基于多特征融合的地铁车辆制动组件异常检测
2024-03-11刘尧
刘尧
(北京市地铁运营有限公司运营一分公司,北京 102200)
地铁车辆的制动系统既庞大又复杂,同时地铁车辆的行驶环境又是不可预测而多变的[1]。尽管当前地铁车辆的制动控制系统均带有一定的制动性能检测机制,但是当车辆发生制动时难以发现组件异常。同时,地铁车辆的制动控制系统在扩展性与精准度上仍存在不足。为提升地铁车辆工作效率,确保车辆能够安全、舒适地行驶,研究出一种有效的地铁车辆制动组件异常检测技术就显得尤为重要。
对于车辆制动检测问题的研究,文献[2]中提出一种基于模糊综合评价法的地铁制动异常检测方法。基于数据挖掘理论,编写了基于模糊综合评价方法的软件,可以实现地铁车辆制动异常的检测。文献[3]中提出一种利用LSTM 自动编码器检测地铁车辆制动操作单元异常的方法。首先提取制动缸(BC)压力数据,将其分成子序列。将子序列输入LSTM 自动编码器中,为了从包含异常子序列的测试数据中检测异常,计算每个子序列的平均绝对误差,根据误差判断是否为异常。以上检测方法存在检测效果不理想的问题,因此应用多特征融合算法设计一种针对组件的地铁车辆制动组件异常检测方法。
1 多特征融合下地铁制动组件异常检测
1.1 多特征提取
通过无人机与云台搭载相机,采集地铁车辆制动组件运行时的图像。构建Gabor 滤波器,通过Gabor 特征提取方法提取地铁车辆制动组件图像空间方向与尺度上的多种纹理特征,以及由部分到整体的全面性描述特征[4]。在Gabor 滤波器的构建中,通过复数形式对其进行表达,具体如式(1)所示:
式中,(α,β) 是原始的像素点坐标;φ是Gabor滤波核的对应椭圆度;ϕ是Gabor 滤波核的实际工作范围;ε是正余弦函数的相位;δ是Gabor 滤波核的方向;χ是Gabor 滤波核的实际滤波尺度;(α′,β′) 是变量变换后图像的坐标;j是迭代正整数变量[5]。
(α′,β′) 的表达式具体如下:
其中,Gabor 滤波器的实数部分可以用式(3)来表示:
其虚数部分可以用式(4)来表示:
构建的Gabor 滤波器,选择以下四个尺度(7、12、17、22)以及六个方向(0°、30°、60°、90°、120°、150°)下的滤波器构成一个滤波器组,对地铁车辆制动组件图像实施滤波处理。滤波处理后的地铁车辆制动组件图像可以用式(5)来表示:
式中,M是滤波图像个数,此处取值为24[7]。各图的均值计算公式具体如下:
至此完成地铁车辆制动组件图像的多特征提取。
1.2 多特征融合
设计一种基于信息熵的多特征融合算法,实现地铁车辆制动组件图像多个提取特征的融合[8]。具体融合步骤如下:
1)构造数据矩阵
用n表示特征差异图的数量,其大小为K×L,将各差异图用Wi(i≤n)来表示,并将其转换为一维列向量。则多个特征差异图共同构成的数据矩阵可以用式(8)来表示:
式中,yn表示第n个矩阵数据;t是矩阵阈值[9]。
2)计算协方差矩阵
通过式(9)对数据矩阵Y对应的协方差矩阵进行计算:
式中,d是数据矩阵Y的列数;是指Y中数据的均值。
3)特征矩阵重构
对H的特征值进行计算,从而获取其特征向量,用ψi来表示。基于累计贡献率对主成分特征向量进行选取,并构建映射矩阵,具体如式(10)所示:
式中,ψk是第k个主成分特征向量。通过矩阵Q对特征矩阵进行重构,具体如式(11)所示:
4)获取融合特征的结构
用ui来表示各主成分向融合图像提供有用信息的概率,获取融合特征的结构,具体如式(12)所示:
式中,ηk指第k个融合特征的阈值[10]。
5)多特征融合
根据融合系数进行特征融合图,完成地铁车辆制动组件图像的多特征融合。
1.3 构建制动组件异常检测模型
基于CNN 设计一种BD-YOLO 地铁车辆制动组件异常检测模型,实施制动组件异常检测。其中特征处理网络单元由29 个卷积层构成,通过偏差和权重向量两个共享参数的结构定义各卷积层[12-13]。使用的卷积层激活函数为Mish 函数,具体表达式如式(14)所示:
式(14)中,ς是Mish 函数的自变量。其中,四种最大池化处理的尺寸(大小分别为1×1、5×5、9×9、13×13),多尺度特征融合单元通过添加横向、自顶向下以及自底向上的路径,与前两个单元相融合,共同输出处理、集成后特征层的特征信息[14-16]。输出的异常特征信息具体如式(15)所示:
