基于变车头时距的汽车自适应巡航系统设计
2024-03-11杨薪敬
冯 莉,杨薪敬,曾 辉
(重庆交通大学交通运输学院,重庆 400074)
随着电子技术的发展,汽车从机械产品向电子化、智能化转变。各种电子技术的应用,也使得汽车智能化程度逐步提高,为汽车自适应巡航控制系统(Adaptive Cruise Control,ACC)设计提供完整的技术支持。ACC 可根据各种影响因素调整车速,无需驾驶员手动干预。其主要功用为通过控制策略动态调整车辆的加速或减速,实现车辆纵向的定速巡航和安全跟车功能。在高级汽车辅助驾驶系统中,自适应巡航系统对于减少驾驶员疲劳行车强度、提高行驶安全性、改善道路通行能力具有重要的作用。因此得到了研究学者和汽车公司的广泛关注。
近年来,研究人员对于ACC 系统开展了一系列研究。Chen J 等人[1]针对自适应巡航控制(ACC)和协同巡航控制(CACC)系统,提出了一种改进的可变车头时距策略。控制算法主要有PID 控制[2]、最优控制(Optimal Control Theory,OCT)[3]、模糊控制(Fuzzy Control,FC)[4]和模型 预测控 制(Model Predictive Control,MPC)[5-8]等。
对于安全间距策略前人开展了详细的研究,但是大部分最小间距都设置成固定值,未区别不同的行驶条件;对于控制算法的研究多种多样,但多数控制器的运算速度要求非常高。因此,选择对车头时距模型进行优化,同时提出一种车距-速度串联式控制策略,通过状态机实现不同模式切换,最后在定速巡航以及复杂的跟随工况下进行仿真测试。
1 ACC系统结构
ACC 系统结构如图1 所示,主要分为三个部分:CarSim 整车模型、ACC 上层控制策略、ACC 下层控制策略。利用CarSim 搭建模拟驾驶环境,包括行驶车辆、道路信息和传感器等,同时输出两车相对速度、相对距离、加速度等行车信息。上层控制器在接收行车信息后,通过车头时距模型计算期望跟车间距,结合其他行车信息确定行车模式,最后利用控制算法求解期望加速度。下层控制器通过上层信息计算期望节气门开度/期望制动压力,并输入到CarSim 中控制汽车运动,实现系统实现闭环控制。

图1 ACC结构框架图
2 ACC控制策略
在ACC 上层控制器中,根据行驶工况分为定速巡航和跟随巡航,主要目的在于求解不同模式下的期望加速度。首先,需要建立车头时距模型,其次,需要设计定速巡航/前车跟随模式之间的切换策略,最后,通过控制算法计算期望纵向加速度。下层控制器需要建立反馈控制器与油门/刹车标定表求取期望节气门开度与期望制动压力。
2.1 变车头时距模型
汽车在行驶中面临复杂的行驶工况。设计合理的间距策略直接影响行车安全和道路的利用率。汽车在道路上行驶时,车速大车距小,容易发生追尾;而两车之间保持过大的行车距离,不仅会导致道路有效利用率低,而且还会引起周围车辆从相邻车道插入,从而导致交通事故的发生。
目前,对安全距离模型的研究主要为固定车头时距(Constant Time Headway,CTH)和可变车头时距(Variable Time Headway,VTH)。CTH策略即本车速度与时间常数的乘积加最小安全车距[9-10],结构如下:
其中,vh为本车速度,th 为车头时距数值,dmin为最小安全距离。
虽然CTH 策略较为成熟,但仅能反应本车速度的影响,未考虑其他影响因素,道路利用率低,适应性差。在此基础上,研究人员开发出可变车头时距,两者的区别为车头时距th 的数值是否为定值。
常用的可变车头时距模型,主要有两种结构。第一种,如文献[11-12]强调相对速度和前车加速度的影响,第二种,如文献[13-15]侧重本车速度和相对速度的影响。结构分别如下:
其中,t0、cv、ca、th1、th2、th3皆为常数且数值大于0,vr为两车相对速度,ap为前车加速度。但精准获取前车加速度的方法需要进一步研究。因此,选用第二种可变车头时距模型,若th 过大道路利用率低,过小则易撞车,为考虑th 的合理性,选择建立饱和函数进行限制,保证修正后的车头时距在合理的范围之内,防止极端工况下车头时距太大或太小。结构如下:
