依据北斗卫星通信技术原理,确定通信数据信号的频移范围,由此计算通信信号的基准频率,结合调制信号完成对远洋船舶通信数据信号的捕捉。
3.2 无线通信程序设计
根据系统功能模块的划分,无线网络通信程序的设计包括数据采集器、客户端和服务器。该系统采用ISO/OSI 七层开放互联体系结构设计无线通信程序,其无线通信程序实现流程如图3 所示。设置数据过滤方式、波特率参数、掩码寄存器打开方式和工作模式初始化程序后,进入程序的主循环。当检测到系统中存在要发送或接收的数据时,程序根据预设的发送和接收函数顺次发送和接收数据[14]。
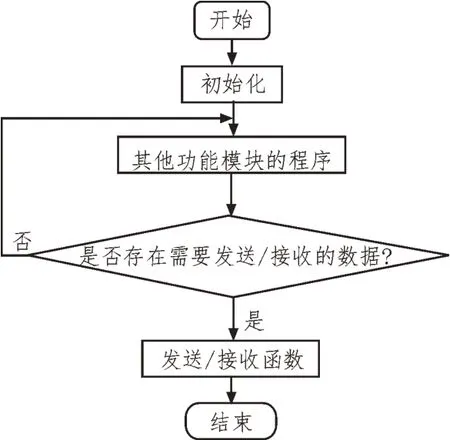
图3 无线通信程序实现流程
程序节点采用的接收方法是中断接收,在端口接收数据时产生中断信号,当主控制器检测到总线上的数据时,控制器立即识别相应的数据并执行接收处理,并将其存储在接收缓冲器中[15]。同时,总线控制器立即启动中断服务程序,从接收缓冲器读取接收到的数据,并为后续处理做准备;通信程序节点采用轮询传输方式。当端口有数据要发送时,端口主动发送并确定当前CAN 总线是否空闲,如果处于空闲状态,则进入传输阶段;如果没有空闲,则继续等待[16-18]。
根据以上计算与对系统模块化的设计,通过捕捉通信数据信号,并利用发送与接收函数研究系统的无线通信程序,完成基于北斗卫星通信技术的远洋船舶通信自动化控制系统的设计。
4 系统性能测试结果与分析
为验证该文设计的远洋船舶通信自动化控制系统在实际应用中的可靠性,现对其进行性能测试,并引入其他系统与该文系统进行对比,根据对比测试结果分析该文系统的传输性能。
4.1 测试准备
在系统原型开发完成后,对系统进行性能测试。测试系统使用笔记本电脑通过常规电话线连接互联网,实现通信服务器部署;使用GPRS DTU 连接网络。数据从GPRS DTU 发送,一旦到达通信服务器,通信服务器立即将数据返回给GPRS DTU,以此完成一个数据传输过程。测试系统硬件实物图如图4所示。实验中选择HPZ800 服务器作为高速数据传输系统的计算机平台,它共有6个PCIe插槽和Windows 7操作系统环境。设计和实现的应用程序具有在单个DMA 操作中配置读/写TLP 的长度和数量的功能,以及通过计算接收/发送的数据量和经过的时间来观察通信控制速率的功能。此外,使用LJ1traEdit 软件比较和分析数据中的传输错误。

图4 测试系统硬件图
4.2 测试说明