式(15)中,gin是输入特征层变量;gtd是gin的中间特征层变量。制动组件异常检测结果由解码单元输出。
2 实际案例测试
2.1 实验设计
测试地点选在地铁车辆测试厂房的动调线上,该线路共有两种方向,一种是下行方向,一种是上行方向。在不同速度级下,使实验地铁车辆多次开往下行方向与上行方向,应用设计方法对其制动组件实施异常检测。分别在两种工况运行模式下测试设计方法的组件异常检测性能。
1)将地铁车辆静止与正常运行工况设定为情况1,在此情况下测试设计方法的组件异常检测精确率。精确率计算公式如式(16)所示:
1.2.3 心理护理 因甲亢及2型糖尿病均需要长时间的服用药物,如果患者负面情绪较为严重,会明显的影响治疗效果,所以护理人员要针对性的开展心理护理,疏导负性情绪,改善患者的心理状况。护理人员主动关心患者,沟通真诚进行,细致、体贴的实施护理,赢得患者的认可及信任。患者及家属提出问题时,护理人员要耐心、详细、热情的解答,直至患者真正了解,减轻其恐惧感,并逐渐的树立治疗信心,积极配合医护人员。
式(16)中,TP 代表真正例;TN 代表真负例;PN代表假正例;FN 代表假负例。
2)将地铁车辆正常运行与列车管不充风工况设定为情况2,在此情况下测试设计方法的组件异常检测宏平均召回率。实验测试中的具体实施步骤为:
步骤1:多种情况下采集地铁车辆制动组件图像。使用的无人机型号为经纬M600 Pro,配置如影云台。
步骤2:在云台上搭载微单相机,选用的相机为定焦35 mm、配置了快门控制器的微单相机。在地面端,通过装载Android 系统的智能手机对无人机进行控制。
步骤3:通过Gabor 特征提取方法提取地铁车辆制动组件图像的多种特征。在24 个Gabor 滤波器的滤波处理中,关键参数正余弦函数的相位取值为ε=1,Gabor 滤波核的实际工作范围为ϕ=10,Gabor滤波核的对应椭圆度φ=2 。通过式(3)和(4)表示滤波器的实部和虚部,实现图像滤波,得到滤波图像U(α,β)。
步骤4:通过式(6)和(7)计算各图的方差与均值,提取滤波后图像的多特征。
步骤5:在提取图像多特征的基础上,利用信息熵融合多特征图像,设融合特征阈值ηk为0.3。
步骤6:使用卷积层激活Mish 函数提取异常特征信息,利用构建的制动组件异常检测模型输出检测结果。
接着通过基于信息熵的多特征融合算法实施图像的多特征融合,构造各组件的特征融合图。最后利用地铁车辆制动组件异常检测模型实施制动组件的异常检测。
已知地铁车辆制动组件包括磨损超限、损坏、破裂、脏污等异常情况,具体组建名称及异常内容如表1 所示。

表1 地铁车辆制动组件异常内容
2.2 实验结果分析
在测试中,将文献[2]方法与文献[3]方法作为对比方法,共同进行制动组件异常检测性能的测试,以凸显设计方法的优势。
2.2.1 地铁车辆静止与正常运行情况下的测试结果
在实验地铁车辆静止与正常运行的情况下,设计方法与两种对比方法的组件异常检测精确率测试结果如图1 所示。
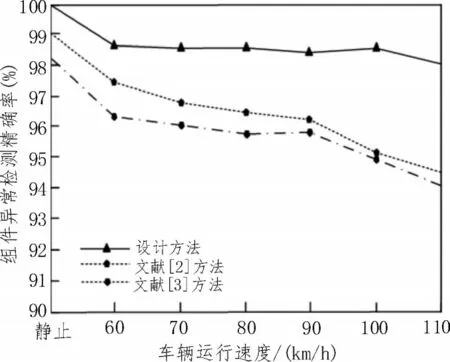
图1 组件异常检测精确率
根据图1 的测试结果,在实验地铁车辆静止时,设计方法的组件异常检测精确率达到了100%,文献[2]方法、文献[3]方法检测组件异常精确率也较高,分别为99.00%、98.27%。在实验地铁车辆正常运行的情况下,随着车辆运行速度的提升,三种方法的组件异常检测精确率均有一定降低,其中设计方法的组件异常检测精确率较高,同时其降幅也较低,而对比的两种方法检测组件异常精确率较低,降幅则较高。
2.2.2 地铁车辆正常运行与列车管不充风情况的测试结果
在地铁车辆正常运行,但列车管不充风的情况下,三种方法的组件异常检测宏平均召回率测试结果如图2 所示。

图2 组件异常检测宏平均召回率
根据图2 的测试结果,设计方法的组件异常检测宏平均召回率仍然能够保持较高的水平,整体高于95%。说明在这种情况下,设计方法的组件异常检测性能仍较好。而对比的两种方法检测组件异常宏平均召回率则低于94%,说明二者的组件异常检测性能低于设计方法。
3 结束语
地铁车辆制动系统的结构极其复杂并且组件数量多,因此组件经常发生异常。为此设计了一种地铁车辆制动组件异常检测方法,通过多特征提取与融合实现了良好的制动组件异常检测效果,取得了一定研究成果。此次研究中仍存在不足,日后将考虑其他运行环境完善检测方法。