海上直驱永磁风电系统非对称故障主动识别方法
2024-03-11汤哲
汤哲
(中国船级社质量认证有限公司,北京 100006)
海上风电的能源利用效率高于陆地风电,海上风电系统具有资源状况稳定、接近负载中心、高发电量、无环境污染等优点。然而,受到海洋气候等诸多不确定因素的影响,其运行与维护环境更为复杂。近年来,众多学者针对海上直驱永磁风电系统的故障识别进行了大量的研究。文献[1]提出基于储能和序分量控制的风电系统非对称故障检测方法,在传统故障检测约束条件中结合非对称故障下的电压跌落程度,平衡母线有功功率,完成故障检测。文献[2]提出基于变流器容错特性的风电系统故障检测方法,采用容错控制算法提取故障的负序特征,将负序特征输入到径向基神经网络中完成故障检测。上述两种方法虽然能够完成风电系统的故障检测,但是由于风电系统中设备多、管理复杂,如果不进行基频信号的去除,则会降低故障检测的精度。为此提出海上直驱永磁风电系统非对称故障主动识别方法。
1 风电系统运行特性分析
当风电系统稳定运行时,变流器输出功率与直流输入功率大小一致,线路有功功率为0[3],线路两端电压不变;当风电系统不稳定运行时,线路两端电压会出现非对称跌落,此时变流器直流输出功率减小,而风机输出功率保持不变,多出的功率则被支撑电容吸收,导致线路两端电压升高[4-5]。多出功率的计算公式为:
式中,P1、P2分别表示变流器输出功率和风机输出功率;C1-2、U1-2分别表示1-2 线路段的电容与电压。
由于直驱永磁风电系统的风力发电机是一种三相同步发电机,该发电机电压非均匀性的降低只会导致正序电压分量振幅的降低,从而导致负序电压、电流分量和零序分量的出现[6-8]。将其写入矢量,并将其转换成正序的旋转坐标系,可以得到:
2 非对称故障主动识别
2.1 信号基频消除处理
由于故障电流中谐波频率对应的波动幅值比电流基波幅值要小,所以直接对电流分析很难确定故障特征频率,因此,采用主动学习方法消除信号基频。
如果在连续时间内存在故障信号I(t),那么主动学习方式是对I(t)进行卷积变换,变换过程可以描述为:
式中,ϑ(t)表示信号幅值包络;θ表示瞬时相位。式(5)中两项参数的计算公式为:
根据信号解析结果,可获取调制频率实现解调,消除原始信号中的基频。
2.2 非对称故障主动识别过程
根据风电系统运行特性分析结果与基频消除结果,设计非对称故障主动识别流程,如下所示:
步骤1:监测风电系统的运行数据,对系统数据进行实时分类、比对、分析[11]。在分类问题中,采用对数似然函数对系统数据进行分类,如下:
式中,n表示数据总量;fi(x)表示主动学习输出[12]。采用逆向扩散法调整主动学习参数,逆向扩散法中参数梯度的计算公式为:
式中,λk表示第k次学习更新的系数;r(x)表示偏导函数[13]。k次学习更新后的梯度平均值为:
式中,φ表示梯度衰减系数;t表示更新时间。
步骤2:判断是否存在故障、预警状态,如果有,则进行下一步,如果没有,则继续监测[14]。
步骤3:采用电压幅度和时间宽度双重标准的主动辨识方法,以改善故障识别可靠性。
对输入的线电压误差进行分析,得到的逻辑变量为:
式中,vt表示线电压误差阈值。如果α=0,说明风电系统处于正常工作状态;如果α=1 或α=-1,说明风电系统中存在线电压误差,存在非对称故障[15-16]。非对称故障会导致两个线电压同时发生大幅度变化,因此可以采用电压幅值和时间宽度双重标准的主动识别方法进行误差检测:
式中,αA、αB、αC分别表示A、B、C 相逻辑变量,如果E≥1,说明风电系统可能存在线电压误差;如果E<1,则说明风电系统处于正常状态。为了避免出现误判,设定了时间宽度标准,定义的故障检测时间为:
式中,η表示时间因子;Te表示信号采集周期。结合上述两个公式,可构建风电系统非对称故障的主动识别表达式,如下:
式中,te表示误差计时时间长度。
步骤4:确认发生的错误,并呼叫对应错误处理模块来处理。
步骤5:完成非对称故障的主动识别。
3 实 验
选用背对背PWM 变换器结构的海上直驱永磁风电系统作为研究对象,背对背拓扑结构能够使电能双向流动,将交流电的频率和振幅转换成电能,可以满足实验测试的要求。
3.1 故障数据
当海上直驱永磁风电系统运行至0.6 s 时,变流器突然故障,流经变流器的三相电流、直流分量以及谐波畸变程度如图1 所示。

图1 变流器实际故障数据分析
以图1 所示的实际故障数据为基础,展开实验研究。
3.2 实验结果与分析
文献[1]方法、文献[2]方法和所提出的非对称故障主动识别方法得到的检测数据如图2、3、4 所示。

