电动汽车增程器启动技术研究
2024-03-11张兰红吕中正黄陈桃陈永楼
张兰红,吕中正,2,黄陈桃,陈永楼
(1.盐城工学院电气工程学院,江苏盐城 224051;2.江苏大学电气信息工程学院,江苏 镇江 212013;3.江苏友和动力机械有限公司,江苏盐城 224031)
目前纯电动汽车存在一次充电续行里程短、充电桩少、充电时间长等问题,这些问题容易导致电动汽车驾乘人员产生里程焦虑[1-2],为了解决电动汽车的里程焦虑问题,加装了增程器的电动汽车成为了电池技术突破之前由传统燃油汽车向纯电动汽车过渡的理想车型[3-6]。
增程器工作时首先需要完成启动,然后才能对外发电。增程器由发动机、起动/发电电机(Integrated Starter and Generator,ISG)和控制器组成,其启动是指发动机在ISG 电机电动状态驱动下,由静止到达点火速、再反过来拖动电机发电的过程[7]。增程器启动过程中涉及到ISG 电机和发动机两个部件的起动及相互之间的配合,增程器的顺利启动对于增程式电动汽车的安全运行至关重要,因此增程器启动技术一直是研究人员的关注重点[5-8]。
1 带有增程器的电动汽车动力系统结构
典型的带有增程器的电动汽车动力系统结构如图1 所示[7]。在车载蓄电池电量充足时,由蓄电池给主驱动电机供电;在蓄电池电量不足时,增程器充当辅助发电系统,经直流母线给主驱动电机供电,使汽车继续保持强劲的行驶动力,同时给蓄电池充电,有效延长电动汽车行驶里程和蓄电池寿命。
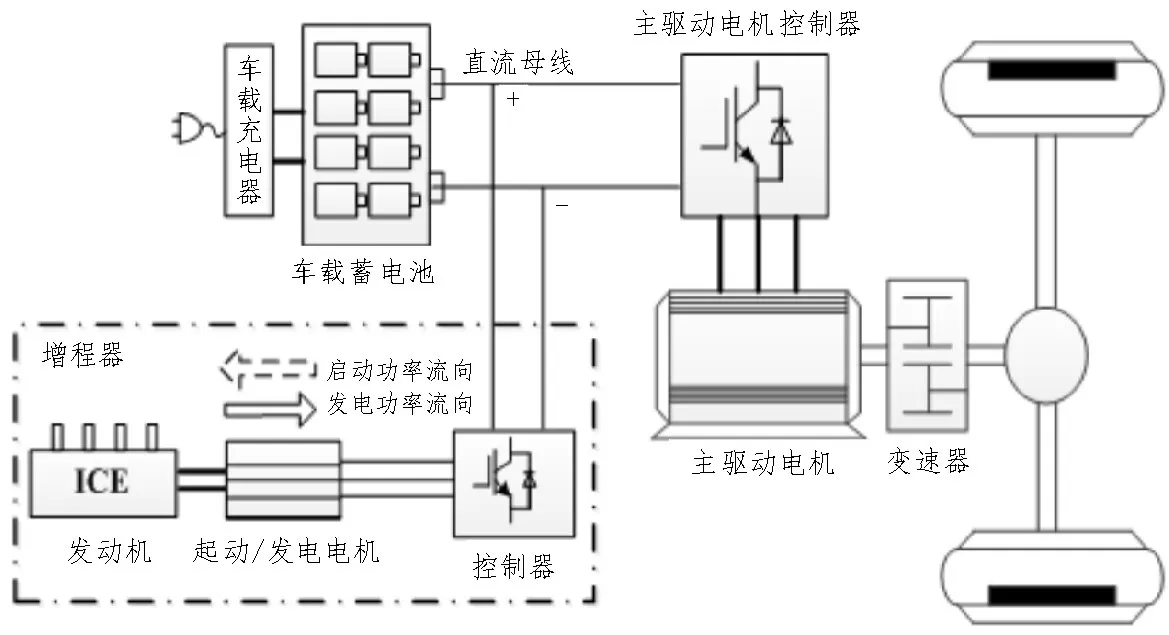
图1 带有增程器的电动汽车动力系统结构
从图1 可知,增程器由发动机、ISG 电机和控制器组成。发动机是动力源,但发动机起动时,首先必须由外力将它拖动到点火速度,然后才可以自主旋转,向外输出转矩,带动电机发电。增程器发动机通常选择单活塞转子或两缸汽油机[9]。
ISG 电机在增程器启动时处于电动状态,将蓄电池电能转变为机械能,拖动发动机旋转到点火速度;在发动机到达点火速度后,ISG 电机转为发电状态,由发动机带动它旋转发电,经控制器向直流母线供电。由于增程器安装在汽车内部,因此对电机的体积、重量与可靠性要求较高。无刷直流电机具有体积小、重量轻、响应快、惯量小、转矩稳定等优点,成为增程器ISG 电机的较优选择[9]。