其中,sat(·)为饱和函数,th1、th2、th3为常数,该文分别取值1、0.04、0.09。thmax、thmin分别为车头时距极大值和极小值,一般取3 和1.5[15]。
同时,在大部分的车头时距模型中,无论是CTH还是VTH 都将最小车间距离dmin设置成固定值,取值范围通常为2~5 m[10]。为考虑汽车行驶安全性,综合考虑本车速度和路面附着系数的影响,设计改进型变车头车间时距(Improved Variable Time Headway,IVTH)表示为如下:
其中,Kh为自车速度系数,b为常系数,分别取22.5 和0.3。由式(1)和式(4)可知,dmin与本车速度成正比,与路面附着系数成反比,路面附着系数越低,最小车间距离越大,符合实际驾驶条件。
2.2 模式切换策略研究
上层控制器包含巡航模式和跟车模式,两者输入误差量不同,求取的期望加速度也有差异,因此如何设置模式切换策略非常重要。系统模式切换策略如下:
1)车辆启动,传感器识别前方信息,该文设定的传感器探测范围为200 m。若前方无车或两车间距ddes大于200 m,车牌识别号ID 输出值为-1,ACC 系统进入定速巡航模式,汽车期望车速为巡航车速。
2)若前方有车,两车间距ddes小于200 m,车牌识别号ID 输出值为1,系统进入下一步判别。期望车头时距dact小于两车实际间距ddes,系统保持定速巡航模式;期望车头时距大于两车实际间距ddes且前车车速小于本车巡航车速,系统进入跟随模式,否则保持巡航模式。
3)当前车驶离,若有新车出现,则系统重新规划。如果前方无新车出现,则进入巡航模式。
2.3 ACC控制算法设计
2.3.1 PID控制器原理
PID 控制是日常工业生产中运用最为广泛的控制方式,其主要根据系统的期望输入和实际输入的误差来实现系统的控制输入,因此不需要建立复杂的被控对象模型[16]。
PID 控制由比例环节、积分环节和微分环节构成。其数学表达式如下所示:
系统控制变量u(t)是由期望值r(t)与实际反馈值c(t)的差值e(t)经过比例、积分和微分调节而构成的。因为计算机是离散系统,为符合运算需要,对连续PID 算法进行离散化处理。以矩阵法数值积分近似代替积分,以一阶后向差分近似代替微分,如下:
2.3.2 巡航模式
当前方无车,或者前车行驶速度高于本车巡航速度时,本车以巡航车速行驶,其任务为将车速保持在期望值。PID 控制器输出为期望加速度,输入为车速之差,如下:
2.3.3 跟随模式
当汽车进入跟随模式,系统控制目标为控制行车间距dact(t)尽可能接近期望行车间距ddes(t)以及两车相对速度vr(t)差趋于0。关系表达式如下:
因此,该文跟随模式如图2 所示,综合考虑间距偏差和速度偏差的影响,设计距离-速度串联式PID控制器,求取本车期望加速度。该控制器由两个PID 串联组成,距离控制器以行车间距偏差Δd(t)作为控制器输入量,输出量作速度控制器输入补偿量Δe(t);速度控制器以两车相对速度vr(t)和速度补偿量Δe(t)之和作为输入,如下:

图2 跟随模式控制流程
控制器输出为期望加速度ades,为保持良好的舒适性,对加速度进行限制[17],取值范围为[-5,3]。
2.3.4 下层反馈控制
为满足系统快速响应的要求,该文设置反馈PID 控制器求取加速度补偿量,将期望加速度ades与当前实际加速度aact之差作为控制器输入,求取加速度补偿量。
通过对期望加速度补偿得到a(t),进而标定表根据加速度和实际车速,查表得出节气门开度或制动压力,输入CarSim,从而控制汽车运动,如下:
3 ACC系统仿真验证
该设计选用C-Class,Hatchback 型汽车作为仿真车辆。设置仿真环境,其中路面附着系数为0.8,摄像头探测距离为200 m。
1)定速巡航工况