系统传感器以整点或以十分钟为间隔报告数据量。因此,基于北斗卫星通信特点,该系统的传输协议采用分组传输,对丢失的数据采用重传机制。上述功能由编码器和解码器共同完成。编码器和解码器数据传输协议的基本格式如表2 所示。基于数据传输协议,系统采用实数编码的形式对通信数据进行预处理,其中数据传输格式说明如下:帧头为北斗卫星通信协议的关键字,为2 字节;标识段为目标设备的基础运行信息,包括指令标识符与观测标识符,分别为4 字节与3 字节;数据段包括运算符和有效数据,分别代表通信数据的高分组数与低分组数;校验段为从帧头到数据段的全部字节长度。
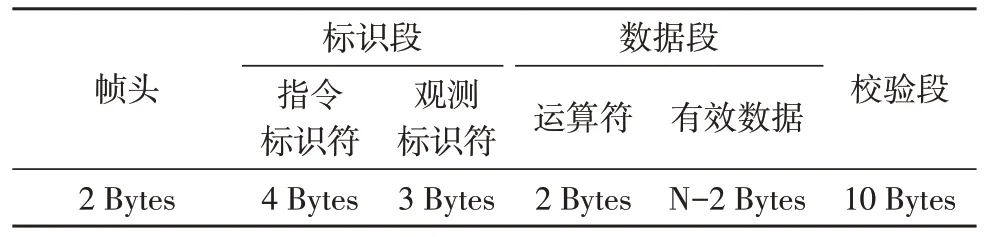
表2 数据传输协议格式
4.3 系统通信控制速率对比实验分析
为直观地比较该文研究的系统在远洋船舶通信自动化控制中的实际应用性能,引入基于以太网物理芯片(系统1)、基于数学模型(系统2)作为该文系统的对比系统,比较在不同通信距离下,三种系统的通信控制速率,结果如图5 所示。从图5 可以明显看出,在不同通信距离条件下,三种系统的通信控制速率均随着通信距离的增加而降低,但通过实验结果对比可知,在相同通信距离时,该文设计的系统通信控制速率均要高于其他两种系统,表明该文系统具有较高的控制效率。分析原因可知,系统1 在建立数据库连接链路时,未对实时数据进行自动化存储处理,故而影响了控制速率;系统2 由于系统各模块的处理时间较长,从而增加了控制耗时。由此可以说明,针对远洋船舶通信自动化控制,该文设计的系统能够有效提高通信控制速率。
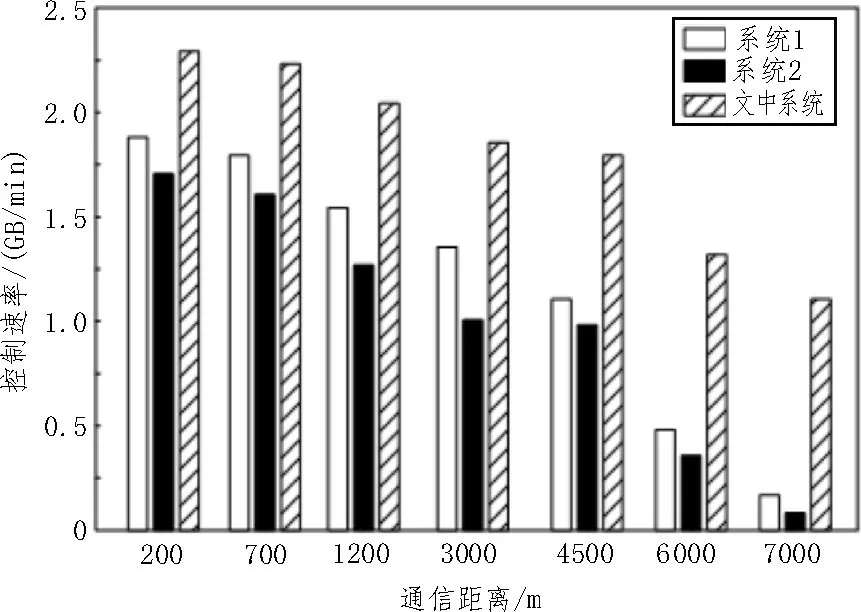
图5 不同系统通信控制速率对比结果
4.4 通信时延对比实验分析
基于以上实验结果,为进一步证明该文系统在通信控制效率方面的可靠性,对数据发送时钟频率进行配置,初始发送频率固定为25 MHz,并逐步提高发送时钟频率,即提高模拟数据源发送数据位宽,分别测试三种系统在不同发送时钟频率下的通信时延,时延越小,表明系统控制速率越快,传输效率越高,结果如图6 所示。根据图6 可知,通过不断调整发送时钟频率来测试对比系统与该文系统的通信时延情况,测试结果表明,在发送时钟频率范围为25~150 MHz 时,该文设计系统的通信时延均在0.4 ms 以下,远低于其他两种系统。因此可以证明,该文系统在通信自动化控制方面具有较高的控制效率。

图6 不同系统通信时延对比结果
5 结束语
针对传统远洋船舶通信控制系统存在数据传输效率较低的问题,该文结合北斗卫星通信技术设计了一种新的通信自动化控制系统。经系统性能测试结果表明,该文系统能够有效提高通信控制速率,减少控制耗时,通信控制速率远高于传统系统,可以有效解决控制效率较低的问题。在未来发展中,要不断提升定位精度和可靠性、改善数据传输速率和容量、强化安全保障措施、整合多种导航系统并结合人工智能技术。