2 无刷直流电机的准闭环起动
为了简化工艺,增加抗干扰能力,无刷直流电机采用无位置传感器技术。电机在正常运转时通过反电势过零信号获取转子换相位置[10]。但在启动时,电机静止或低速运行,反电势信号为零或很小,无法根据反电势过零信号来判断转子换相位置。增程器中的无刷直流电机起动时,需要克服发动机不断变化的起动阻转矩,若采用传统三段式启动方法[11-13]将难以可靠地保证完成起动发动机的任务。
针对增程器中无刷直流电机的启动,该文提出一种准闭环起动方法:先利用定子绕组电感随转子位置变化的规律,通过施加定子脉冲电压矢量、比较母线电流的方法实现转子定位和准闭环加速,当电机转速加速到一定值时,再切换到根据反电势过零点判断转子位置的状态。
2.1 基于定子绕组电感变化的转子定位原理
无刷直流电机主电路拓扑结构如图2(a)所示,图中六个功率开关T1-T6 有三三导通和两两导通两种方式,两种方式下主电路等效电路如图2(b)所示[14]。
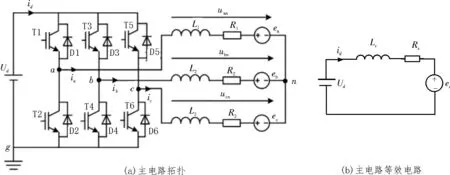
图2 无刷直流电机主电路及等效电路
图2(b)中等效电路的电压方程为:
式(1)中,Ud、id为直流母线电压与电流,Rs、Ls与es为定子绕组的等效电阻、电感与反电势。在电机静止和低转速情况下,es可忽略,式(1)可简化为:
直流母线电流id为:
式(3)中,τ=Ls/Rs,对式(3)进行泰勒级数分解,得到id的一次项为:
设定子绕组匝数为N,电机磁导为Λm,电感Ls与定子磁导Λm的关系为:
式(5)中,Λm=μFeA/l,μFe为定子铁芯磁导率,A为磁路截面积,l为磁路长度。由式(4)和(5)可知,母线电流id与电机等效电感Ls成反比,即和磁导率μFe成反比。若在同样时间内在定子绕组上施加一系列幅值相等而方向不同的脉冲电压矢量,母线电流id幅值就不一样,当所施加的电压矢量方向和转子N极方向相同时,磁路最饱和,磁导率最小,对应的电感值最小,母线电流峰值将达到最大值[14]。通过在定子绕组施加短时脉冲电压矢量,在转子没有旋转的情况下,检测母线电流峰值,可以判断出转子的初始位置。