设置工况:本车初始速度为60 km/h,巡航车速设置为120 km/h,结果如图3 所示。
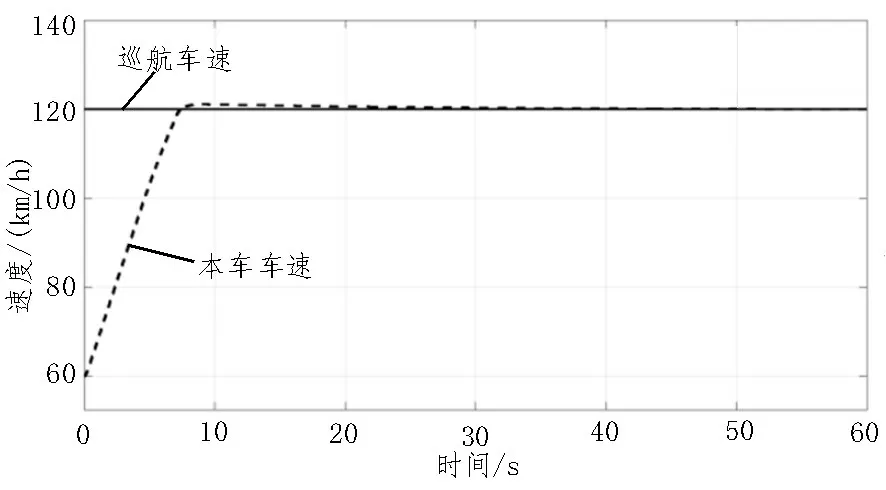
图3 定速巡航工况仿真结果
由于前方没有车辆,汽车仅考虑速度偏差,本车在7 s 后加速至设定车速,加速平稳,超调量小,同时保持巡航速度稳定行驶。
2)复杂跟随工况
前车行驶工况包含匀速运动、急加速运动、急减速运动。初始间距为40 m,本车起始速度为75 km/h。仿真如图4 所示。
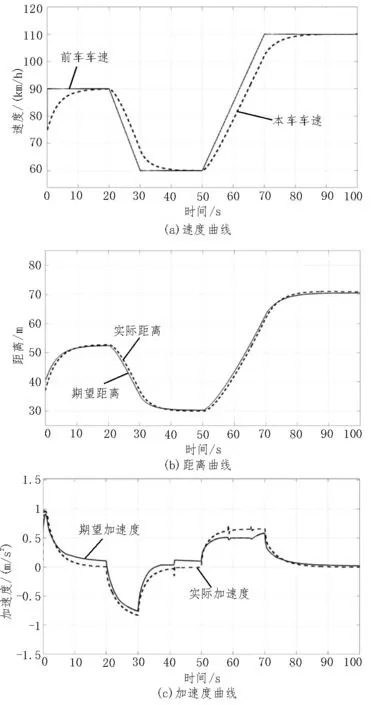
图4 跟随工况仿真结果
速度变化曲线如图4(a)所示,在前期,前车匀速行驶,期望距离与实际距离相近(如图4(b)),前车速度低于巡航速度,根据切换逻辑确定本车为跟随模式,故本车加速跟随前车速度,15 s 后两车速度趋于一致,保持匀速行驶。20 s 后,前车速度开始频繁变化。虽然行驶工况较为复杂,但在安全距离允许的条件下,本车保持了对前车的稳定跟随,两车速度趋势一致,相较于前车设定速度,本车的速度变化曲线更为平滑。
同时,由于汽车行驶工况变化,为保证行车安全,理论上两车间距应相应改变。由图4(b)可知,加速/减速阶段期望车距均反应迅速,随行驶工况改变。在运行期间,距离控制效果优异,实际间距始终保持对期望车距的稳定跟踪,保证行驶安全性。
图4(c)为加速度变化曲线。由图可知,加速度始终保持在一定范围,保证行驶舒适性。下层控制器能够保证对期望加速度的稳定跟踪,控制效果良好。图中小波动应为油门及刹车的切换过程中造成的一些波动,对于实际的自适应巡航控制来说微乎其微。
因此,由以上分析可知,所设计的控制策略控制效果良好,即使在复杂跟随工况下,均能快速准确的根据前车速度和距离的变化,来控制本车车速变化,保持对前车的稳定跟踪,同时满足汽车行驶安全性和乘坐舒适性。该下层控制器基本实现对期望加速度的跟踪,通过与上层控制器联合仿真,实现整个自适应巡航系统的功能。
3)安全距离算法仿真验证
上文验证了该控制策略具有良好的控制效果,为验证间距策略效果提供仿真基础。同时上述工况复杂,包含匀速运动、急加速运动、急减速运动,适用于验证车间时距模型。因此,在上述仿真基础上,将该文提出的IVTH 与文献[10]、[15]建立VTH、CTH 算法进行三组仿真对比,主要考察在跟车过程,车速度不断变化时,ACC 的间距策略对安全性和跟车性能的影响。仿真情况如图5 所示。

图5 不同间距策略仿真结果对比图
由图5(a)可知,在前20 s,CTH、VTH 跟驰情况相似,IVTH 策略下所需实际间距略低,由于前车速度大于本车,本车需要加速跟随前车,IVTH 策略间距较小,提升了一定的跟车性能和道路利用率。20 s后,前车进入减速阶段,三种策略均随速度变化明显,但汽车降速后,CTH 策略下实际间距仍然较大,道路利用率低容易引起旁车插入。50 s 后汽车开始加速,高速下两车车间距离加大,减小了突发状况引起的追尾风险,VTH、IVTH 间距明显大于CTH,安全性能更好。
由图5(b)可知,三种间距策略都能使汽车车速接近前车,差别不大,但前3 s CTH 与VTH 策略需减速行驶,IVTH 反应更灵敏,效果更平滑。总体而言,CTH 实际间距较大,道路利用率低;相较于VTH,改进的IVTH 效果更好,跟车速度变化曲线较为平滑,低速和加速工况下道路利用率更高。
4 结论
该文基于变车头时距设计了汽车自适应巡航控制系统。通过Matlab/Simulink 和CarSim 联合仿真结果证明:
1)设计的上层控制器能够合理地根据巡航/跟车模式切换策略计算相应的期望加速度,不同工况下均能快速准确控制本车车速变化;设计的下层控制器能够保证对期望加速度的稳定跟踪。从仿真结果来看控制算法效果较好,满足汽车行驶安全性、跟车稳定性和乘坐舒适性的需求。
2)设计的变车头时距模型,考虑多因素影响,仿真结果表明其能适应多种复杂工况,相比其他车头时距模型,高速安全性好、低速道路利用率高、跟车速度平滑、反应灵敏。