图2 三相电流故障数据分析
由图2 可知,文献[1]方法只发现了C 相故障问题,未发现A 相、B 相故障问题;文献[2]发现B 相、C相故障问题,未发现A 相故障问题;使用非对称故障主动识别方法能够发现A 相、B 相、C 相的故障问题。
由图3 可知,文献[1]方法下A、B、C 三相直流分量由0 A降到-0.65 A、由0 A降到-1.00 A、由0 A 升到0.5 A,与实际值变化范围不一致;文献[2]方法下C 相直流分量变化范围与实际值基本一致,A、B两相直流分量分别由0 A 降到-0.35 A、由0 A 降到-0.75 A,与实际值变化范围不一致;使用非对称故障主动识别方法A 相与C 相直流分量变化幅度与实际值一致,B 相直流分量由0 A 降到-0.50 A,与实际数据仅存在0.05 A 的误差。

图3 直流分量故障数据分析
由图4 可知,使用非对称故障主动识别方法A相与C 相谐波畸变程度与实际值一致,B 相谐波畸变程度与实际值存在0.05 的误差;使用其余两种方法谐波畸变程度均与实际值不一致。
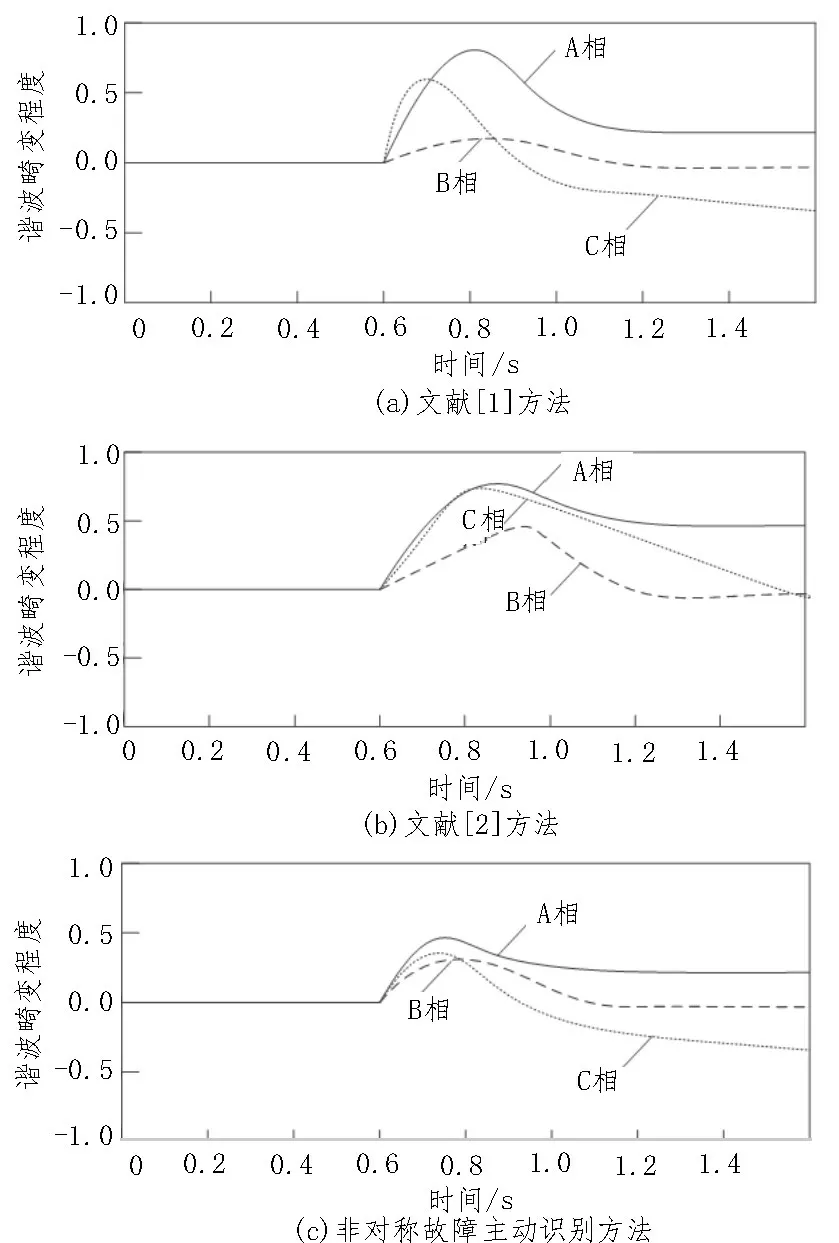
图4 谐波畸变程度数据分析
4 结束语
为了提高海上风电系统运行的稳定性,提出了海上直驱永磁风电系统非对称故障主动识别方法。该方法根据非对称故障下系统运行特性,通过时间宽度双重标准实现故障主动识别。并通过实验验证了所研究方法应用的有效性,为风险系统的可靠性应用提供了技术支持。