2.2 转子初始位置的确定
图2(a)所示电路中,T1-T6 两两导通时有六种有效开关状态,用电压矢量V1-V6表示;T1-T6 三三导通时也有六种有效开关状态,用电压矢量V1s-V6s表示。将功率开关T1-T6 的导通和关断分别用1 和0 表示。T1-T6 两两导通和三三导通时共有12 个电压矢量,在αβ平面内如图3 所 示,其 中,12 个电压矢量可将αβ平面等分为Ⅰ-Ⅻ共12 个区间,每个区间为30°。
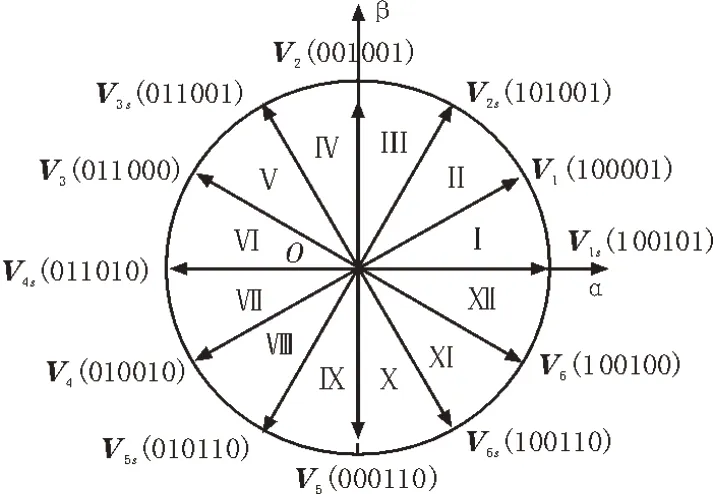
图3 电压矢量在αβ平面内的分布图
电机正常旋转时若施加Vn后转子可以刚好转到下一次导通的换相位置,便于加速控制,若施加Vns后转子转到离换相点30°的位置[14],因此选择施加三三导通电压矢量Vns来实现对转子的定位,选择两两导通电压矢量Vn来实现转子的加速与旋转。为了减小转子在大起动负载下的转动角度,采用三步定位法:
步骤1:60°范围预定位。为在转子定位时仅检测母线电流脉冲大小,而不使转子转动,施加三三导通短时 电压矢 量脉冲:V1s→V4s→V2s→V5s→V3s→V6s,脉冲时长小于电路时间常数,上述电压矢量作用后对应的母线电流分别为I1、I4、I2、I5、I3、I6。定子磁势Fs离转子N 极越近,母线电流峰值越大。找出I1-I6中峰值的最大值,就可以确定转子N 极。
步骤2:30°范围预定位。若阶段1 定位只有一个电流为最大值,此时需要继续定位。以I1最大为例,比较V1s相邻的V2s和V6s所对应的母线电流I2和I6:若I2=I6,转子N 极在V1s矢量方向上;若I2<I6,则转子N极 处于区间XII 内;若I2>I6,则转 子N 极 处于区间I内。以此类推可得转子所在区间与母线峰值电流的对应关系。
步骤3:精确定位。预定位完成后,根据转子所在区间施加表1 所示两两导通的电压矢量对转子进行精确定位。如转子在扇区Ⅰ或Ⅱ,施加足够大的电压矢量V1(100001),将转子强拉至V1方向,为转子的加速提供准确的初始位置。

表1 转子所在区间与所施加的电压矢量对应表
采用短时脉冲电压矢量实现转子定位,保证了定位阶段转子转过的最大角度不超过30°,保证在带载情况下定位成功。
2.3 转子准闭环加速
在转子位置确定后,需要按照一定规律给定子绕组通电,驱动电机加速旋转,保证起动成功,该文在加速过程中采用交替施加两两导通与三三导通脉冲电压矢量,其中两两导通电压矢量设为长时脉冲,用于换相与加速,三三导通脉冲电压矢量设为短时脉冲,用于定位,便于实时根据转子位置进行加速过程中的换相。短时脉冲时间宽度小于等效电路的时间常数,长时脉冲时间宽度为等效电路的时间常数的2~3 倍[14]。
用图4 来说明长时与短时脉冲电压矢量作用下的转子准闭环加速过程。图4(a)中转子初始位置位于XII 区间,设电机逆时针旋转,给电机施加长时脉冲电压矢量V2,随后加短时脉冲电压矢量V1s和V2s,比较母线电流I1和I2,即可检测出转子位置。设ΔI为换相电流阈值,若|I1-I2|>|ΔI|说明还未到换相位置,继续施加该区间的加速脉冲。当电流差值满足|I1-I2|≤|ΔI|时,说明转子已到达图4(b)所示的V1矢量方向,改为施加长时脉冲电压矢量V3,继续加速。通过判断与一对短时脉冲电压矢量相对应的电流峰值之差是否小于电流阈值,从而判断电机是否达到换相条件,实现电机加速过程中实时进行准闭环换相,提高带载加速过程中换相的成功率。
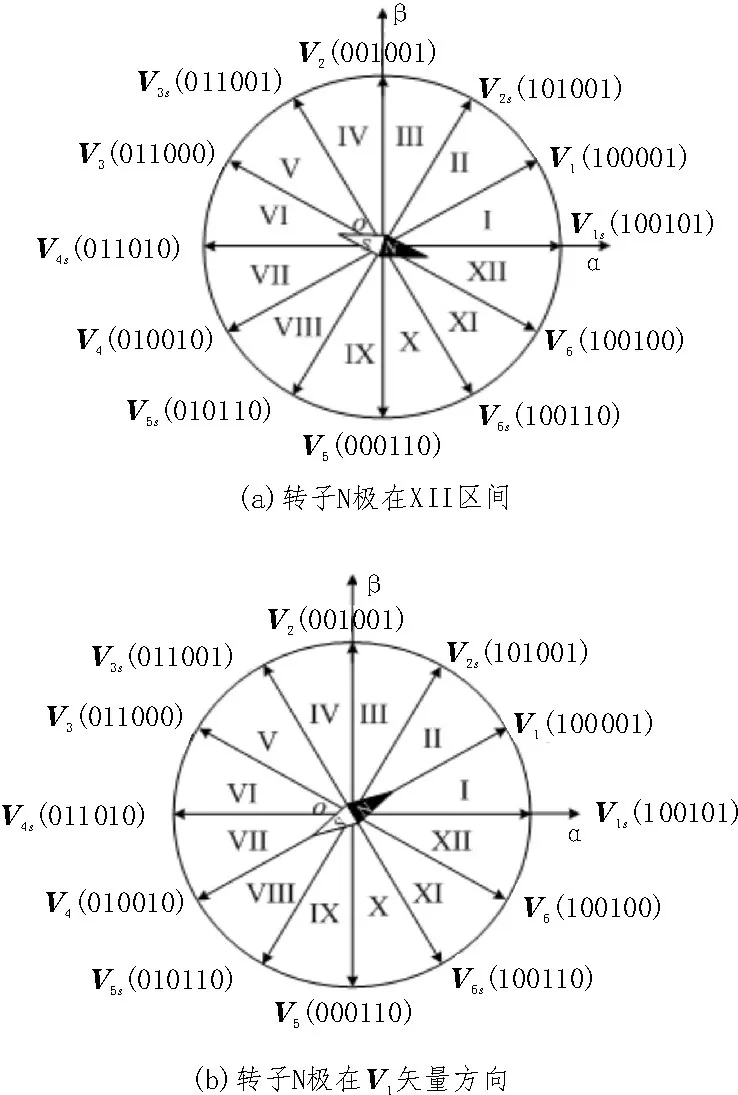
图4 转子准闭环加速过程中的定位示意图
当转子加速到一定速度后,将切换到自同步运行状态,电机运行于两两导通方式,根据反电势过零点来获取电机换相点,实现电机的无位置传感器运行。
3 环境温度对增程器发动机起动的影响及优化
增程器启动时,若外界环境温度过低,会导致发动机无法点火,导致增程器启动失败。外界环境温度对增程器发动机起动的影响为[15-16]:
机体温度过低。发动机在运行前机体温度与外界环境温度一致,如果外界温度过低,混合气体在接触缸壁后将变冷,使得燃油混合气体质量降低,导致增程器启动失败。
进气温度过低。进气气体包括氧气和可燃气体,环境温度过低导致进入发动机气缸的气体温度降低,无法达到燃烧温度,导致增程器启动失败。
(1)算法针对的是多站多外辐射源场景,对于单站多外辐射源场景和多站单外辐射源场景同样适用,具有较高的通用性.
燃油温度过低。增程器使用的燃油为汽油,汽油粘稠度随着温度降低而变大,粘稠度越大,产生可燃气体的速度越慢,不充分的可燃气体将无法使发动机成功起动。发动机多次启动失败将导致缸内壁产生大量的汽油成滴物,进一步影响气体的有效排出,更加恶化了发动机的启动过程。
为了改善由于环境温度过低导致的机体温度、进气温度与燃油温度对增程器发动机起动的影响,可分别对增程器机体进行预热、进气预热与燃油预热。增程器机体可以采用热水进行预热,将增程器机体放入热水中,用电能对水进行加热,增程器机体加热后,燃油和润滑剂升温,启动性能将得到改善;进气预热可以通过电热塞加热进气温度;燃油预热通过加热燃油,直接提高燃油混合气体雾化效果,改善增程器发动机启动性能。
4 实验研究
江苏友和动力机械有限公司生产了系列化增程器,以其中的YH3000 增程器作为实验对象,其参数如表2 所示。

表2 YH3000增程器参数表
4.1 无刷直流电机准闭环起动实验
增程器无刷直流电机转子在定位步骤1是注入顺序为V1s→V4s→V2s→V5s→V3s→V6s的短脉冲电压矢量,图5(a)和图5(b)为转子处于不同位置时的母线峰值电流。图5(a)中V2s矢量对应的母线电流I2峰值最大,可以确定转子初始位置在V2s附近±30°范围内,继续比较与V2s相邻的两个电压矢量V1s、V3s对应的母线峰值电流I1、I3,由图可见I3>I1,通过定位步骤2可以将转子定位在Ⅲ区间。图5(b)中同时出现两个母线电流峰值最大值,这种情况直接将转子初始位置定位在V2矢量方向上。
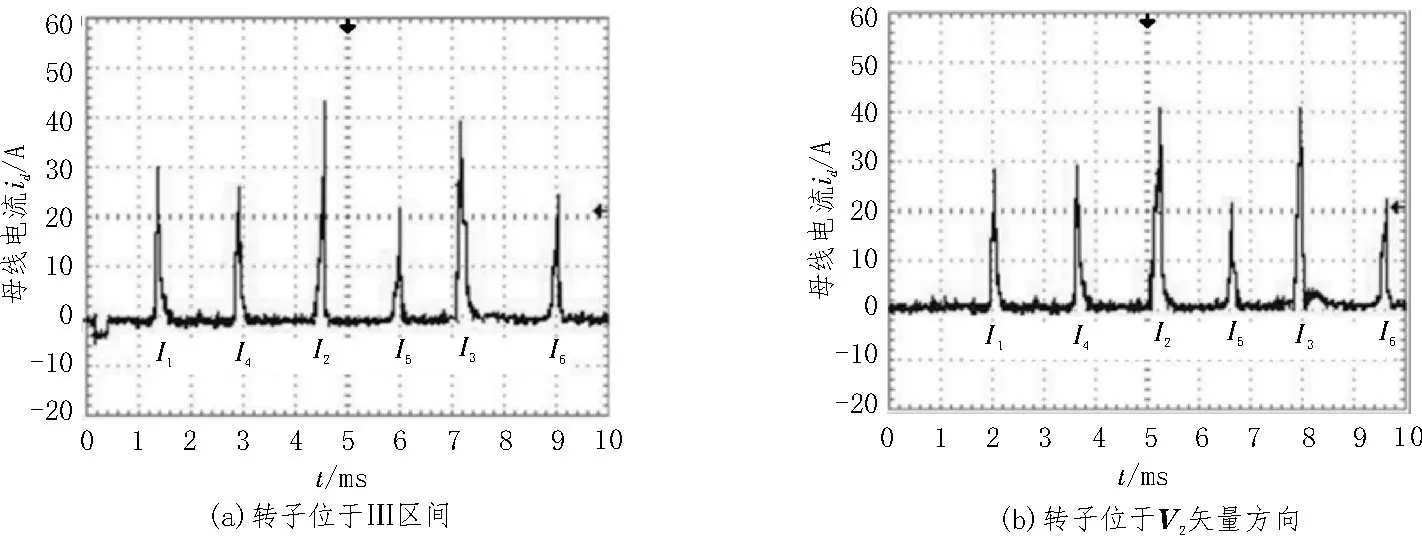
图5 定位阶段不同电压矢量对应的母线峰值电流
转子定位结束进入加速阶段,施加一组交替的长时与短时脉冲电压矢量实现加速与换相定位,此时母线电流波形如图6 所示,当两个短时脉冲矢量施加后母线电流差值达到换相电流阈值后,可以施加下一区间的长时加速脉冲,使转子加速成功。
4.2 不同环境温度下增程器整机启动实验
对增程器在不同温度下的启动进行了对比实验,选择-20 ℃和20 ℃两种环境温度,进行增程器启动实验。将增程器放入冰柜中,模拟-20 ℃低温环境,用室内空调模拟20 ℃温度环境。以无刷直流电机a 相相电流为检测量,对不同温度下的启动性能进行了测试。
1)-20 ℃增程器启动实验

图7 环境温度为-20 ℃启动时电机a相电流波形
对增程器使用预热装置进行预热,启动成功,图7(b)所示是电机a 相电流波形,启动瞬间产生40 A电流,发动机被电机拖动旋转,当发动机被拖动到点火速度后,可以自主旋转,发动机反过来带动电机旋转发电,经过0.6 s怠速运行阶段,此时电机电流为5 A,然后发动机加速到额定转速附近,电机发电电流增大到15 A,发动机转速稳定后,电机a相电流降为4 A。
2)20 ℃增程器正常启动
20 ℃正常温度下,增程器可以稳定启动,无需进行预热,相电流波形如图8 所示,与采取预热措施后-20 ℃冷启动下状态基本相同,此时发动机的阻转矩小于-20℃环境温度时的阻转矩,电机相电流最大值变小,为30 A。
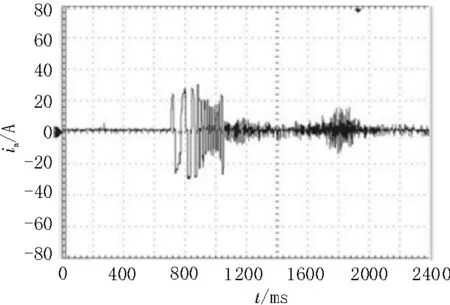
图8 环境温度为20 ℃启动时电机a相电流波形
4.3 增程器从启动到发电全过程实验
增程器从启动到发电全过程中直流母线电压与无刷直流电机a 相电流的对应波形如图9 所示,增程器启动时,由于要拖动发动机这个大负载,直流母线电压将下降,下降幅值为4~5 V,持续时间为0.3 s 左右。发动机被拖动到点火速之后,电机将转为发电状态,怠速运行0.6 s 之后发动机加速,此时电机所发电压高于72 V 直流母线电压5~6 V,将对蓄电池进行充电,持续时间为0.4 s 左右,之后电机进入发电阶段,电机采用转速和电压双闭环控制策略,所发电压略高于蓄电池电压,直流母线以较小的电流对蓄电池充电,增程器完成从启动到发电的全部过程。

图9 启动/发电全过程中直流母线电压Ud与电机相电流ia
5 结论
增程器的启动涉及到无刷直流电机和发动机两个部件的启动及相互之间的配合。针对无刷直流电机启动过程中需克服发动机变化阻转矩的特点,在传统三段式启动方法基础上,提出一种准闭环起动方法:利用定子绕组电感随转子位置不同而变化的规律,通过施加定子脉冲电压矢量、比较母线电流幅值大小的方法,实现转子30°小范围转动初始位置定位和带载准闭环加速起动;当电机转速增加到一定值时,再切换到以反电势过零点判断转子位置的状态。针对发动机起动易受低温环境影响的特点,对增程器机体、进气和燃油提出了有效的预热措施。对增程器中无刷直流电机起动和增程器整机启动进行了实验研究,实验结果表明,无刷直流电机准闭环起动方案方便有效,增程器整机启动可靠,增程器可以从启动顺利进入发电状态。该文的研究可为研发高性能电动汽车增程器提供借鉴,促进我国电动汽车产业的可持续发展。